1
Изобретение относится к автоматическим устройствам для разделения или сортировки разногабаритных предметов из хаотического многорядного потока предметов с потактовой их выдачей по одному и может найти применение в технологических линиях обработки штучных грузов, например почтовых посылок.
Цель изобретения - повышение эффективности путем повышения быстродействия работы автомата.
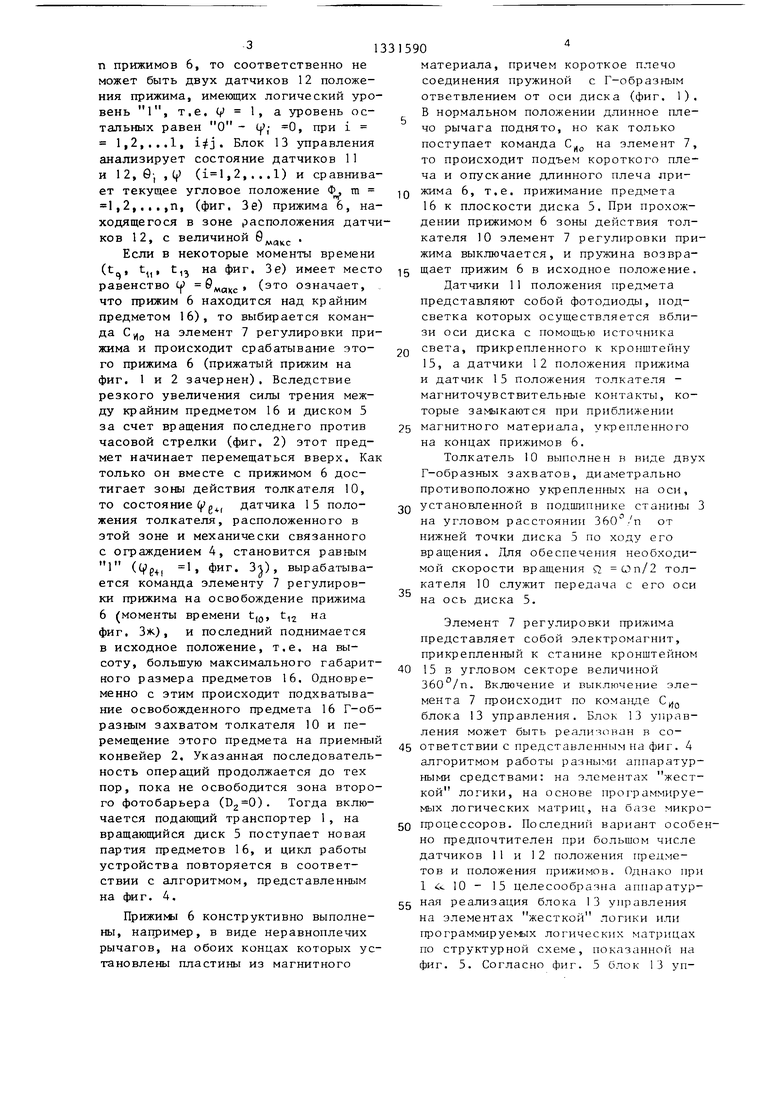
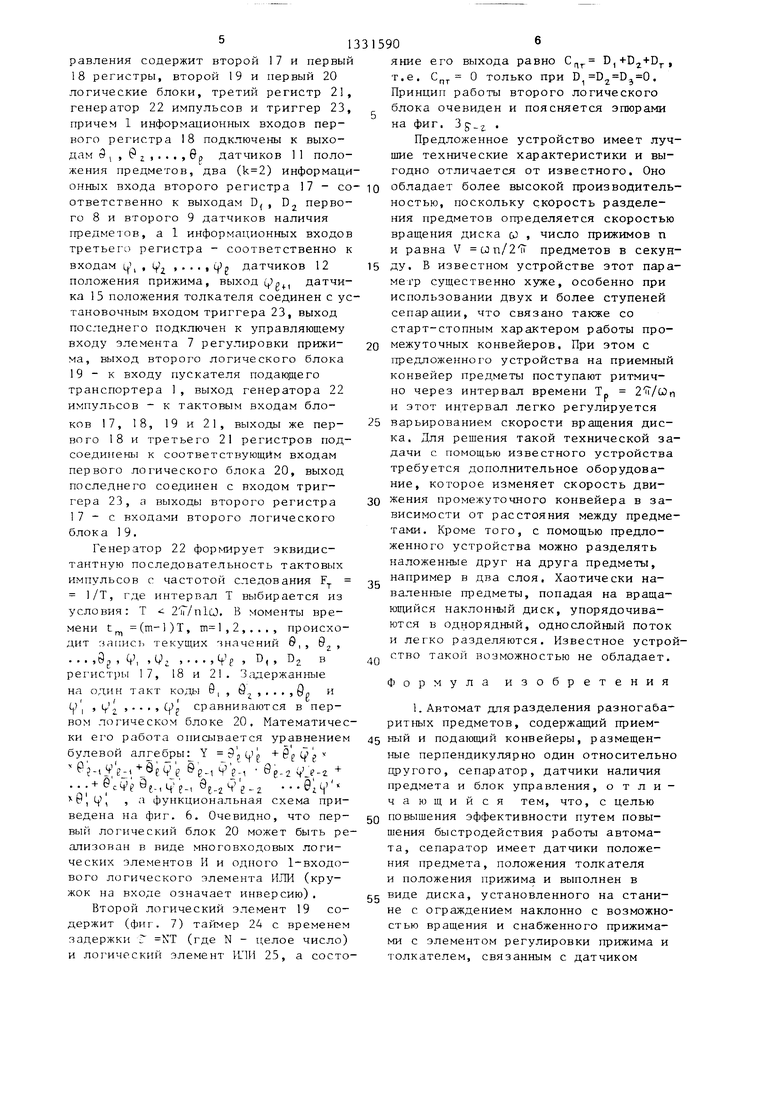
На фиг. 1 схематично изображено предложенное устройство с частичным вырезом стенки ограждения, общий вид; на фиг.2 - вид А на фиг. 1; на фиг. 3 - эпюры входных и выходных сигналов датчиков; на фиг. 4 - алгоритм работы блока управления; на фиг. 5 - его структурная схема; на фиг. 6 - функциональная с;хема первого логического блока; на фиг. 7 - структурная схема второго логического блока,
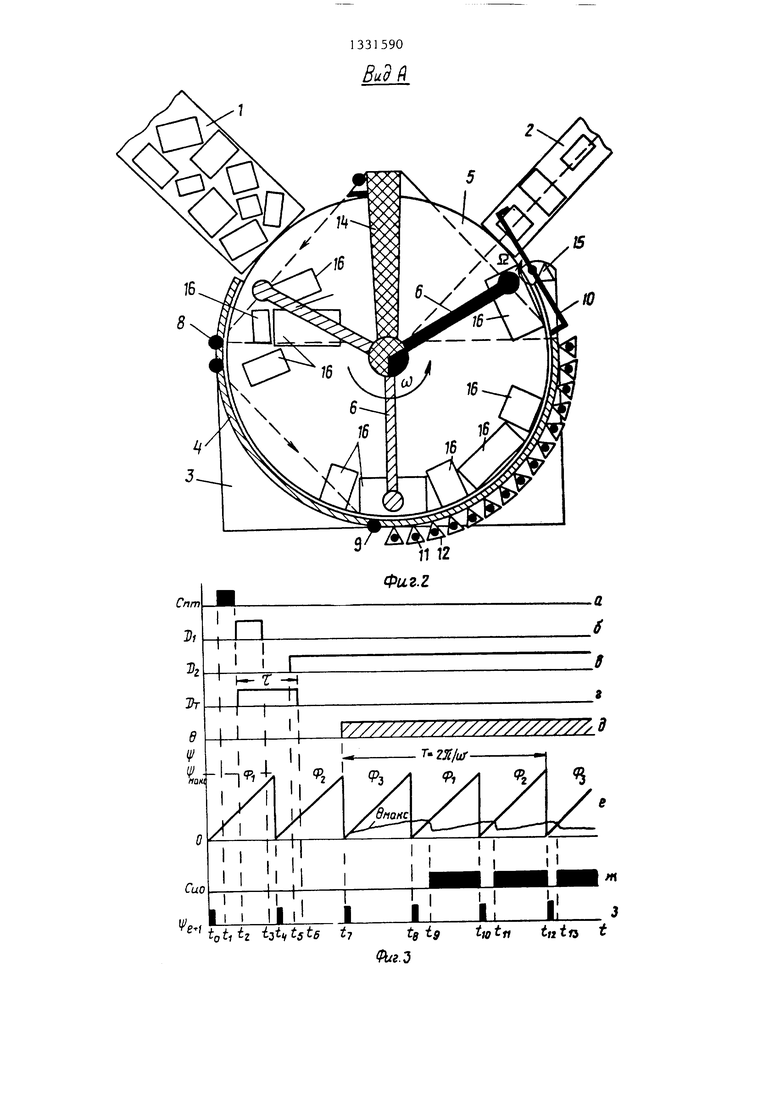
Устройство для разделения разногабаритных предметов содержит подающий 1 и приемный 2 конвейеры, станину 3, ограждение 4, диск 5, прижимы 6, элемент 7 регулировки
прижима, k датчиков наличия предметов (в рассматриваемом примере , первый 8 и второй 9 датчики), толкатель 10 датчиков 11 положения предметов, 1 датчиков 12 положения при- жима, блок 13 управления, кронштейн 14 и датчик 15 положения толкателя.
Устройство работает следующим образом.
В момент tg его включения диск 5 вместе с установленными на нем п прижимами 6 (), которые первоначально отжаты, начинает вращаться с постоянной угловой скоростью а и приводит в движение толкатель 10,
представляющий собой два Г-образных захвата, диаметрально противоположн прикрепленных к оси, которая установлена в подшипнике станины 3 перпендикулярно плоскости диска 5. Ско рость вращения толкателя 10 равна Q COn/2, причем при прохождении любого из прижимов 6 вблизи оси толкателя 10 его Г-образные захваты находятся на касательной диску 5. По- дающий транспортер 1 с хаотически расположенными предметами 16 в этот момент включен. Логические состояния датчиков наличия предметов 8 и
1331590
0
Q
с, 25
30
35
40 45
50 gg
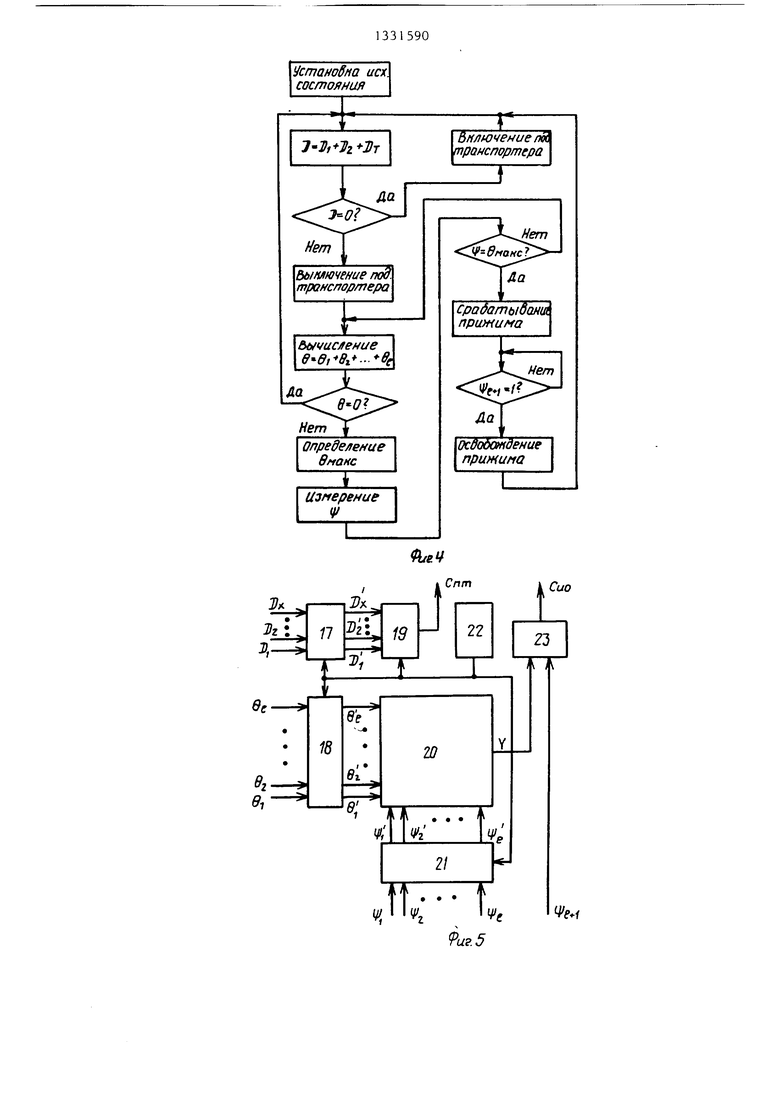
равны О (соответственно фотобарьеры открыты) , поэтому происходит включение подающего транспортера 1 в момент времени t, (фиг. 3q). Он будет работать до Момента времени t, пока первая партия предметов 16 не свалится на диск 5 и не пересечет первый фотобарьер (состояние датчика 8 D,1, фиг. 35).
При попадании предметов 16 на вpaщaюш йcя наклонный диск 5 за счет сложного взаимодействия силы тяжести, центробежной силы, силы трения между предмета1-1и 16 и диском 5, а также силы трения между предметами 16 и ограждением 4 происходит их перемещение вниз по ходу вращения дис ка. При пересечении первого фотобарьера подающий транспортер 1 выключается (фиг. За) и на время включается таймер () блока 13 управления. Величина Т выбирается таким образом, чтобы не допустить повторного включения подающего транспортера 1, когда предметы 16 уже прошли первый фотобарьер (момент времени t на фиг. 35), но еще не достигли второго фотобарьера (состояния датчиков 8 и 9 наличия предметов соответственно равны: D,). В момент времени ty предметы 16 достигают второго фотобарьера, состояние Dj датчика 9 становится равным (фиг. 3&), и только после этого (t ty) на выходе D таймера появляется сигнал логического О. В отрезок времени t , t-j.J предметы 16 находятся в зоне второго фотобарьера (), но еще не достигли самого нижнего положения диска 5. Поэтому логические состояния датчиков 11 положения предметов равны: 0, б .,., а их логическая сумма
0 JI-Qj 0 (фиг. ЗЭ) . Как только в момент времени t первый из предметов 16 пересечет самую нижнюю точку диска 5, то 6 1, а в блоке 13 управления вычисляется значение 9 его углового положения.
В секторе ограждения 4 с максимальным угловым размером U 360°/п от нижней точки диска 5 по ходу его вращения параллельно над 1 датчиками 11 положения предметов установлены 1 датчиков 12 положения прижима. Поскольку в любой момент времени в секторе величиной („„кс не может находиться более одного из
макс
31
n прижимов 6, то соответственно не может быть двух датчиков 12 положения прижима, имеющих логический уровень 1, т.е. V 1, а уровень остальных равен О - С,- 0, при i 1,2,..., . Блок 13 управления анализирует состояние датчиков 11 и12, б-, ,tf) (,2,...1)и сравнивает текущее угловое положение Ф, m 1,2,...,п, (фиг. Зе) прижима 6, находящегося в зоне расположения датчиков 12, с величиной 0
Если в некоторые моменты времени (t , t,, t, на фиг. Зе) имеет место равенство ( махс (это означает, что прижим 6 находится над крайним предметом 16), то выбирается команда С у|д на элемент 7 регулировки прижима и происходит срабатывание этого прижима 6 (прижатый прижим на фиг. 1 и 2 зачернен). Вследствие резкого увеличения силы трения между крайним предметом 16 и диском 5 за счет вращения последнего против часовой стрелки (фиг. 2) этот предмет начинает перемещаться вверх. Как только он вместе с прижимом 6 достигает зоны действия толкателя 10, то состояние ( датчика 15 положения толкателя, расположенного в этой зоне и механически связанного с ограждением 4, становится равным 1 (Vg+i фиг. ЗО, вырабатывается команда элементу 7 регулировки прижима на освобождение прижима 6 (моменты времени t,o, t,2 на фиг. 3.), и последний поднимается в исходное положение, т.е. на высоту, большую максимального габаритного размера предметов 16. Одновременно с этим происходит подхватывание освобожденного предмета 16 Г-об- разным захватом толкателя 10 и перемещение этого предмета на приемный конвейер 2. Указанная последовательность операций продолжается до тех пор, пока не освободится зона второго фотобарьера (). Тогда включается подающий транспортер 1, на вращающийся диск 5 поступает новая партия предметов 16, и цикл работы устройства повторяется в соответствии с алгоритмом, представленным на фи г. 4.
Прижимы 6 конструктивно выполнены, например, в виде неравноплечих рычагов, на обоих концах которых установлены пластины из магнитного
0
материала, причем короткое плечо соединения пружиной с Г-образным ответвлением от оси диска (фиг. 1). В нормальном положении длинное плечо рычага поднято, но как только поступает команда С, на элемент 7, то происходит подъем короткого плеча и опускание длинного плеча лрижима 6, т.е. прижимание предмета 16 к плоскости диска 5. При прохождении прижимом 6 зоны действия толкателя 10 элемент 7 регулировки прижима выключается, и пружина возвращает прижим 6 в исходное положение.
Датчики 11 положения предмета представляют собой фотодиоды, подсветка которых осуществляется вблизи оси диска с помощью источника
света, прикрепленного к кронштейну 15, а датчики 12 положения прижима и датчик 15 положения толкателя - магниточувствительные контакты, которые замыкаются при приближении
магнитного материала, укрепленного на концах прижимов 6.
Толкатель 10 выполнен в виде двух Г-образных захватов, диаметрально противоположно укрепленных на оси,
установленной в подшипнике станины 3 на угловом расстоянии 360,/п от нижней точки диска 5 по ходу его вращения. Для обеспечения необходимой скорости вращения Q соп/2 толкателя 10 служит передача с его оси
на ось диска 5.
Элемент 7 регулировки прижима представляет собой электромагнит, прикрепленный к станине кронштейном
15 в угловом секторе величиной
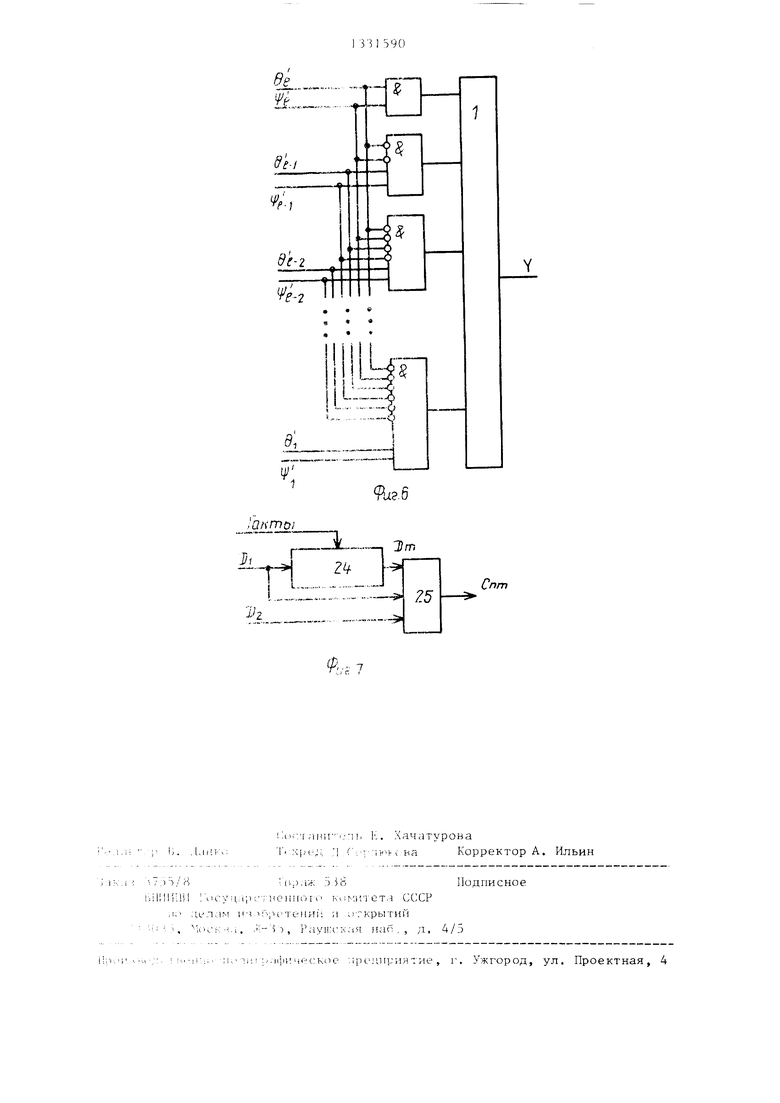
360°/п. Включение и выключение элемента 7 происходит по комаьаде С, блока 13 управления. Блок 13 управления может быть реализован в соответствии с представленным на фиг. 4 алгоритмом работы разны п аппаратурными средствами: на элементах жесткой логики, на основе программируемых логических матриц, на базе микропроцессоров. Последний вариант особенно предпочтителен при большом числе датчиков 11 и 12 положения предметов и положения прижимов. Однако при 1 t 10 - 15 целесообразь а аппаратурная реализация блока 13 управления на элементах жесткой логики или программируемых логических матрицах по структурной схеме, показанной на фиг. 5. Согласно фиг. 5 блок 13 упFT
г
равления содержит второй 17 и первый
18регистры, второй 19 и первый 20 логические блоки, третий регистр 21, генератор 22 импульсов и триггер 23, причем 1 информационных входов первого регистра 18 подключены к выходам 9 I , 0 , . . . , 6р датчиков 11 положения предметов, два () информационных входа второго регистра 17 - со ответственно к выходам D, D первого В и второго 9 датчиков наличия предметов, а 1 информационных входов третьего регистра - соответственно к
входам 1|- . Vz « датчиков 12 положения прижима, выход Q p., датчика 15 положения толкателя соединен с установочным входом триггера 23, выход последнего подключен к управляющему входу элемента 7 регулировки прижима, выход второго логического блока
19- к входу пускателя подающего транспортера 1, выход генератора 22 импульсов - к тактовым входам блоков 17, 1В, 19 и 21, выходы же первого 1В и третьего 21 регистров подсоединены к соответствующим входам первого логического блока 20, выход последнего соединен с входом триггера 23, а выходы второго регистра
17 - с входами второго логического блока 19,
Генератор 22 фop иpyeт эквидистантную последовательность тактовых импульсов с частотой следования 1/Т, где интервал Т выбирается из условия: Т - 2 |Г/п1и}, В моменты времени t (m-l)T, ,2,..,, происходит запись текущих значений б,, 0
. ..,9g , ф, ,С;, ,...,Vg , D, , D2 « рег истры 17, 18 и 21. Задержанные на один такт коды 0, , б , , . , , 9,, и () | , , . . . , () сравниваются в первом логическом блоке 20. Математически его работа описывается уравнением булевой алгебры: Y Э р( р , v e - QEVje е-1 t e-i е-г V -г + ...+ e cV; Qe-,. 9е-2Н г-2 0 , ц., , а функциональная схема приведена на фиг. 6. Очевидно, что первый логический блок 20 может быть реализован в виде многовходовых логических элементов И и одного 1-входо- вого логического элемента ИЛИ (кружок на входе означает инверсию),
Второй логический элемент 19 содержит (фиг. 7) Taf iMep 24 с временем задержки Г NT (где N - целое число) и логический элемент ЮИ 25, а состо
5
0
5
0
5
0
яние его выхода равно С , т.е. С О только при . Принцип работы второго логического блока очевиден и поясняется эпюрами на фиг. 3 g- .
Предложенное устройство имеет лучшие технические характеристики и выгодно отличается от известного. Оно обладает более высокой производительностью, поскольку скорость разделения предметов определяется скоростью вращения диска со , число прижимов п и равна V un/2 ii предметов в секунду. В известном устройстве этот параметр существенно хуже, особенно при использовании двух и более ступеней сепарации, что связано также со старт-стопным характером работы промежуточных конвейеров. При этом с предложенного устройства на приемный конвейер предметы поступают ритмично через интервал времени Тр 2 и/ип и этот интервал легко регулируется варьированием скорости вращения диска. Для решения такой технической задачи с помощью известного устройства требуется дополнительное оборудование, которое изменяет скорость движения промежуточного конвейера в зависимости от расстояния между предметами. Кроме того, с помощью предложенного устройства можно разделять наложенные друг на друга предметы, например в два слоя. Хаотически наваленные предметы, попадая на враща- ЮПЦ-1ЙСЯ наклонный диск, упорядочиваются в однорядный, однослойный поток и легко разделяются. Известное устройство такой возможностью не обладает.
Формула изобретения
1. Автомат для разделения разногабаритных предметов, содержащий прием45 ный и подающий конвейеры, размещенные перпендикулярно один относительн другого, сепаратор, датчики наличия предмета и блок управления, отличающийся тем, что, с целью
5Q повышения эффективности путем повышения быстродействия работы автомата, сепаратор имеет датчики положения предмета, положения толкателя и положения прижима и выполнен в
gg виде диска, установленного на станине с ограждением наклонно с возможностью вращения и снабженного прижимами с элементом регулировки прижима и толкателем, связанным с датчиком
положения толкателя, причем датчики положения предмета и датчики положения прижима установлены вдоль ограждения между нижней точкой диска и толкателем, а датчики наличия предмета установлены вдоль ограждени между подаюпщм конвейером и нижней точкой диска.
2. Автомат по п. 1,отличающий с я тем, что блок управления содержит регистры, логические блоки, генератор импульсов и триггер выход которого соединен с элементом регулирования прижима, а первый вход - с выходом первого логического блока, первые входы которого соединены с выходами первого регистра, первые входы которого связаны с выходами датчиков положения прижима, причем второй вход первого регистра соединен с выходом генератора импульсов, с первым входом второго логического блока и с первыми входами второго и третьего регистров, вторые входы которых связаны соответственно с выходами датчиков наличия предметов и датчиков положения предметов, при этом выходы второго регистра соединены с вторыми входами второго логического блока, выходом соединенного с входом включения подающего
транспортера, при этом выходы третьего регистра соединены со вторыми входами первого логического блока, а второй вход триггера связан с входом датчика положения толкателя.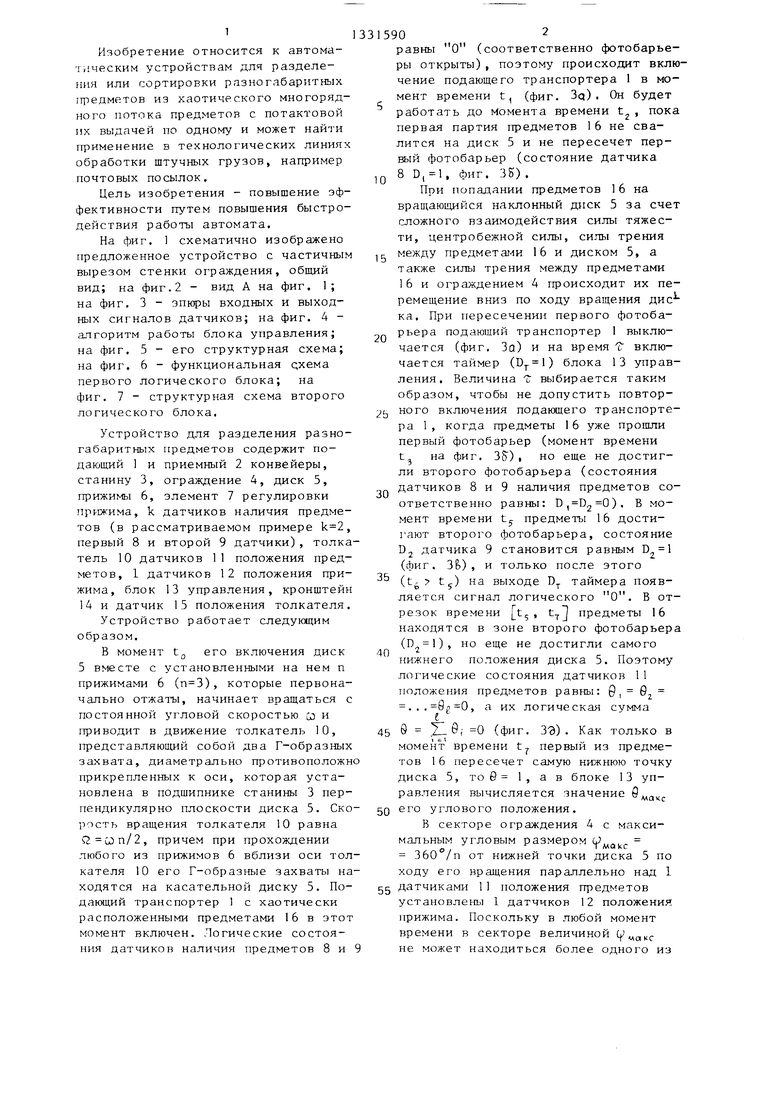
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разделения разногабаритных предметов | 1987 |
|
SU1443975A1 |
| Устройство для разделения разногабаритных предметов | 1987 |
|
SU1466813A1 |
| Устройство для разделения разногабаритных предметов | 1991 |
|
SU1818154A1 |
| РАЗДЕЛИТЕЛЬ РАЗНОГАБАРИТНЫХ ПРЕДМЕТОВ | 1994 |
|
RU2086313C1 |
| Устройство для счета яиц переносимых конвейером | 1985 |
|
SU1288731A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Роторный автомат | 1990 |
|
SU1717317A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ПОДАЧИ ИЗДЕЛИЙ | 2001 |
|
RU2207970C1 |
| Устройство для сортировки разнога-бАРиТНыХ пРЕдМЕТОВ | 1979 |
|
SU814486A1 |
| Автомат для резки глиняного бруса | 1980 |
|
SU961974A1 |
Изобретение относится к автоматам для разделения и сортировки разногабаритных предметов и позволяет повысить эффективность путем повышения быстродействия работы автомата. Автомат содержит подающий и приемный конвейеры и сепаратор, выполненный в виде станины с наклонно укрепленным на ней с т;озможяостьн:1 вр;щения диском, на оси которогс-) расположены прижимы. В нижне части станины диск имеет ограждение, в р;отором установле(пл фотолптчики уг рлвления подающим транспортером, датчики положения предметов и датчики положения прижима. В верх- Heii части станины находится сбрасы- (а гель, а на кронштейне укреплен исполнительиьп -i механизм п оижимо. При попадании предметов на диск сиг- нал1з1 датчиков обрабатываются в управляющем устройстве. В случае прохождения прижима над KpainiHM предметом происходит захват предмета и перемещение его в зону действия сбрасьпзателя. Последни осуществляет сбраоглвание предмета на прием1-а,п 1 KOHFsefiep. 1 ч. п. ф-шл, 7 ил. (/: с со оо ел со о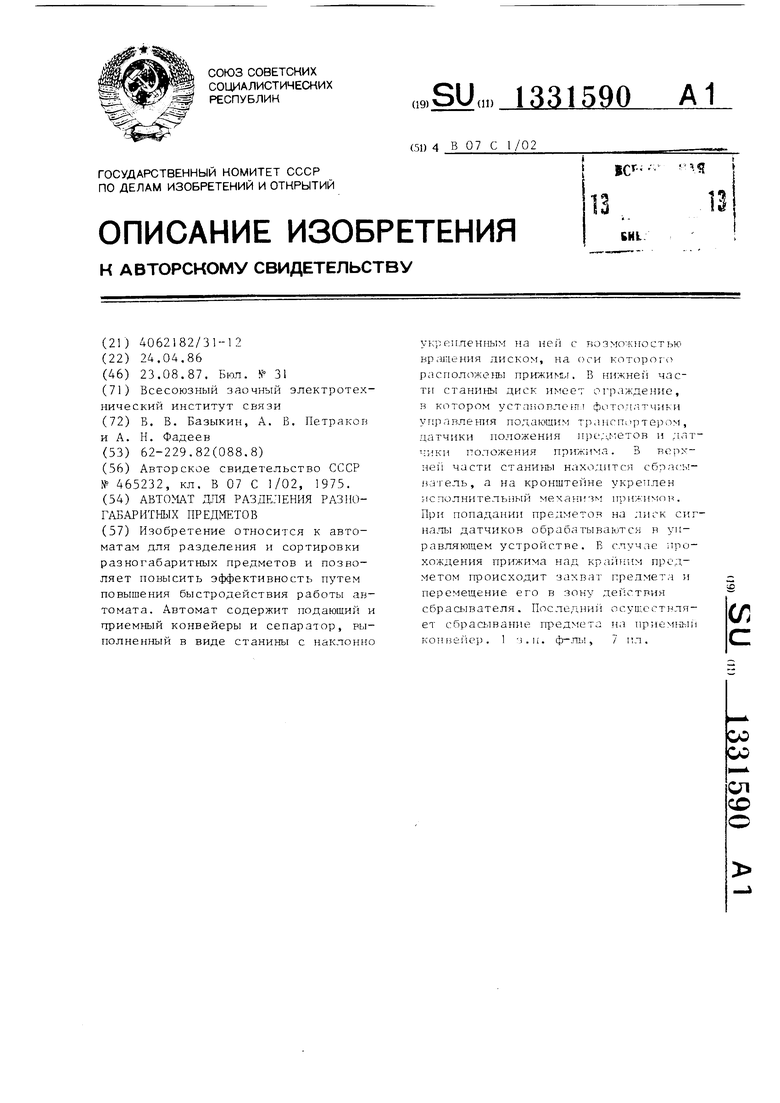
А/5
7 J
ФигЛ
BiiOfl
Ifr
I Y/////////////// //////7/ 3
I .-I
нам
Cuo
v.
tltgiat tnt,2tn t
г.З
JcmaHodHa исх. состояние
Hr
±
Ьмлючеииегт. транспортера
дыпяючение под. транспортера
срабатывшт npuwuMa
Ьычисление .
Ла
Нет
Определение GffOHc
изперение V
Осоооамдение npumufiQ
i д ; - | ;1и1Г -|;-1 ь I .. Хачатурова
:|- |- ; i Г-, v-ги V ьаКорректор А. Ильин
Подписное
MiV
иЬичнскос :ii)ejuiyия ие , г. Ужгород, ул. Проектная, 4
| Устройство для разделения штучных грузов | 1972 |
|
SU465232A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
