Изобретение относится к устройствам для разделения или сортировки разногабаритных предметов преимущественно в форме параллелепипеда из хаотического многорядного их потока и может найти применение в технологических линиях обработки штучных изделий, например почтовых посылок.
Цель изобретения - повышение надежности работы путем предотвращения проскальзывания предметов.
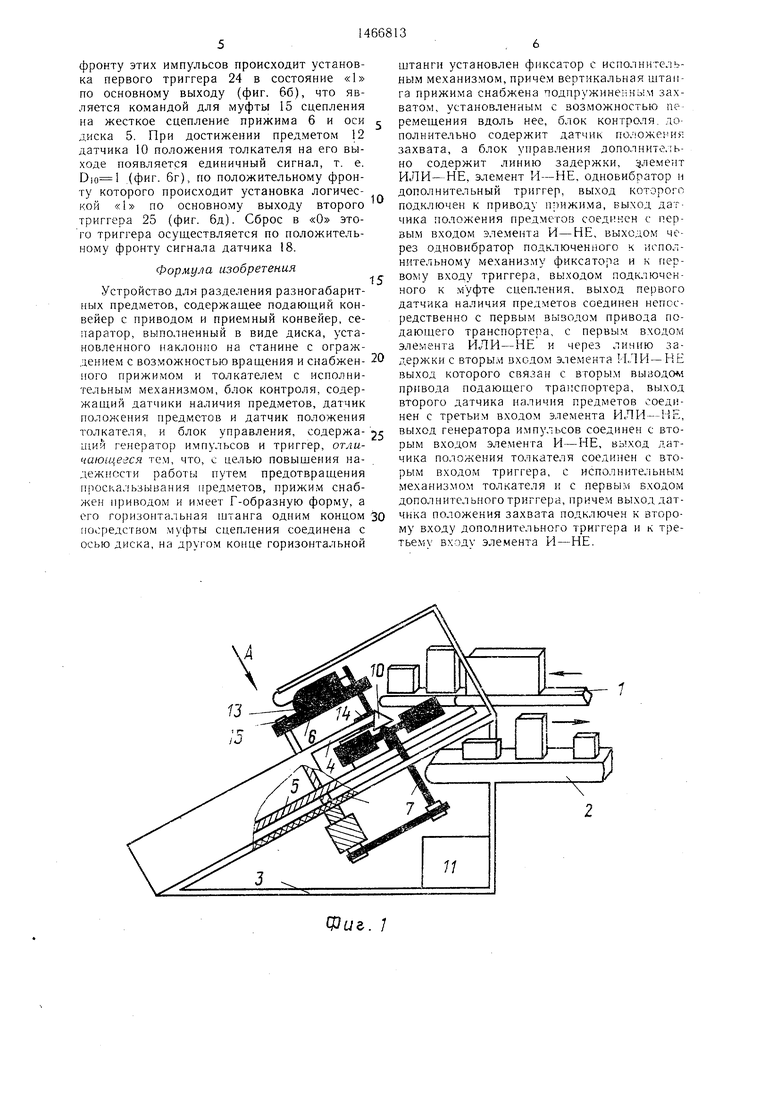
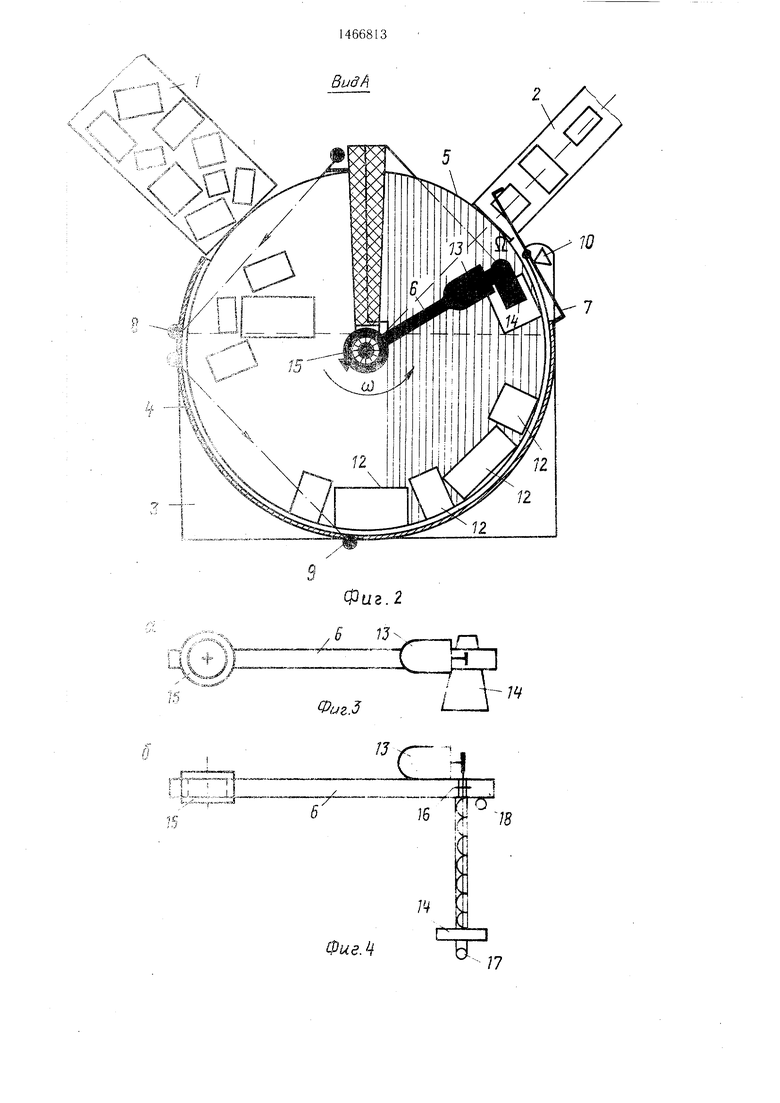
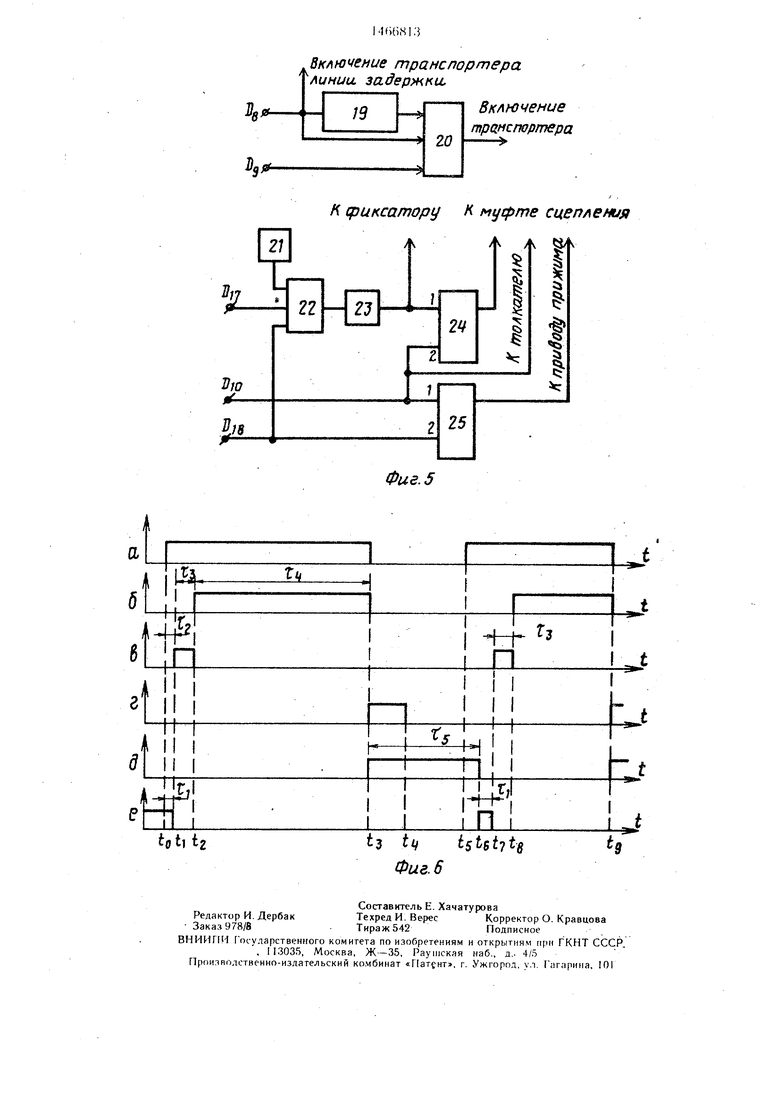
На фиг. 1 схематично изображено предлагаемое устройство, общий вид с частичным вырезом стенки ограждения,- на фиг. 2 - вид А на фиг. 1; на фиг. 3 - прижим, вид сверху; на фиг. 4 - то же вид сбоку; на фиг. 5 - функциональная схема блока управления; на фиг. 6 -
iaraJv
О.
2I 4
временные диаграммы, поясняюнгие npiiiiu .i.i j 0 работы устройства.
Устройство для разделения pa-norao; ритных предметов содержит подающш 1 с приводом (не показан) и приемный 2 коп вейеры, станину 3, ограждение 4, диск .) прижим 6, толкатель 7, первый 8 и второй 9 датчики наличия предметов, датчик 10 положения толкателя, блок 1 управления (фиг. 1 и 2) и предметы 12.
Прижим 6 содержит привод 13. захвпт А. муфту 15 сцепления, фиксатор 16 с iio иолнительным механизмом положения захвата, а также контактные датчики положения предметов 17 и захвата 18 (фиг. 3). Блок 11 управления содержит линию 19 задержки, логическую схему ПЛИ-НЕ 20. (фиг. 4), генератор 21 импульсов,
3
чсскую схему ИНЕ 22, ол 1ог ибратор
и первый 24 и вторсй 25 триггеры (фиг. 5).
Устройство работает следуюкиш образом.
В момент вклю И ния устро11ств ч диск 5 начинает )ран1аться с ностоиииой угловой скорост1 ю W. 11)и этом Г-образный прижим 6, свободно дви ун1ийся в заштрихованном секторе {ф ir. 2), под действием силы тяжести опускается вниз и останавливается в самой нижней точке. R исходном состоянии за.хват 14 фиксируется в самом верхнем полоЖ 1М1ии фиксатором 16, а толкатель 7 при этг;м устанавливается неподвижно по касателыюй к диску 5. Подающий транспортер с хаотически распо- ложенныр4и предметами в этот момент вь;- ключе, а логически состояния датчиков 8 и 9 1 аличия предметов равны 5улю i D8 ).
По нулевому си -налу 8 и 9 наличия предметов з блоке 11 управления на выходе логической гхемы ИЛИ-МЕ 20 формируется команда ия включение подающего транспортера . Он включается и первая партия предметов 12 сваливается на диск 5. после чего гго сигналу первого датчика 8 иали. предметов иодающий транспортер 1 выключается. При попадании предметов 12 на .вращающийся наклонный диск 5 за счет сложного нзапмодействия силы тяжести, центробежной силы, силы трения между предметами 12 и ограждением 4 происходит их переме 1ение вниз ЕГО ходу вращения диска. В результате взаимодействия всех рассмотренных сил предметы 12 упорядочиваются 1е 1одвнжно вдоль ограждения 4, причем крайний., из гфедметов 12 при оптимальном угле наклона диска а 20---30° располагается в «шжней части заштрихованной зоны и взаимодействует с вертикальной штангой прижима 6, на нижнем icoHne к.оторой находится контактный датчик 17 положения предмета.
Возможны два режима работы устройства: нетактйрованная и тактированная выдача предметов.
Б случае нетактированной выдачи предметов на выходе генератора 21 имнульсой устанавливается сигнал логической «1. и по сигналу Di7 (фиг. 6а) датчика 17 бло-к 1 управления вырабатывает-команды соответственно на исполнительный элемент фиксатора 16 (fjbnr. 6в) и муфту 15 сцепления (фнг. бб). В результате этого срабатывает подпружиненный захйат 14, а нри- жим 6 и ось диска 5 получают жесткое сцепление. Время задержки т выбирается так, что сцепление прижима 6 и оси диска 5 происходит после того как захват 14 прижимает предмет 2 к плоскости днска 5. За счет резкого увеличения силы снепления между предметом 12, поверхностью диска 5 и прижимом 6, а также за счет Bpania 1ельного движения последних по часовой сгрелке и)айний предмет 12 начинает не Н ме1цаться вверх но окружности.
14Г)6813
2С
25
30
40
15
0
5
Для уменьшения силы трения между захваченным предметом 12 и ограждением 4 последнее в зан1трихованном угловом секторе должно иметь форму не окружности, а эвольвенты, т. е. радиус ограждения должен уве- личнпаться. В момент времени t.i захваченный предмет 12 попадает в зону действия толкателя 7 и срабатывает датчик 10 положения толкателя. По его сигналу. Dm (фиг. 6г) блок i 1 управления вырабатывает команды на срабатывание привода 13 (фиг. 6д) и толкателя 7. Тогда цривод 13 производит возврат захвата 14 в исходное положение, а толкатель 7 получает сцепление с основным приводом диска 5 и соверпгает поворот на 180°, перемещая предмет 12 с диска 5 на прие.м-цый конвейер 2. После этого в муфте 15 нарушается жесткое сцепление оси диска 5 и прижима 6 и последний начинает свободное движение вниз до тех пор, пока не срабатывает контактный датчик 17 положения предмета. Тогда его состояние DU вновь оказывается равным единице, т. е. (момент времени . 6а), однако следующий цикл работы-не начинается до тех пор, пока состояние контактного датчика положения захвата 18 равно нулю, т. е. . Как только захват 14 возвращается в исходное состояние и оказывается зафиксированным в верхней точке, то DIR 1 (фиг. бе), и начинается следующий цикл работы.
Этот процесс повторяется до тех , .юка в зоне второго фотобарьера (фиг. S штрихпунктир) не останется ни одного пред- мета 12. Если это Происходит, то и блок 11 управления формирует команду 5 на включение подающего транспортера 1.
В режиме работы устройства с такти- рованноц выдачей предметов на выходе генератора 21 импульсов блока II управления формируется эквидистантная последовательность строб-импульсов, которые разре- прохождение сигналов датчиков 17 к 18 на выход схемы И-НЕ 22 в строго тактированные моменты времени. Вследствие .этого сепарация предметов 12 и их выдача на приемный конвейер 2 происходит тактированно, т. е. только в определенные эквидистантные моменты времени.
Принцип действия блока 11 управления следующий.
В исходном состоянии ( ) на выходах одновибратора 23 н триггеров 24 и 25 сигналы имеют уровень логического .«О. При контакте датчика 17 и крайнего предмета 12 состояние датчика 17 изменяется; т , е. . Тогда на выходе логической схемь И-НЕ 22. формируется сигнал ,логической «I и пЪ положительному фронту запускается ояно- вибратор 23, который формирует импульсы (фиг. Г)в) длительность тэ , управляющие работой фик сатора 16. По отрицательному
фронту этих импульсов происходит установка первого триггера 24 в состояние «1 по основному выходу (фиг. 66), что является командой для муфты 15 сцепления на жесткое сцепление прижима 6 и оси диска 5. При достижении предметом 12 датчика 10 положения толкателя на его вы- ход,е появляется единичный сигнал, т. е. (фиг. 6г), по положительному фронту которого происходит установка логичес- кой «1 по основному выходу второго триггера 25 (фиг. 6д). Сброс в «О этого триппера осуществляется по положительному фронту сигнала датчика 18.
Формула изобретения
15
Устройство для разделения разногабаритных предметов, содержащее подающий конвейер с приводом и приемный конвейер, сепаратор, выполненный в виде диска, установленного наклонно на станине с ограждением с возможностью вращения и снабжен- 20 иого прижимом и толкателем с исполнительным механизмом, блок контроля, содержащий датчики наличия предметов, датчик положения предметов и датчик положения толкателя, и блок управления, содержа- 25 щий генератор импульсов и триггер, отличающееся тем, что, с целью повыщения надежности работы путем предотвращения проскальзывания предметов, прижим снабжен приводом и имеет Г-образную форму, а его горизонтальная штанга одним концом 30 посредством муфты сцепления соединена с осью диска, на другом конце горизонтальной
5
0 5 0
штанги установлен фиксатор с исполнительным механизмом, причем вертикальная штап- га прижима снабжена подпружиненным захватом, установленным с возможностью пе ремещения вдоль нее, блок контроля, дополнительно содержит датчик положения захвата, а блок управления дополнительно содержит линию задержки, ; лемент ИЛИ-НЕ, элемент И-НЕ. одновибратор и дополнительный триггер, выход которого подключен к приводу пг)ижима, выход датчика положения предметов соединен с пер- зы.м входом эле.мента И-НЕ, выходом через одновибратор подключенного к исполнительному механиз.му фиксатора и к первому входу триггера, выходом подключенного к муфте сцепления, выход первого датчика наличия предметов соединен непосредственно с первым выводом привода подающего транспортера, с первым входом элемента ИЛИ-НЕ и через линию задержки с вторым входом элемента ИЛИ-НЕ выход которого связан с вторым выводов, привода подающего тра1:спортера, выход второго датчика наличия предметов соединен с третьим входом элемента ИЛИ - НЕ, выход генератора импульсов соединен с вторым входом элемента И-НЕ, выход датчика положения толкателя соединен с вторым входом триггера, с исполнительным механизмом толкателя и с первым входом дополнительного триггера, причем выход датчика положения захвата подключен к второму входу дополнительного триггера и к третьему входу элемента И-НЕ.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разделения разногабаритных предметов | 1986 |
|
SU1331590A1 |
| Устройство для разделения разногабаритных предметов | 1987 |
|
SU1443975A1 |
| Устройство для поштучной загрузки контейнеров | 1983 |
|
SU1168469A1 |
| Кантователь | 1985 |
|
SU1349957A1 |
| Устройство для разделения разногабаритных предметов | 1991 |
|
SU1818154A1 |
| Автоматическая линия для упаковывания электрических ламп | 1987 |
|
SU1620371A1 |
| Устройство для сортировки разнога-бАРиТНыХ пРЕдМЕТОВ | 1979 |
|
SU814486A1 |
| Устройство для автоматической ориентации предметов | 1987 |
|
SU1452769A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Захват плоских предметов | 1980 |
|
SU908676A1 |
Изобретение относится к устройствам для разделения и сортировки разногабаритных предметов и позволяет повысить надежность работы путем предотвращения проскальзывания предметов устройства и повышения надежности захвата. Устройство со- аержит подающий, приемный конвейеры и сепаратор, выполненный в виде станины с наклонно укрепленным на ней с возможностью вращения диском, на оси которого расположен прижим. В нижней части станины диск имеет ограждение, в котором установлены датчики наличия предметов, и единственный прижим имеет Г-образную форму и снабжен приводом, захватом и контактными датчиками положения предметов и положения захвата. В верхней части станины находится толкатель, связанный с датч1;ком положения толкателя, а для управления сепаратором служит блок управления. При попадании предметов на диск они упорядочиваются вдоль ограждения, вступают в контакт с прижимом, по одному перемещаются вверх и сбрасываются на приемный конвейер. 6 ил.
Фиг. ;
Budf
7
Фиг.г 5 7Jx
Фиг.З
Фиг.14
7
17
Фие.5
| БИБЛИОТЕКА I | 0 |
|
SU331590A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
