113
Изобретение относится к машиностроению, а именно к пространственным рычажным механизмам, и может быть использовано в автоматах, рабочие органы которых совершают возвратные движения с периодическими остановками в крайних положениях.
Целью изобретения является расширение кинематических возможностей механизма путем обеспечения двух остановок ведомого звена в крайних по - ложениях за один оборот ведущего кривошипа.
На фиг. 1 изображена кинематическая схема предлагаемого механизма; на фиг. 2 - то же, вариант выполнения звеньев механизма.
Пространственный рычажный механизм с периодическими остановками содержит четырехзвенник, включающий веду- щий кривощип 1 и стойку 2, соединенные с помощью вращательной пары 3, щатун 4, соединенный с ведущим кривошипом 1 с помощью сферического шарнира 5, и коромысло 6, образующее со стойкой 2 цилиндрическую пару 7, а с шатуном 4 - вращательную пару 8. При этом ось пары 7 перпендикулярна оси пары 8 и оси вращения ведущего криво- щипа 1 и лежит в одной плоскости с последней. С коромыслом 6 четырехзвен ника кинематически связан поводковый элемент, выполненный в виде рычага 9, образующего со стойкой вращательную пару 10. Рычаг 9 соединен с коро- мыслом 6 посредством дополнительного шатуна 11, соединенного с коромыслом 6, и подводковым элементом при помощи сферических щарниров 12 и 13 соответственно. При выполнении поводкового элемента в виде рычага 9 его ось вращения параллельна плоскости осей вращения кривошипа 1 и пары 7, При выполнении поводкового элемента в виде ползуна 14, его ось перпендикулярна плоскости осей вращения кривошипа 1 и пары 7.
Механизм работает следующим образом.
При вращении ведущего кривошипа 1 любая точка коромысла 6, например центр А сферического шарнира 12, описывает замкнутую седлообразную траекторию ACAj) А -ЛД-АТ-А AS - А - АЗ - А2(А)А. При этом траектория точки А симметрична относительно прямых, соединяющих точки АвИА4, А(,и ACAj).
5
5
1
5
0
0
5
0
5
34 2
Дополнительный шатун 11, соединяющий коромысло 6 с поводковым элементом, приводит последний в возвратное качательное движение (если поводковый элемент выполнен в виде кривошипа) или в возвратно-поступательное движение (если поводковый элемент выполнен в виде ползуна).Центр Б сферического шарнира 13 совершает остановки в точках ,-, В-,) и
,, БЗ).
Параметры механизма можно выбрать так, что точность приближенных остановок (точки Б, В, и Б и Вд) не будет превышать 3% величины хода поводкового элемента. Формула изобретения
1,Пространственный рычажный механизм с периодическими остановками, содержатели четырехзвенник, состоящий из стойки, связанного с ней с образованием врап1ательной пары ведущего кривошипа и соединенного с ним посредством шатуна ведомого звена,включающего Коромысло, связанное с образованием цилиндрической пары со стойкой, отличающийся тем, что, с целью расширения кинематических возможностей путем обеспечения двух остановок ведомого звена в крайних положениях за один оборот ведущего кривошипа, он снабжен поводковым элементом и дополнительным шатуном, имеющим на концах сферические шарниры, один из которых соединен -с поводковым элементом, а другой - с коромыслом, конец последнего связан с образованием вращательной пары с шатуном, соединение которого с ведущим кривошипом выполнено в виде сферического шарнира, а ось вращения пары коромысло - стойка перпендикулярна оси вращения пары коромысло - шатун и оси вращения ведущего кривощи- па и лежит в одной плоскости с последней.
2,Механизм по п. 1, о т л и ч а- ю щ и и с я тем, что поводковьш элемент выполнен в виде рычага, ось вращения которого параллельна плоскости осей вращения ведущего кривошипа и коромысла.
3,Механизм по п. 1, о т л и ч а- ю щ и и с я тем, что поводковый элемент выполнен в виде ползуна, ось которого перпендикулярна плоскости осей вращения ведущего кривошипа и коромысла ,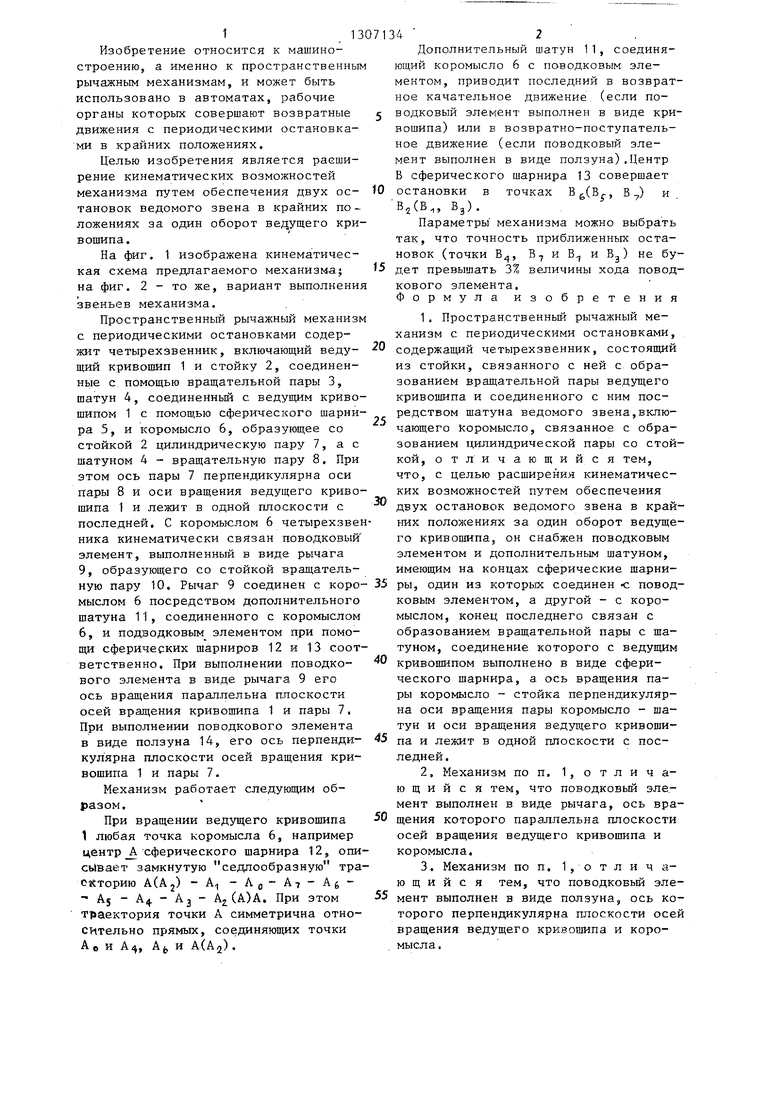
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный регулируемый рычажный механизм | 1986 |
|
SU1315696A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Пространственный рычажный механизм с периодическими остановками | 1991 |
|
SU1809209A1 |
| Зубчато-рычажный механизм с остановками | 1987 |
|
SU1599606A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |

Изобретение относится к машиностроению, а именно к пространственным рычажным механизмам. Цель изобретения - расширение кинематических возможностей механизма путем обеспечения двух остановок ведомого звена. Механизм содержит ведущий кривошип 1 и стойку 2, образунмдие вращательную пару 3, Кривошип 1 посредством сферического шарнира 5 соединен с шатуном 4, входяш им другим своим концом во вращательную пару 8 с коромыслом 6, которое входит в цилиндрическую пару 7 со стойкой 2, Ось пары 7 перпендикулярна оси пары 8 и оси пары 3 и лежит в одной плоскости с последней. Коромысло 6 соединено посредством сферического шарнира 12 с дополнительным шатуном 115 другой конец которого связан сферическим шарниром 13 с поводковым элементом, выполненным в виде рычага 9 либо ползуна. Ось ползуна перпендикулярна плоскости осей пар 3 и 8, а ось вращения рычага 9 параллельна- этой плоскости. При вращении ведзпцего кривошипа 1 поводко- вьй элемент совершает две остановки в крайних положениях за один оборот кривошипа 1. Продолжительность остановок определяется параметрами механизма. 2 з.п. ф-лЫу 2 ил. S (Я со О СО 4 /%; (es,)Ss ,(e,,ei го .1
Редактор Ю.Середа
Заказ 1610/33Тираж 812Подписное
ВНРШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Составитель А,Жук Техред Л.Сердюкова
Корректор С.Шекмар
| Кожевников С.Н | |||
| и др | |||
| Механизмы, М.: Машиностроение, 1976, с | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
