Изобретение относится к машиностроению, а именно к кривошипно-пол- зунным механизмам, и может быть использовано в качестве исполнительног механизма в производственных машинах в металлургической, станкостроительной, легкой, полиграфической и други отраслях промьшшенности.
Цель изобретения - повышение на- дежности механизма путем исключения лишних кинематических связей.
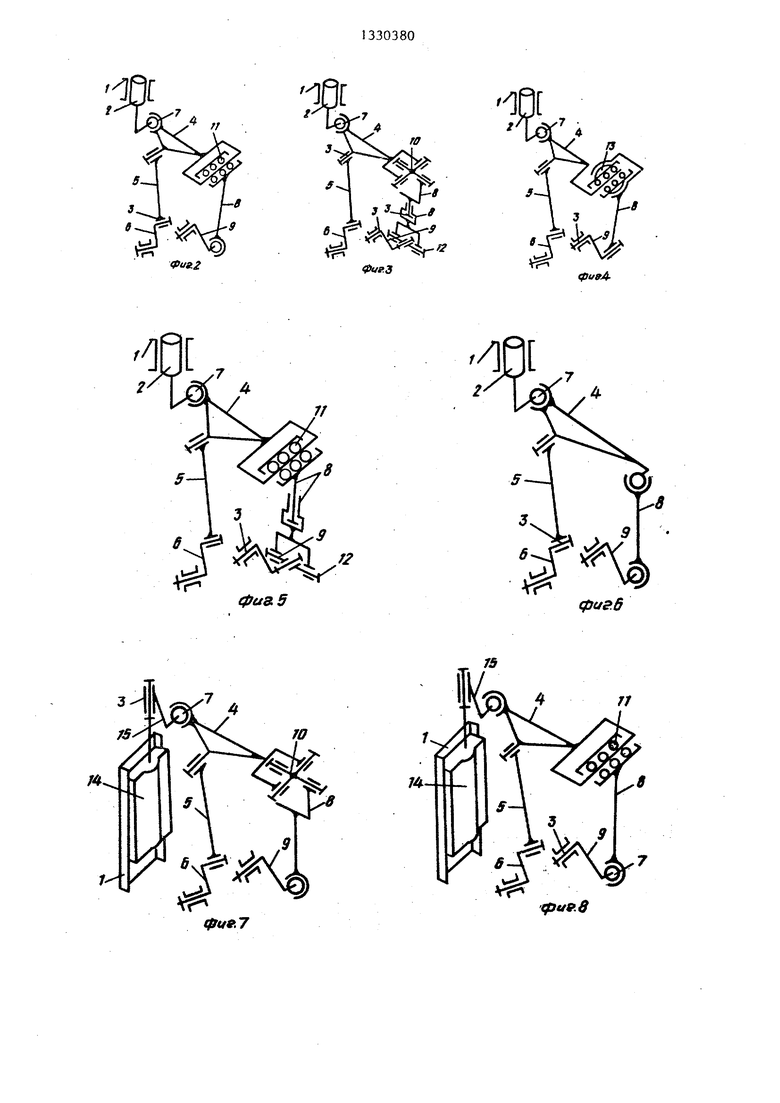
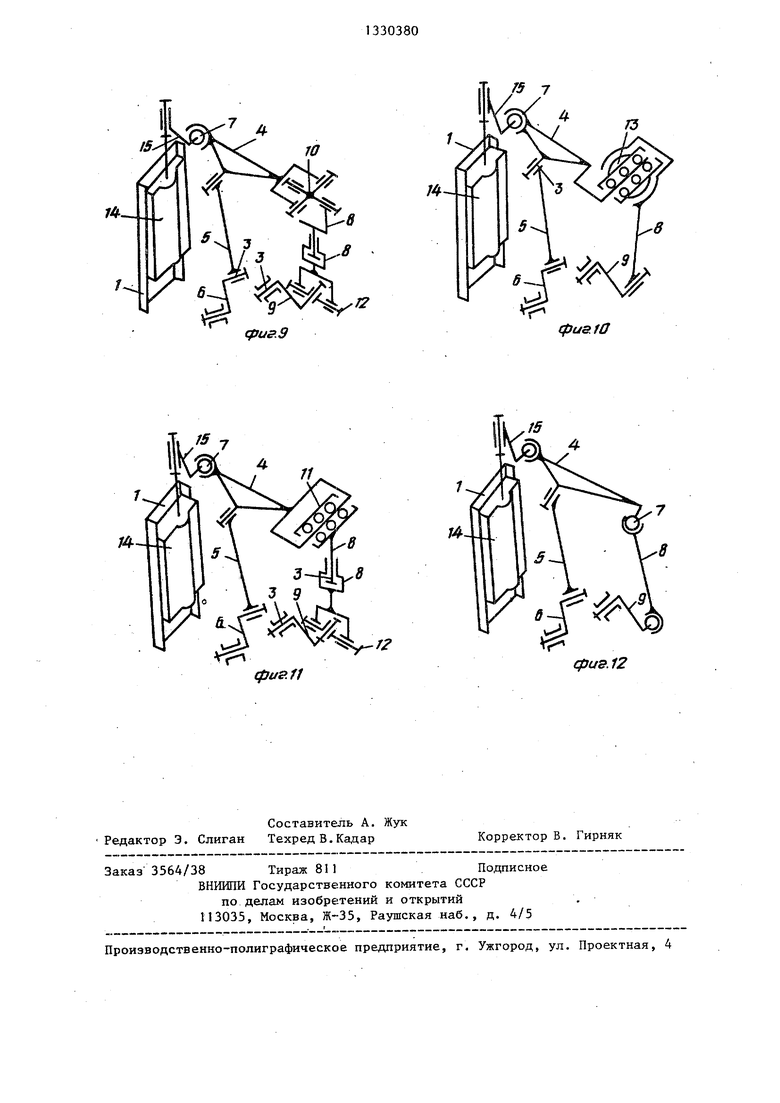
На фиг. 1-12 представлены кинематические схемы механизма с различными сочетаниями входящих в него кинематических пар.
Кривошипно-ползунный механизм содержит стойку 1, связанное с ней ведущее звено, выполненное, например, в виде цилиндра 2, установленного на стойке с возможностью возвратно-поступательного и вращательного движений. На стойке 1 с возможностью вращения посредством цилиндрического щарнира 3 установлены два кривошипа. С ведущим звеном кинематически связан рычаг 4, который посредством цилиндрических шарниров 3 связан с первым шатуном 5 и первым кривошипом 6. Кинематическая связь рычага 4 с веду- щим звеном вьшолнена в виде сферического шарнира 7. Рычаг 4 также кинематически связан посредством второго шатуна 8 с. вторым кривошипом 9. При этом, если второй кривошип 9 йвязан с вторым шатуном 8 посредством сферического шарнира 7, рычаг 4 с вторым шатуном может быть связан посредством шарнира Гука 10 (фиг. I) или поступательно-вращательной пары 11 (фиг. 2) или сферического шарнира 7 (фиг. 6)..
Второй шатун 8 может быть связан с вторым кривошипом 9 посредством двуплечего поводка 12 и двух цилиндрических шарниров 3 со взаимно перпендикулярными осями (фиг. 3 и 5).
Рычаг 4 может быть связан с вторым шатуном 8 посредством сферического
5
0
о
5
5
0
5
шарнира 13, имеющего возможность осевого перемещения, например, с помощью шариков. Тогда второй кривошип 9 должен быть связан с вторым шатуном 8 посредством цилиндрического шарнира 3 (фиг, 4).
При вьшолнении ведущего звена в виде ползуна 14, установленного на стойке 1 с возможностью возвратно-поступательного перемещения, он должен быть связан с рычагом 4 посредством цилиндрического шарнира 3 промежуточного поводка 15 и сферического шарнира 7 (фиг. 7-12)„
Механизм работает следующим обра- зом.
От ведущего звена движение передается кинематически связанному с ним рычагу 4. Движение рычага 4 посредством кинематически связанных с ним шатунов 5 и 8 передается кинематически связанным с ними соответствующим кривошипам 6 и 9, установленным на стойке I с возможностью вращения.
Форму л а изобретения
Кривошипно-ползунный механизм, содержащий ползун кинематически связанные с ним рычаг и стойку и установленные на стойке с возможностью вращения два кривошипа, кинематически связанные с рычагом посредством соответствующих шатунов, о т л-и ч а ю- щ и и с я тем, что, с целью повьш1е- ния надежности, ползун связан со стойкой и рычагом посредством кинематических пар, сумма степеней свободы которых равна пяти, первый кривошип связан с рычагом и первым шатуном посредством кинематических пар, сумма степеней свободы которых равна двум, а второй кривошип связан с рычагом и вторым шатуном посредством кинематических пар, сумма степеней свободы которых равна пяти.
//
Фиг2
№
puff4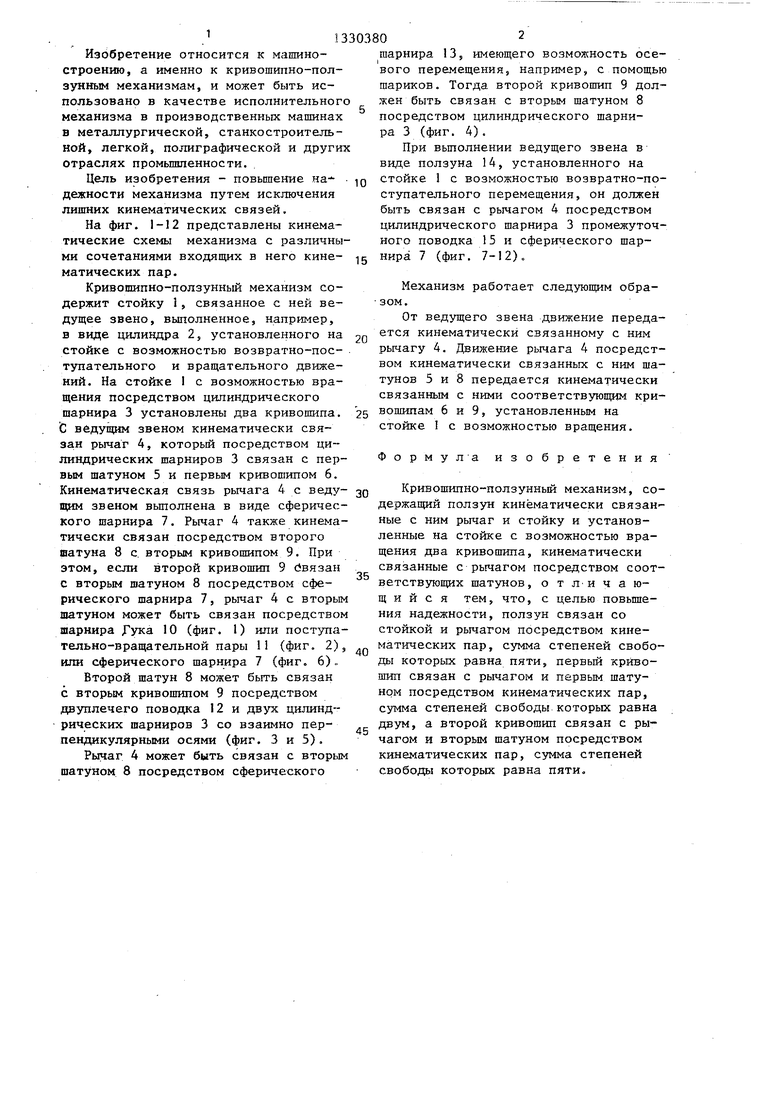
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный механизм | 1986 |
|
SU1330379A1 |
| Кривошипно-ползунный механизм | 1986 |
|
SU1330378A1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2014 |
|
RU2568159C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2015 |
|
RU2609848C2 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
Изобретение относится к машиностроению, а именно к кривошипно-пол- зунным механизмам. Цель изобретения - повьппение надежности механизма путем исключения лишних кинематических связей. Механизм содержит стойку 1, размещенные на ней ведущее звено, кинематически связанньш с ним рычаг 4, два кривошипа 6 и 9, установленные на стойке 1 с возможностью вращения и кинематически связанные с рычагом 4 посредством соответствующих шатунов 5 и 8. Причем кинематические пары, связывающие элементы механизма, могут быть выполнены в виде поступательной, вращательной, цилиндрической и сферической пар. При этом сумма степеней свободы кинематических пар, посредством которых ведущее звено связано со стойкой 1 и рычагом 4, должна быть равна пяти: первый кривошип 6 связан с шатуном 5 и рычагом 4 - сумма должна быть равна двум; второй кривошип 9 связан с вторым шатуном 8 и рычагом 4 - сумма должна быть равна пяти. Движение ведомого звена передается рычагу 4, который посредством шатунов 5 и В приводит во вращение кривошипы 6 и 9. 12 ил. (О (Л С ю 00 00 о 00 00 fft/et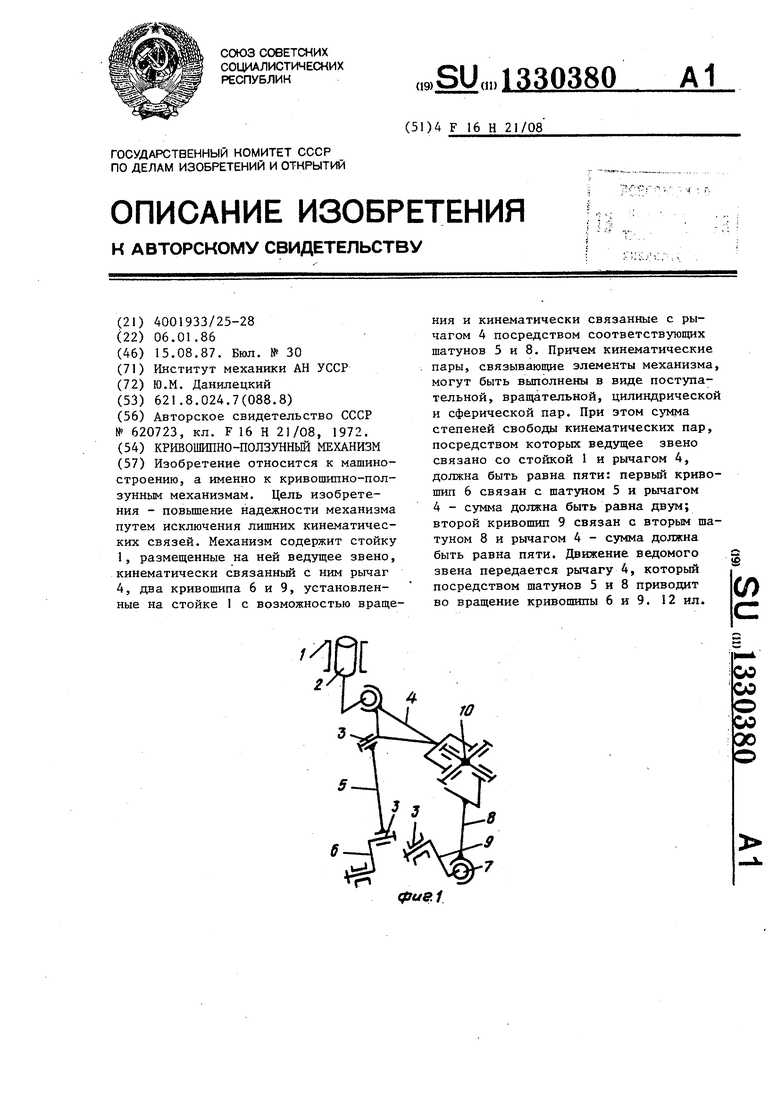
7f
8
фаз. 5
фигб
го
71
tpuff.e
w
{puff. 9
/5 7
Г5
(fJu&fO
(fju&ff
cpus. 12
Составитель A. Жук Редактор Э. Слиган Техред В.Кадар
Заказ 3564/38 Тираж 811Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор В. Гирняк
| Шатунно-кривошипный механизм с регулируемым ходом ползуна | 1972 |
|
SU620723A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
