1
Изобретение относится к машинестроению, а именно к кривошипно-ша- тунным механизмам, и может быть использовано в качестве исполнительного механизма в производственных машинах в металлургической, станкостроительной, легкой, полиграфической и других отраслях про й1шленности.
Цель изобретения - повьш1ение надежности механизма путем исключения лишних кинематических связей,
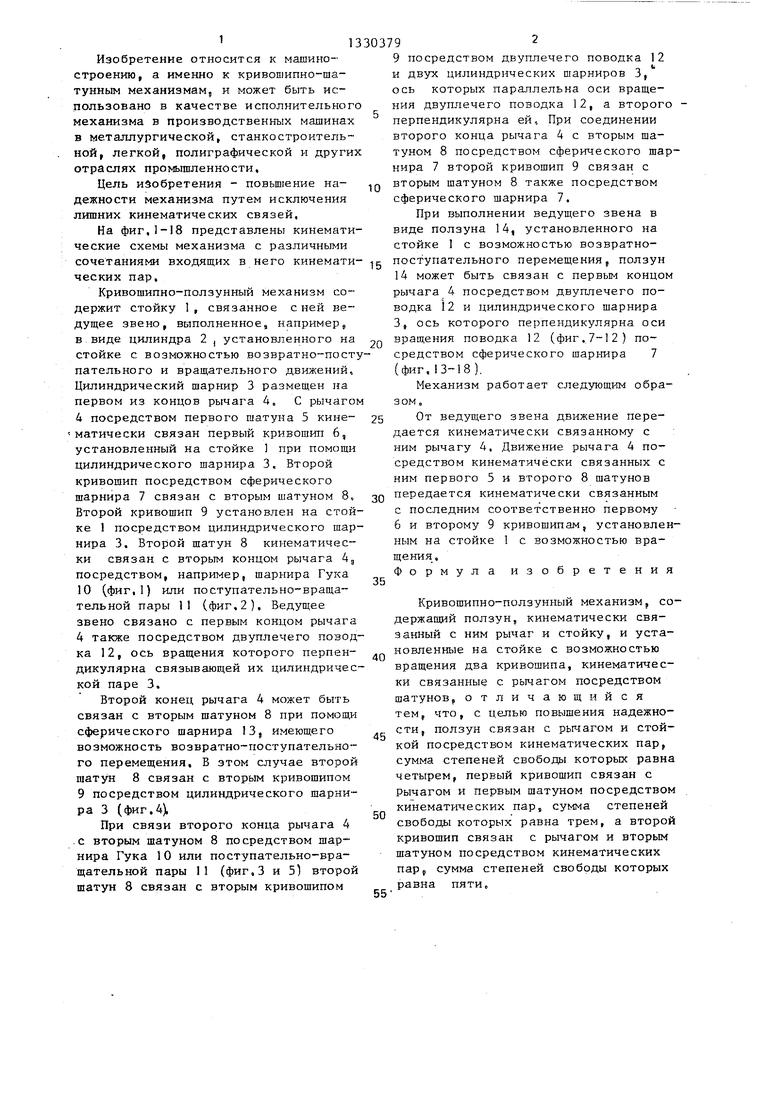
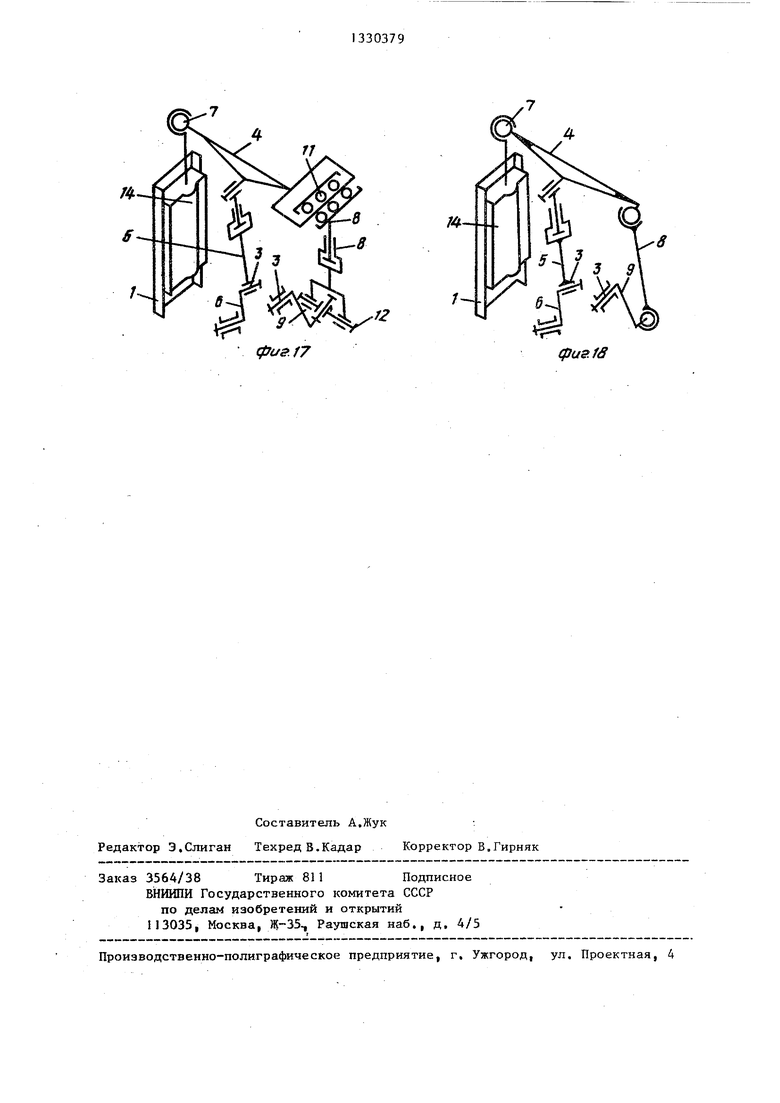
На фиг,1-18 представлены кинематические схемы механизма с различными сочетаниями входящих в него кинематических пар,
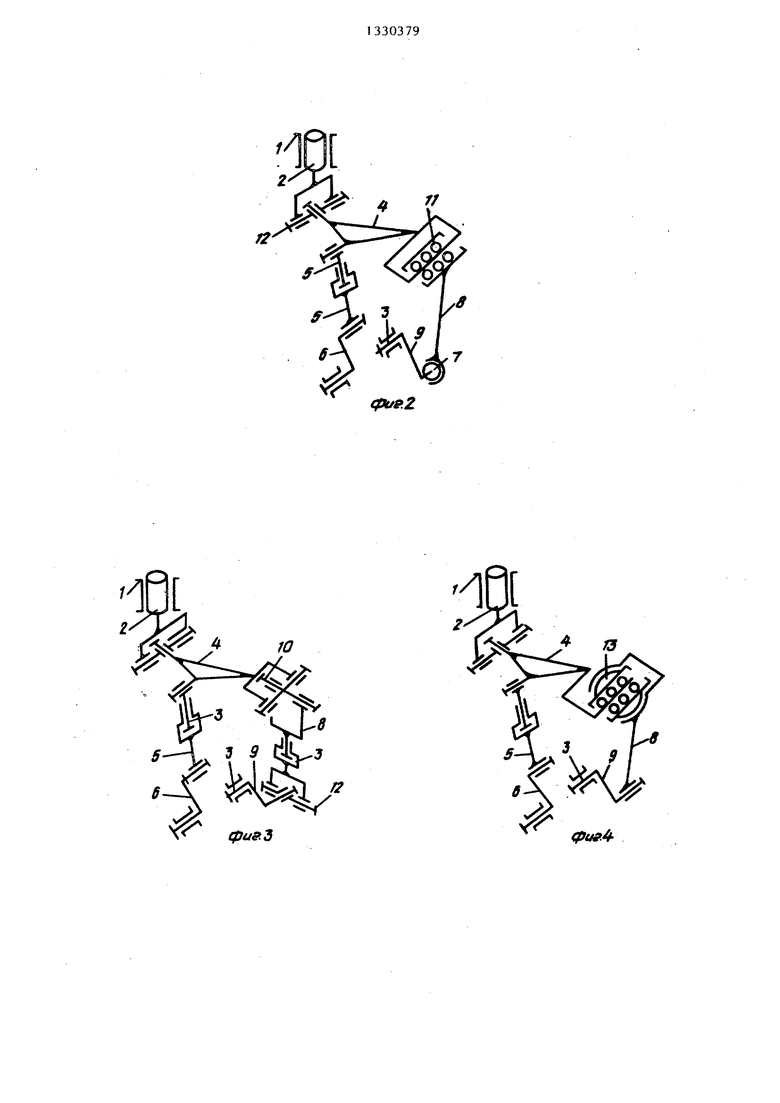
Кривошипно-ползунный механизм содержит стойку 1, связанное с ней ведущее звено, выполненное, например, в,виде цилиндра 2 , установленного на стойке с возможностью возвратно-поступательного и вращательного движений, Цилиндрический шарнир 3 размещен на первом из концов рычага 4, С рычагом 4 посредством первого шатуна 5 кинематически связан первый кривошип 6, установленный на стойке при помощи цилиндрического шарнира 3. Второй кривошип посредством сферического шарнира 7 связан с вторым шатуном 8, Второй кривошип 9 установлен на стойке 1 посредством цилиндрического шарнира 3. Второй шатун 8 кинематически связан с вторым концом рычага 4д посредством, например, шарнира Гука 10 (фиг,1) или поступательно-вращательной пары 11 (фиг,2). Ведущее звено связано с первым концом рычага 4 также посредством двуплечего поводка 12, ось вращения которого перпендикулярна связывающей их цилиндрической паре 3,
Второй конец рычага 4 может быть связан с вторым шатуном 8 при помош,и сферического шарнира 13, имеющего возможность возвратно-поступательного перемещения, Б зтом случае второй шатун 8 связан с вторым кривошипом 9 посредством цилиндрического шарнира 3 (фиг,4),
При связи второго конца рычага 4 .с вторым шатуном 8 посредством шарнира Гука 10 или поступательно-вращательной пары 11 (фиг,3 и 5) второй шатун 8 связан с вторым кривошипом
1330379
5
0
5
0
12
ti
5
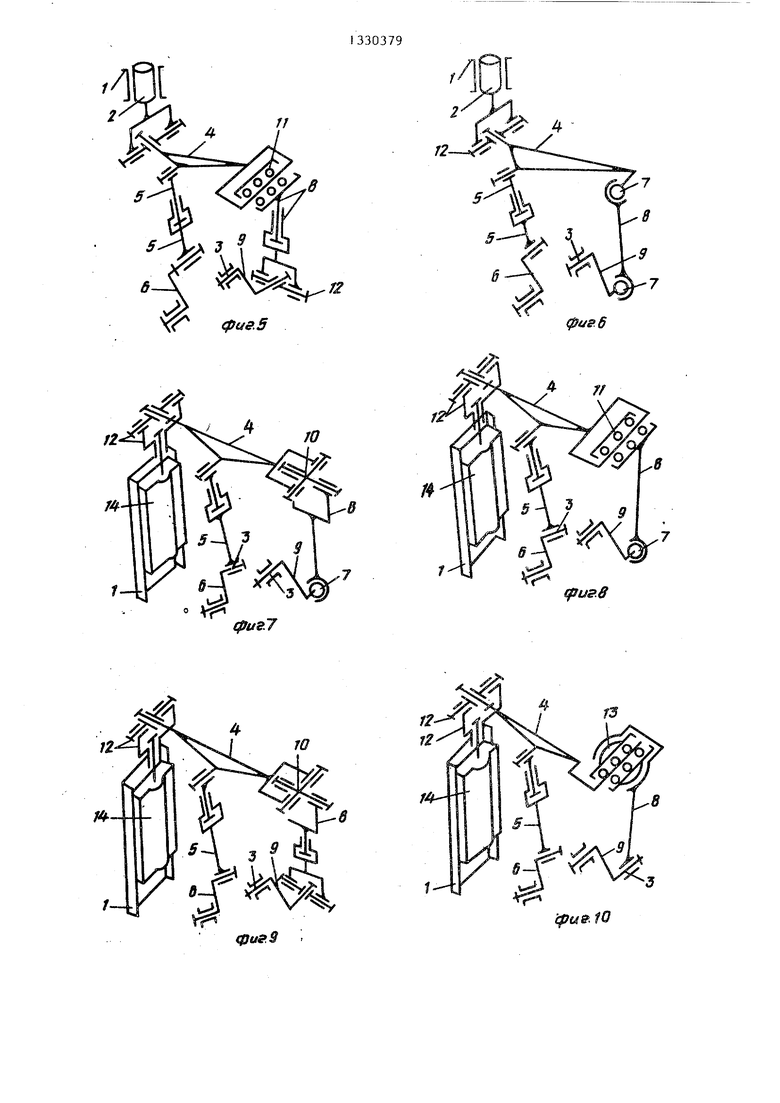
9 посредством двуплечего поводка и двух цилиндрических шарниров 3, ось которых параллельна оси вращения двуплечего поводка 12, а второго - перпендикулярна ей. При соединении второго конца рычага 4 с вторым шатуном 8 посредством сферического шарнира 7 второй кривошип 9 связан с вторым шатуном 8 также посредством сферического шарнира 7,
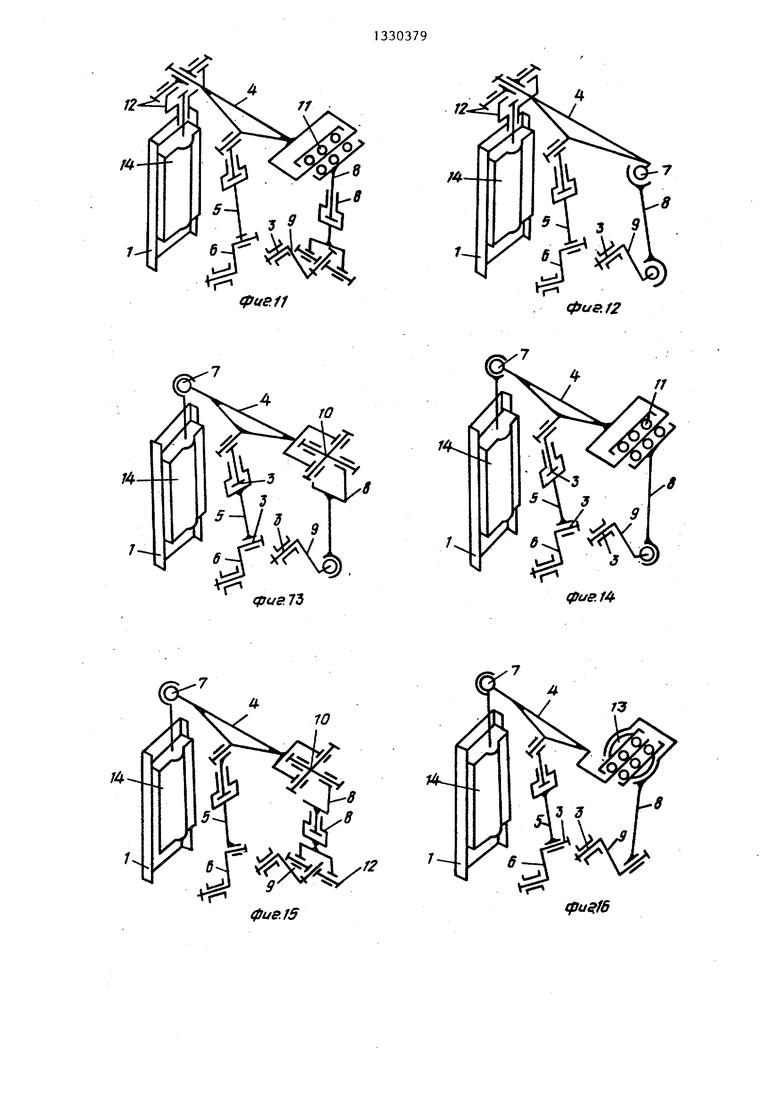
При выполнении ведущего звена в виде ползуна 14, установленного на стойке I с возможностью возвратно- поступательного перемещения, ползун 14 может быть связан с первым концом рычага 4 посредством двуплечего поводка 12 и цилиндрического шарнира 3, ось которого перпендикулярна оси вращения поводка 12 (фиг.7-12) посредством сферического шарнира 7 (фиг, 13-18).
Механизм работает следующим образом.
От ведущего звена движение передается кинематически связанному с : ним рычагу 4, Движение рычага 4 посредством кинематически связанных с ним первого 5 и второго 8 шатунов передается кинематически связанным с последним соответственно первому 6 и второму 9 кривошипам, установленным на стойке 1 с возможностью вра- щения. Форм
ула изобретения
Кривошипно-ползунный механизм,
со
держаший ползун, кинематически связанный с ним рычаг и стойку, и установленные на стойке с возможностью вращения два кривошипа, кинематически связанные с рычагом посредством шатунов, отличающийся тем, что, с целью повышения надежности, ползун связан с рычагом и стойкой посредством кинематических пар, сумма степеней свободы которых равна четырем, первый кривошип связан с рычагом и первым шатуном посредством кинематических пар, сумма степеней свободы которых равна трем, а второй кривошип связан с рычагом и вторым шатуном посредством кинематических парр сумма степеней свободы которых равна пяти.
iA
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный механизм | 1986 |
|
SU1330378A1 |
| Кривошипно-ползунный механизм | 1986 |
|
SU1330380A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Пространственный рычажный механизм с периодическими остановками | 1985 |
|
SU1307134A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
Изобретение относится к машиностроению, а именно к кривошипно-пол- зунным механизмам. Цель изобретения - повышение надежности за счет исключения лишних кинематических связей. Механизм содержит стойку I, размещенные на ней-ведущее звено, кинематически связанный с ним рычаг 4, два кривошипа 6 и 9, установленные с возможностью вращения на стойке 1 н кинематически связанные с рычагом 4 посредством соответствующих шатунов 5 и 8, Причем кинематические пары, связывающие элементы механизма, могут быть выполнены в виде поступательно- вращательной, цилиндрической и сферической пар. При этом сумма степеней свободы кинематических пар, посредством которых ведущее звено связано с рычагом 4, должна быть равна четырем; первый кривошип 6 связан с первым шатуном 5 и рычагом 4 - сумма должна быть равна трем; второй кривошип 9 связан с вторым шатуном 8 и рычагом 4 - сумма должна быть равна пяти. Движение ведомого звена передается рычагу 4, который посредством шатунов 5 и 8 приводит во вращение кривошипы 6 и 9, 18 ил. о (Л 00 00 о 00 fpt/ff.i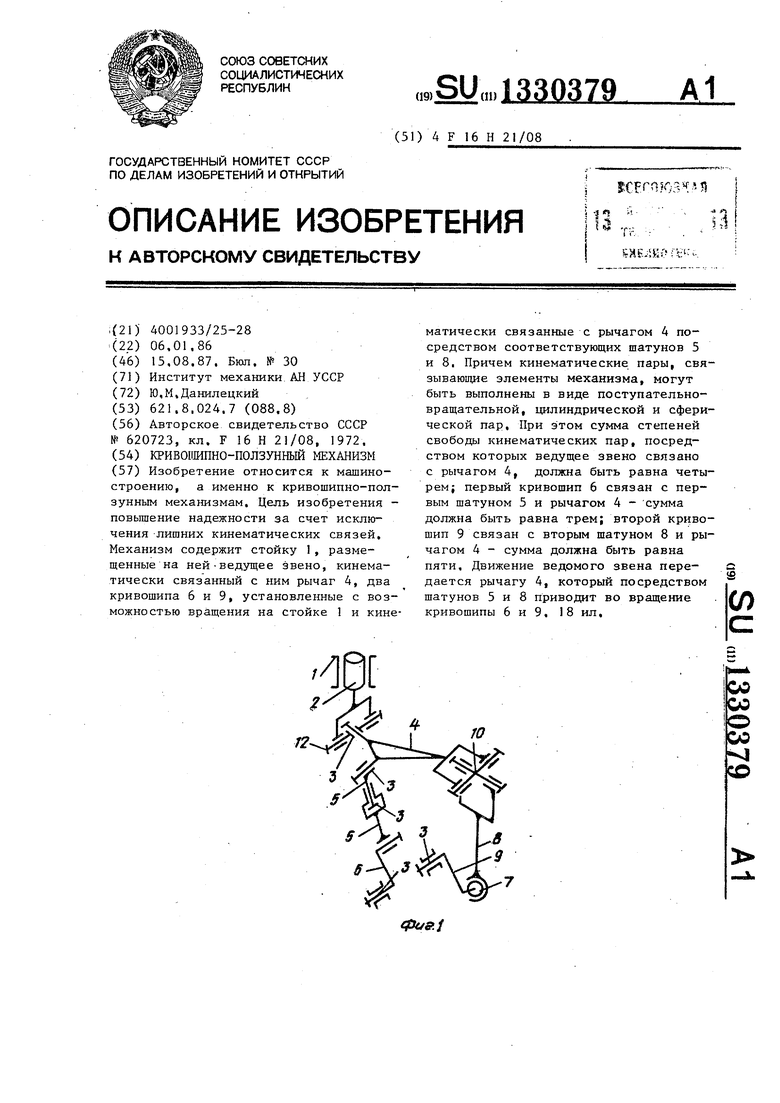
puf.4
v
сСX
т
.f НИ
Г .S
фие.6
10
effue.7
7f
сригв
Ч
-Г W
fpu. 10
фиУ.З
Ч
fftte.ii
фи&.Г2
то
44/
фи&ЛЪ
П
фае./4
10
/4
.5
/3
(fJUff.f
epusfS
| Шатунно-кривошипный механизм с регулируемым ходом ползуна | 1972 |
|
SU620723A1 |
