Изобретение относится к области машиностроения и может быть использовано в устройстве для перемотки материала.
Целью изобретения является повышение надежности.
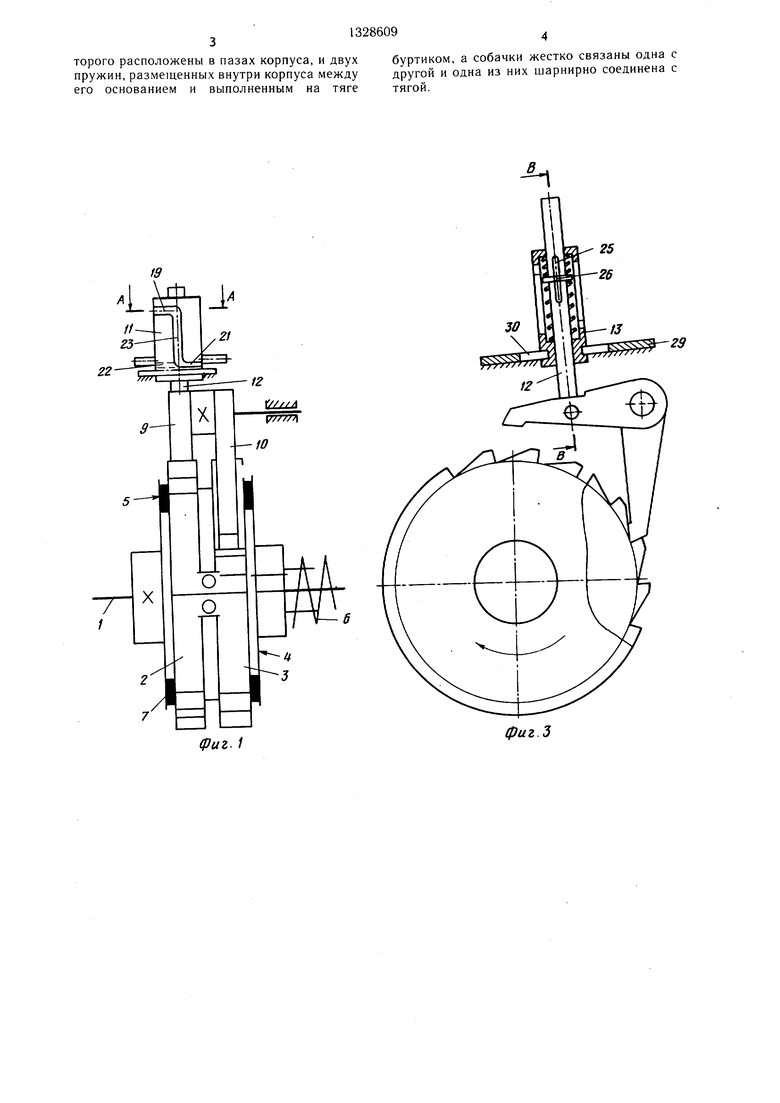
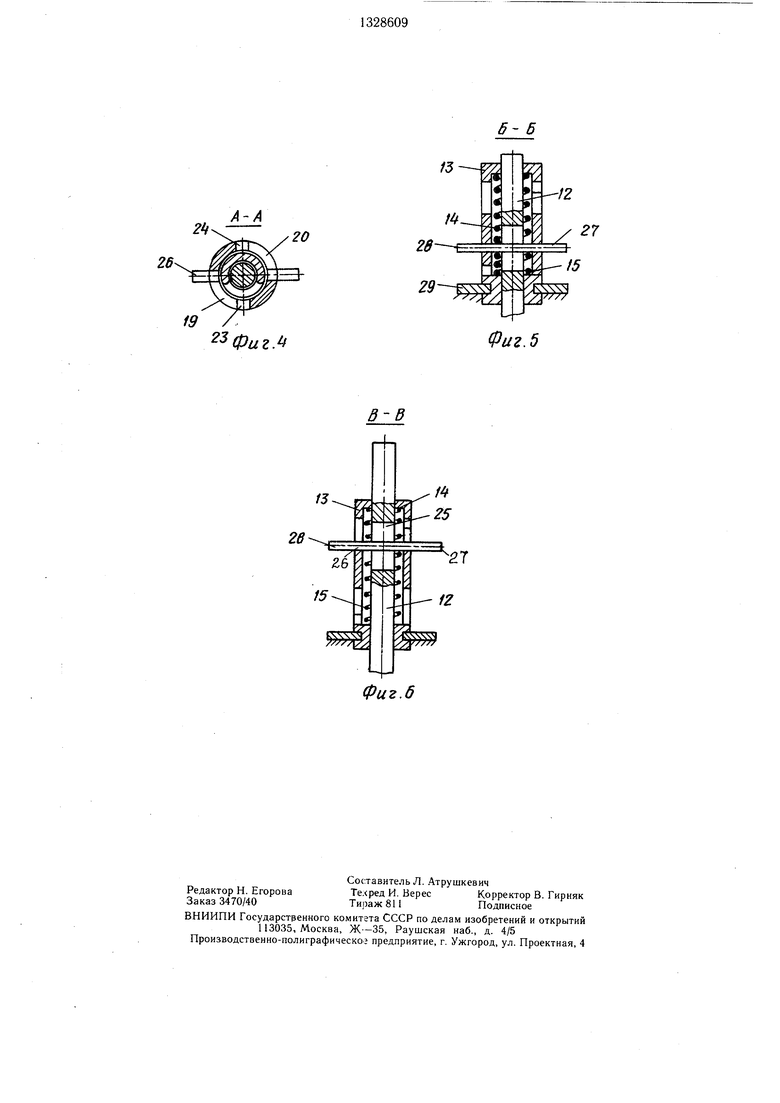
На фиг. 1 показана кинематическая схема предлагаемого храпового механизма; на фиг. 2 - схема храпового механизма при самоторможении по часовой стрелке; на фиг. 3 - то же, при самоторможении против часовой стрелки; на фиг. 4 - разрез А-А на фиг. 1; на фиг. 5 - разрез Б-Б на фиг. 2; на фиг. 6 - разрез В-В на фиг. 3.
Храповый механизм содержит свободно вращающиеся на валу 1 храповые колеса
пуса 13 (фиг. 5). Тяга 12 подпружинена пружиной 14, которая торцовыми поверхностями взаимодействует с буртиком 18 тяги 12 и торцовой поверхностью 16 корпуса 13. Со5 бачка 9 под действием тяги 12 входит во взаимодействие зубьями 8 храпового колеса. Храповое колесо 2, вращаясь против часовой стрелки, поджимает собачку 9 BBepXj и тяга 12, благодаря пазу в ней, может перемещаться вверх, оставаясь подпружи10 ненной пружиной 14.
Таким образом, собачка 9 находится в подпружиненном взаимодействии с храповым колесом 2. В этом случае устройство предусматривает свободное вращение
2 и 3, расположенные между дисками 4 вала только против часовой стрелки и оси 5, прижатыми к храповым колесам пружиной 6 через фрикционные накладки 7, Храповые колеса расположены соосно, закреплены неподвижно относительно друг друга и имеют противоположное направление
тановку при изменении направления вращения, т. е. самоторможение по часовой стрелке.
При изменении условия работы на противоположное (фиг. 3) тяга 12 при помощи
и 24 в корпусе 13 до верхнего положения, затем поворачивают тягу 12 посредством стержня 26 в пазах 19 и 20 на 90°. При этом пружина 14 сжата и под действием силы сжатия действует на стер- 25 жень 26.
Тяга 12 подпружинена пружиной 15, которая торцовыми поверхностями взаимодействует с буртиком 18 тяги 12 и торцовой поверхностью 17 корпуса 13. Собачка 10 под действием тяги 12 входит во взаимодействие с зубьями храпового колеса 3, направленными против часовой стрелки. Храповое колесо 3, вращаясь по часовой стрелке, поджимает собачку 10, и тяга 12, благодаря пазу в ней, перемещается вниз, оставаясь подпружиненной пружиной 15. Таким образом, собачка 10 находится в подпружиненном взаимодействии с храповым колесом 3.
30
зубьев 8. Собачки 9 и 10 храпового ме- 20 стержня 26 перемещают вверх по пазам 23 ханизма жестко связаны друг с другом и одна (9) из них щарнирно соединена с переключающим устройством 11 для собачек посредством тяги 12. Это щарнирное соединение может быть выполнено сферическим.
Переключающее устройство состоит из цилиндрического корпуса 13, расположенных внутри его двух пружин 14 и 15, опирающихся на торцы (торцовые поверхности) 16 и 17 корпуса и на буртик 18 тяги 12. На корпусе выполнены четыре дуговых паза 19, 20 и 21, 22, расположенных попарно на различных уровнях, и два осевых паза 23 и 24, соединяющих по два дуговых паза - соответственно 19 и 21, 20 и 22 на различных уровнях. На тяге 12 выполнен осевой паз 25, в нем перпендикулярно оси размещен стержень 26, концы 27 и 28 которого расположены в пазах корпуса. Корпус 13 установлен на неподвижной опоре 29 с возможностью перемещения в ее пазу 30. Длина паза 25 в тяге 12 равна двум высотам зубьев храпового колеса плюс сечение стержня 26. Толщина буртика 18 на тяге 12 равна диаметру стержня 26.
Храповый механизм работает следующим образом.
При вращении вала 1 силы трения между храповыми колесами и прокладками увлекают храповые колеса. В зависимости от того, какое направление вращения выбрано рабочим, устанавливают переключающее устройство в требуемое положение.
При вращении храпового колеса против часовой стрелки (фиг. 2) тягу 12 при помощи стержня 26 перемещают вниз по пазам 23 и 24 в корпусе 13 до нижнего крайнего положения, затем поворачивают тягу 12 посредством стержня 26 в пазах 21 и 22 на 90°. При этом пружина 15 сжата и под действием- силы сжатия действует на стержень 26, выводя его вверх в нейтральное положение тяги 12, так как ход стержня ограничивается пазами кор35
40
45
50
55
Предлагаемая конструкция храпового механизма даст возможность надежного взаимодействия собачки с храповым колесом за счет воздействия подпружиненного механизма.
Формула изобретения
Храповый механизм, содержащий два соосно расположенных храповых колеса с противоположным направлением зубьев, две подпружиненные собачки и переключающее устройство для собачек, отличающийся тем, что, с целью повыщения надежности, переключающее устройство выполнено в виде цилиндрического корпуса с четырьмя дуговыми пазами, расположенными попарно на различных уровнях и двумя осевыми пазами, соединяющими по два расположенных на различных уровнях дуговых паза, тяги с осевым пазом и размещенным в этом пазу перпендикулярно оси стержнем, концы копуса 13 (фиг. 5). Тяга 12 подпружинена пружиной 14, которая торцовыми поверхностями взаимодействует с буртиком 18 тяги 12 и торцовой поверхностью 16 корпуса 13. Собачка 9 под действием тяги 12 входит во взаимодействие зубьями 8 храпового колеса. Храповое колесо 2, вращаясь против часовой стрелки, поджимает собачку 9 BBepXj и тяга 12, благодаря пазу в ней, может перемещаться вверх, оставаясь подпружиненной пружиной 14.
Таким образом, собачка 9 находится в подпружиненном взаимодействии с храповым колесом 2. В этом случае устройство предусматривает свободное вращение
вала только против часовой стрелки и остановку при изменении направления вращения, т. е. самоторможение по часовой стрелке.
При изменении условия работы на противоположное (фиг. 3) тяга 12 при помощи
и 24 в корпусе 13 до верхнего положения, затем поворачивают тягу 12 посредством стержня 26 в пазах 19 и 20 на 90°. При этом пружина 14 сжата и под действием силы сжатия действует на стер- 25 жень 26.
20 стержня 26 перемещают вверх по пазам 23
Тяга 12 подпружинена пружиной 15, которая торцовыми поверхностями взаимодействует с буртиком 18 тяги 12 и торцовой поверхностью 17 корпуса 13. Собачка 10 под действием тяги 12 входит во взаимодействие с зубьями храпового колеса 3, направленными против часовой стрелки. Храповое колесо 3, вращаясь по часовой стрелке, поджимает собачку 10, и тяга 12, благодаря пазу в ней, перемещается вниз, оставаясь подпружиненной пружиной 15. Таким образом, собачка 10 находится в подпружиненном взаимодействии с храповым колесом 3.
0
5
40
45
50
55
Предлагаемая конструкция храпового механизма даст возможность надежного взаимодействия собачки с храповым колесом за счет воздействия подпружиненного механизма.
Формула изобретения
Храповый механизм, содержащий два соосно расположенных храповых колеса с противоположным направлением зубьев, две подпружиненные собачки и переключающее устройство для собачек, отличающийся тем, что, с целью повыщения надежности, переключающее устройство выполнено в виде цилиндрического корпуса с четырьмя дуговыми пазами, расположенными попарно на различных уровнях и двумя осевыми пазами, соединяющими по два расположенных на различных уровнях дуговых паза, тяги с осевым пазом и размещенным в этом пазу перпендикулярно оси стержнем, концы ко13286094
торого расположены в пазах корпуса, и двух буртиком, а собачки жестко связаны одна с пружин, размещенных внутри корпуса между другой и одна из них шарнирно соединена с его основанием и выполненным на тяге тягой.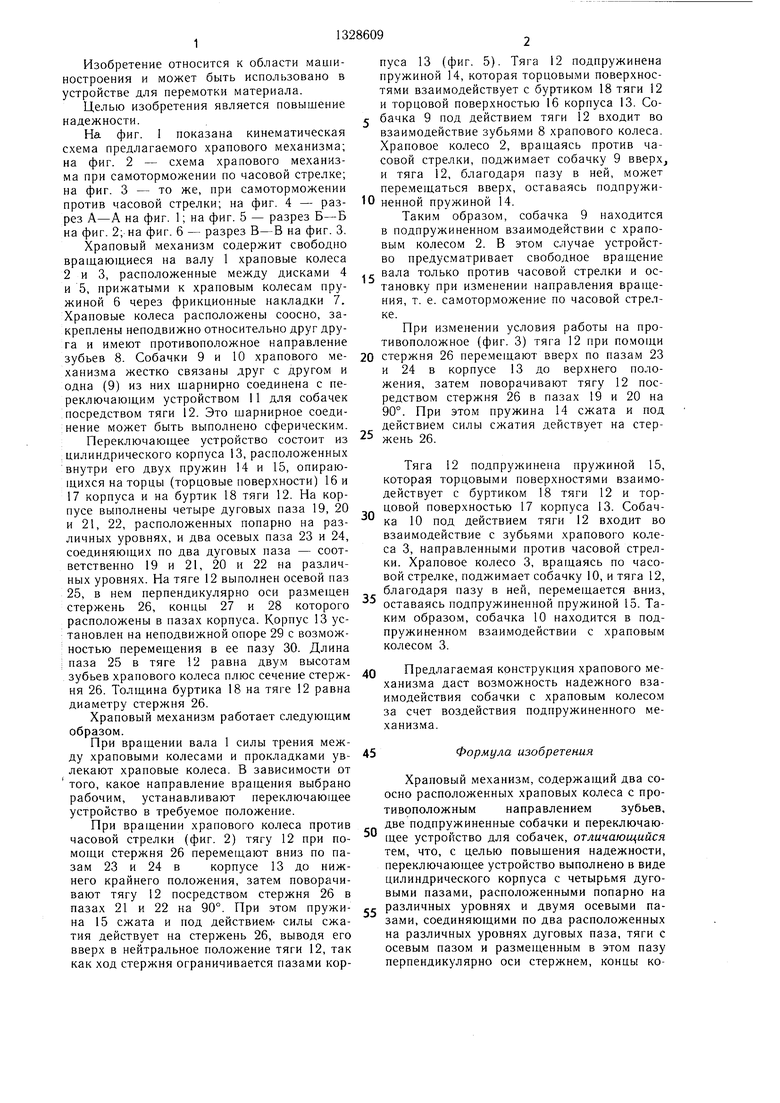
| название | год | авторы | номер документа |
|---|---|---|---|
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| Тормозная втулка велосипеда | 1989 |
|
SU1689199A1 |
| Устройство для прокручивания рабочих органов зерноуборочного комбайна | 1981 |
|
SU1012836A2 |
| Храповой механизм | 1983 |
|
SU1099152A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОСТАНОВКИ ГИЛЬЗОВОЙ МАШИНЫ | 1950 |
|
SU92081A1 |
| Предохранительная муфта | 1982 |
|
SU1211493A1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Самоходная многоопорная оросительная машина | 1983 |
|
SU1147292A1 |
| Реверсивная храповая муфта | 1986 |
|
SU1315685A1 |
| Аварийно-запирающееся втягивающее устройство для ремня безопасности транспортного средства | 1984 |
|
SU1426445A3 |
Изобретение относится к области маши ностроения и может быть использовано в устройстве для перемотки материала. Целью изобретения является повышение надежности. Храповой механизм состоит из двух храповых колес 2 и 3, соединенных жестко между собой и имеющих противоположное направление зубьев.
Изобретение относится к области машиностроения и может быть использовано в устройстве для перемотки материала. Целью изобретения является повышение надежности. Храповой механизм состоит из двух храповых колес 2 и 3, соединенных жестко между собой и имеющих противо-, положное направление зубьев. С храповыми зубьями поочередно взаимодействуют собачки 9 и 10, жестко соединенные между собой. Переключающее устройство для собачек состоит из цилиндрического корпуса, расположенных внутри него двух пружин и тяги 12 со стержнем, установленным свободно в пазах корпуса и тяги. Тяга 12 шарнирно соединена с одной из собачек 9. При перемещении тяги 12 в корпусе вводится в зацепление одна из собачек с соответствующим храповым колесом. Другая собачка автоматически выводится из зацепления. Каждое храповое колесо может стопориться соответствующей собачкой при вращении в одном направлении и растормаживаться при вращении в другом направлении, поднимая собачку вместе с под. пружиненной тягой. 6 ил. S (Л гя со ьо 00 05 о со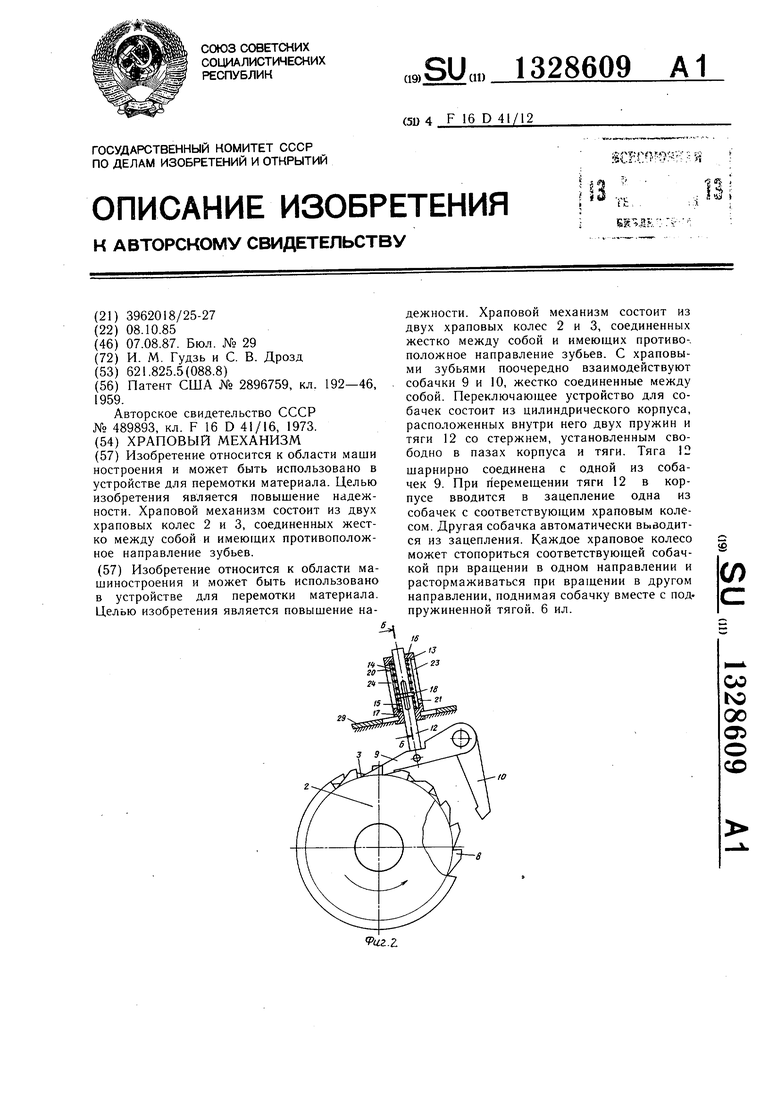
(Риг. /
фиг.З
А-А
ФигМ
Фиг. 5
Фиг.6
| Патент США № 2896759, кл | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Реверсивный храповый механизм | 1973 |
|
SU489893A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
