Изобретение относится к машиностроению, а именно к кривошипно-ша- тунным механизмам, и может быть использовано в качестве исполнительного механизма в производственных машинах в металлургической, станкостроительной, полиграфической и других отраслях промышленности.
Цель изобретения - повьшение надежности механизма путем исключения лишних кинематических связей.
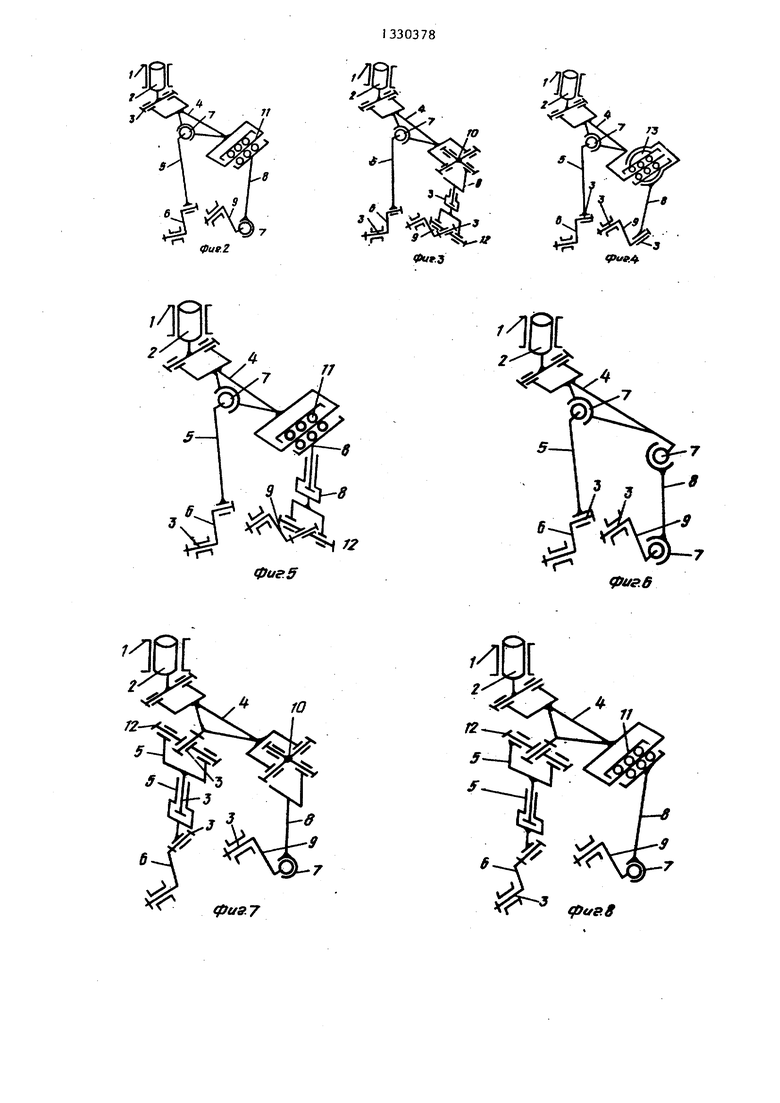
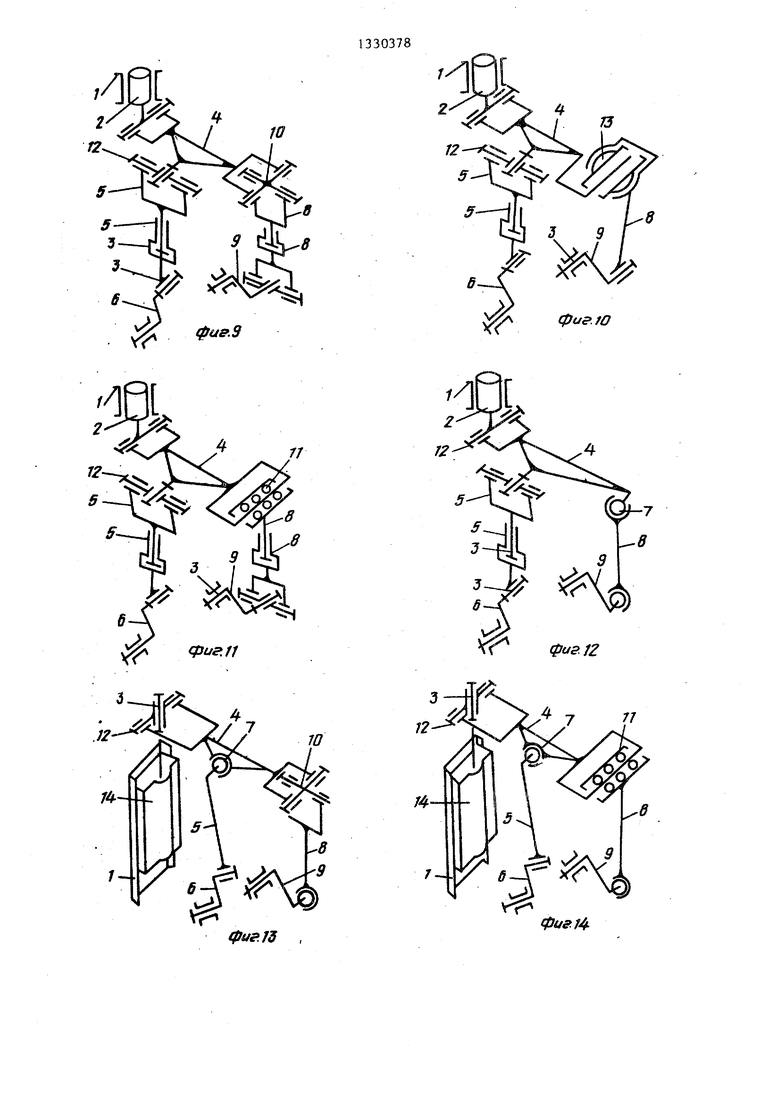
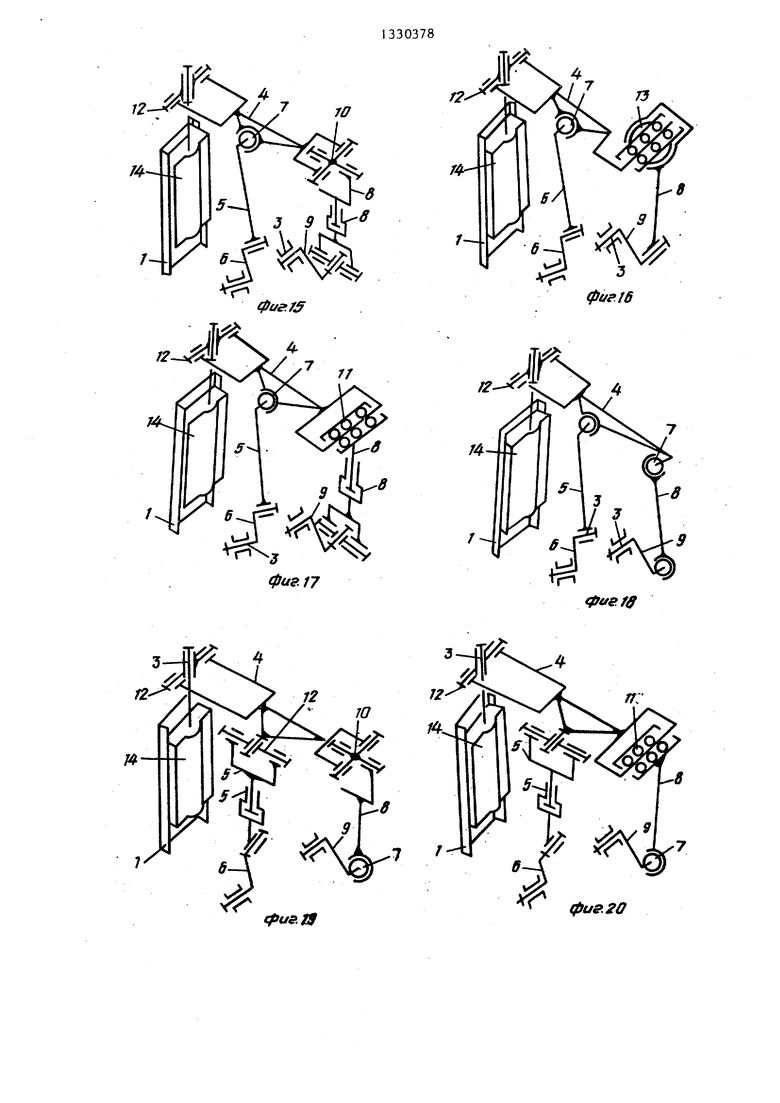
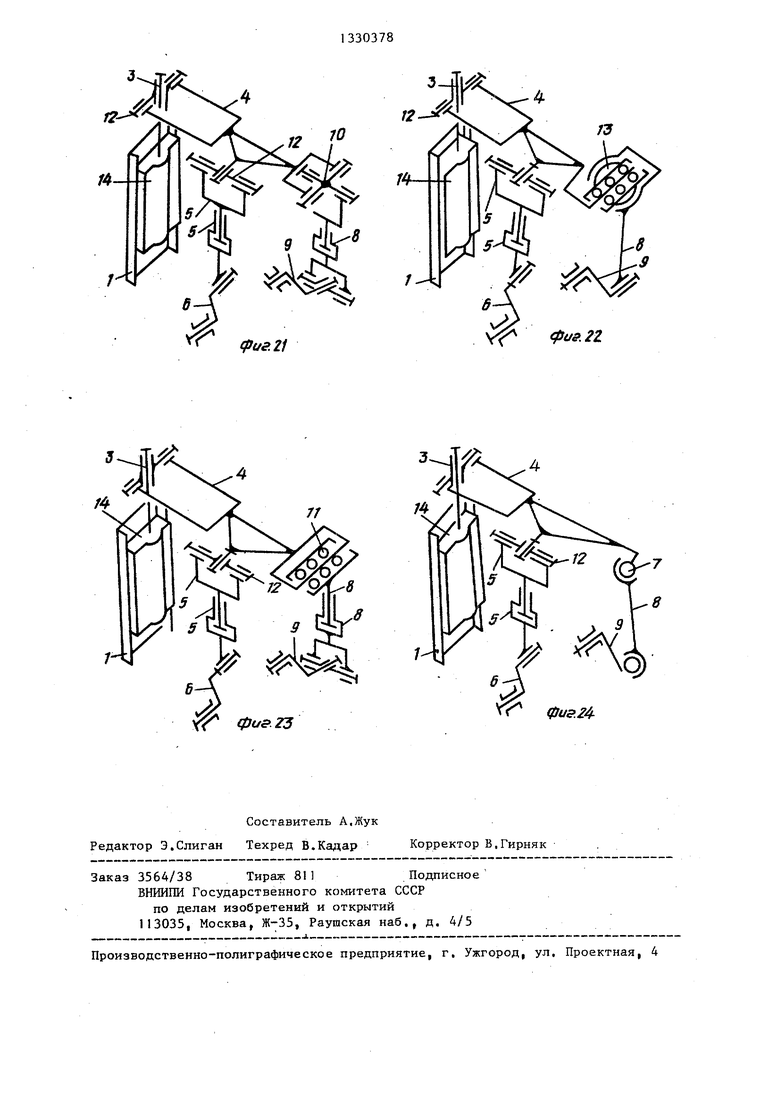
На фиг. 1-24 представлены кинематические схемы механизма с различными сочетаниями входящих в него ки нематических пар.
Кривошипно-ползунный механизм содержит стойку 1, связанное с ней ведущее звено, выполненное в например в виде цилиндра 2, установленного на стойке с возможностью вращательного и возвратно-поступательного движений С ведомым звеном при помощи цилиндрического шарнира 3 связан рычаг 4, С рычагом 4 посредством первого шатуна 5 связан первый кривошип 6, установленный на стойке с возможностью вращения посредством цилиндрического шарнира 3, Первый шатун 5 связан с рычагом 4 посредством, например, сферического шарнира 7, Второй шатун 8 связывает установленный на стойке с возможностью вращения при помощи цилиндрического шарнира 3 второй кривошип 9 с рычагом 4 посредством, например, шарнира Гука 10 или по- ступательно-вр ательной пары 1 1 (фиг,2.) .
Второй кривошип 9 может быть связан с вторым шатуном 8 при помощи сферического шарнира 7, или при помощи двуплечего поводка 12 и двух цилиндрических шарниров 3 с взаимно перпендикулярными осями (фиг,3 и 5),
Второй шатун 8 может быть связан с рычагом 4 посредством сферического шарнира 13, имеющего возможность осевого перемещения. Тогда второй кривошип 9 должен быть связан с вторым шатуном 8 цилиндрическим шарниром 3 (фиг.4).
Если второй шатун 8 связан с рычагом 4 сферическим шарниром 7, то и второй кривошип 9 должен быть связан с шатуном 8 сферическим шарниром 7 (фиг.6).
5
0
5
0
5
0
5
0
5
Первый шатун 5 может быть связан с рычагом 4 посредством двуплечего поводка 12 и цилиндрического шарнира 3j оси вращения которых перпендикулярны друг другу, при этом ось цилиндрического шарнира 3, соединяющего первый шатун 5 с цилиндрическим шарниром 3 первого кривошипа 6, должна быть параллельна оси двуплечего поводка 12 (фиг. 7-12),
При вьшолнении ведущего звена в виде ползуна 14, размещенного в стойке 1 с возможностью возвратно-поступательного перемещения, он должен быть связан с рычагом 4 посредством цилиндрического шарнира 3 и двуплечего поводка 12, оси вращения которых перпендикулярны друг другу (фиг.12- 24).
Механизм работает следующим образом. I
От ведущего звена движение передается кинематически связанному с ним рычагу 4, Движение рычага 4 посредством кинематически связанных с ним первого 5 и второго 8 шатунов передается кинематически связанным с последними соответственно первому 6 и второму 9 кривошипам, установленным на стойке 1 с возможностью вращения .
Формула изобретения
Кривошипно-ползунный механизм, содержащий ползун 6 кинематически связанные с ним рычаг и стойку и установленные на ней с возможностью вращения два кривошипа, кинематически связанные с рычагом посредством соответствующих шатунов, отличающийся тем, что, с целью повышения надежности, ползун связан с рычагом и стойкой посредством кинематических пар, сумма степеней свободы которых равна трем, первый кривошип связан с рычагом и первым шатуном посредством кинематических пар, сумма степеней свободы которых равна четы- реМ( а второй кривошип связан с рычагом и вторым шатуном посредством кинематических пар, сумма степеней свободы которых равна пяти.
0Uf.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-ползунный механизм | 1986 |
|
SU1330379A1 |
| Кривошипно-ползунный механизм | 1986 |
|
SU1330380A1 |
| Пространственный рычажный механизм с периодическими остановками | 1985 |
|
SU1307134A1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
Изобретение относится к машиностроению, а именно к кривошипно-пол- зунным механизмам. Цель изобретения - повыгаение надежности за счет исключения лишних кинематических связей. Механизм содержит стойку 1, размещенные на ней ведущее звено, кинема- тическй связанный с ним рычаг 4, два кривошипа 6 и 9, установленные с возможностью вращения на стойке I и кинематически связанные с рычагом 4 посредством соответствующих шатунов 5 и 8. Причем кинематические пары, связывающие элементы механизма, могут быть выполнены в виде поступательной, вращательной, цилиндрической и сферической пар. Но при этом сумма степеней свободы кинематических пар, посредством которых ведущее звено связано с рычагом 4, должна быть равна трем,- первый кривошип 6 связан с первым шатуном 5 и рычагом 4.- сумма должна быть равны четырем; второй кривошим 9 связан с вторым шатуном 8 и рычагом 4 - сумма должна быть равна пяти. Движение ведомого звена передается рычагу 4, который посредством шатунов 5 и 8 приводит во вращение кривошипы 6 и 9. 24 ил. (Л / Л7 оо СА) О СО 00 %фие.1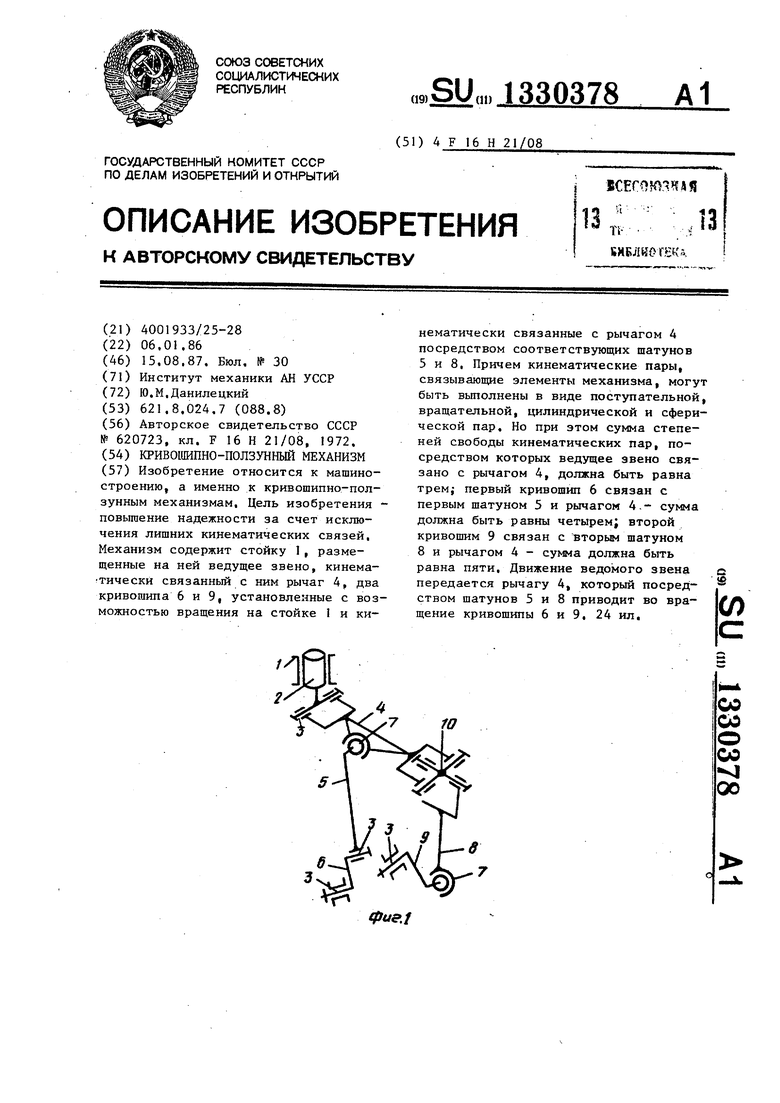
7/
фиг.5
;
tfff.S
Ю
фи9.7
фа&в
W
.
rp.
, .ЙЙ
фае.З
8
. to
фигл
70
фиг. IS
лп.
/
v
фа г 14. .
ro
/4-4
1330378
.v/ .
фаг I 6
tpu9,J9
фи&.го
10
/
(риг.Ц
/J
//
/-%
7-t
Составитель А.Жук Редактор Э.Слиган Техред В.Кадар Корректор В.Гирняк
Заказ 3564/38 Тираж 811Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Шатунно-кривошипный механизм с регулируемым ходом ползуна | 1972 |
|
SU620723A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
