42ь 4
СО
Фиг./
Изобретение относится к устройствам для разделения или сортировки разногабаритных предметов, преиму-: щественно в виде параллелепипедов из хаотического многорядного их потока, и может найти применение в технологических линиях обработки штучных изделий, например почтовых посылок.
Цель изобретения - повьшение надежности.
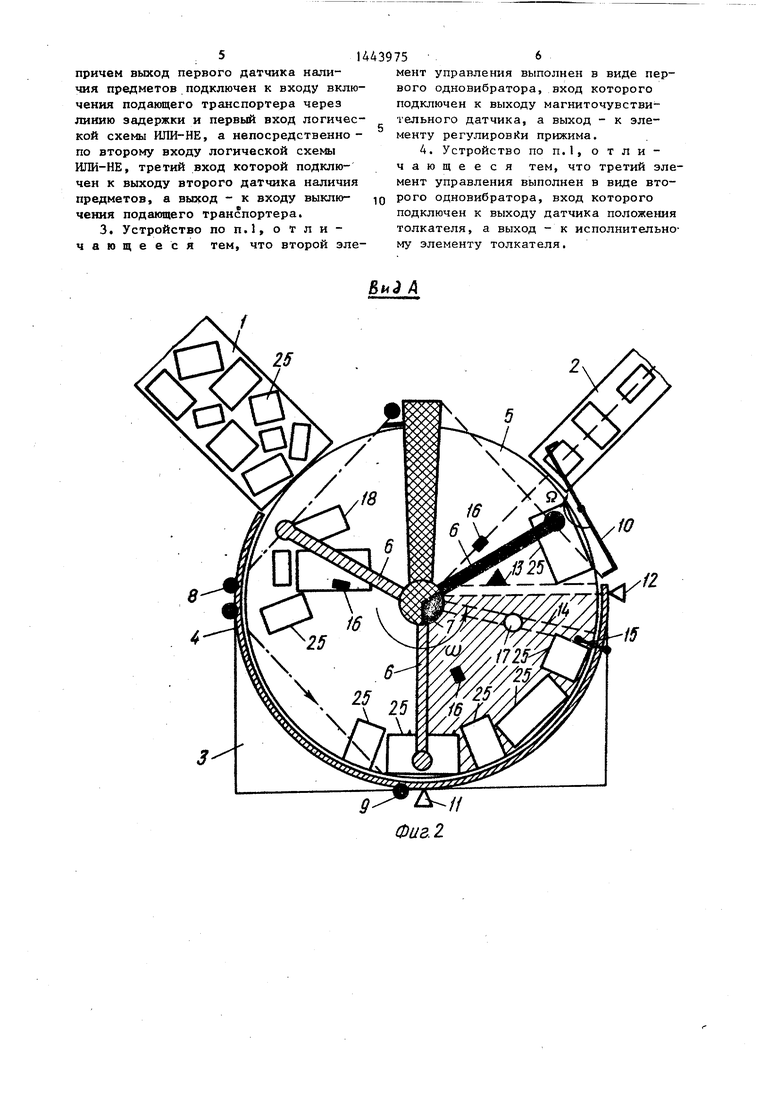
На фиг.1 схематично изображено устройство с частичным вырезом CTBR- ки ограждения, общий вид; на фиг.2 - вид А на фиг.: на фиг.З и 4 - конструкция щупа с упором; на фиг.З - 7 - соответственно функциональные схемы первого, второго и третьего элементов управления.
Устройство для разделения разногабаритных предметов содержит подающий 1 и приемный 2 конвейеры, станину 3, ограждение 4, диск 5, п прижимов 6 (в конкретном исполнении п 3), элемент 7 регулировки прижима, первый 8 и второй 9 датчики наличия предметов толкатель 10 с исполнительным элементом, первый 11 и второй 12 ограничители, датчик 13 положения толкателя, щуп 14, подпружиненный упор 15, п магнитов 16, магниточувствительный датчик 17, а также первый 18, второй 19 и третий 20 элементы управления (фиг.I и 2).
Первый элемент 18 управления содержит линию 21 задержки и логическую схему ИПИ-НЕ 22. Второй элемент -19 управления содержит первый одно- вибратор 23. Третий элемент 20 управления содержит второй одновибратор 24 (сепарируеьме предметы 25 показа- tsd на фиг. 1 и 2).
Устройство работает следующим образом.
В момент включения диск 5 начинает вращаться с постоянной угловой скоростью U . При этом щуп 14 опускается в нижнее положение, определяемое первым ограничителем П, т.е. останавливается под нижней границей заштрихованного сектора (фиг.2) с угловым размером макс -360 /п. Толкатель 10 при этом фиксируется неподвижно по касательной к диску. Подающий транспортер 1 с хаотически расположенными предметами 25 в этот момент выключен, а логическое состояние датчиков 8 и 9 наличия предметов равно: Dg D 0. Такое состояние
0
5
0
5
0
5
0
5
0
5
датчиков 8 и 9 приводит к формированию в первом элементе 18 управления команды на включение подающего транспортера 1. С включением транспортера 1 первая партия предметов 25 попадает на диск 5 и пересекает первый фотобарьер.
При пересечении первого фотобарьера подающий транспортер 1 выключается (фотобарьеры показаны на фиг.2 штрихпунктиром), Величина задержки Г линии 21 задержки выбирается таким образом, чтобы не допустить повторного включения подающего транспортера I, когда предметы 25 прошли первый фотобарьер, но еще не достигли второго фотобарьера. Лишь при наличии низкого уровня на всех входах логической cxeNbi ИЛИ-НЕ 22 формируется команда на включение подающего транспортера 1.
При попадании предметов 25 на вращающийся наклонный диск 5 за счет сложного взаимодействия силы тяжестиj центробежной силы, силы трения между предметами 25 и диском 5, а также силы трения между предметами 25 и ограждением 4, происходит их перемещение вниз по ходу вращения диска 5, В результате действия указанных сил предметы 25 упорядочиваются неподвижно вдоль ограждения 4, причем крайний из предметов 25 при оптимальном угле наклона oL 20-30° диска 5 попадает в рабочую зону величиной ,
Этот предмет приходит в соприкосновение с подпружиненным упором 15, находящимся на конце шупа 14 (фиг.З). Упор 15 занимает угловое положение у, соответствующее передней кромке крайнего предмета 25. На нижней стороне диска 5 на некотором расстоянии 1 от его центра укреплены п (п 3) магнитов 16 с угловым расстоянием соответственно их расположению с отставанием на угол tf 5-10 . К верхнему концу оси диска 5 прикреплены п прижимов 6. Точная величина угла ( определяется быстродействием элемента 7 регулировки прижима, который приводит в действие тот из прижимов 6, который находится в данный момент в рабочей зоне. На щупе 14 на таком же расстоянии 1 от центра диска 5, как и магниты 16, установлен магниточувствительный датчик 17.
При прохождении соответствукяцего магнита 16 над магниточувствительным
датчиком 17 последний вырабатывает импульс, поступающий во второй элемент 19 управления на вход первого одновибратора 23. Последний формирует команду элементу 7 регулировки прижима, которая исполняется (происходит прижимание предмета 25 к плоскости диска 5), когда угловое положение соответствующего прижима 6 оказывается близким к ( (на фиг.2 опущенный прижим 6 зачернен).
За счет резкого увеличения силы трения между диском 5 и крайним предметом 25 последний начинает переме- щаться вверх вместе со щупом 14. При достижении второго ограничителя 12, расположенного на верхней границе рабочей зоны, подпружиненный упор 15 взаимодействует с ограничителем 12 и переводится в положение, перпендикулярное щупу 14. В этом положении подпружиненный упор 15 соскальзывает с движущегося предмета 25 и опускается до крайнего из неподвижных предметов а движущийся предмет -25 попадает в зону действия толкателя 10.
В этой зоне прижим 6 освобождает предмет 25, и на выходе датчика 13 положения толкателя появляется импульс, поступающий на вход второго одновибратора 24 третьего элемента 20 управления. Одновибратор 24 преобразует поступивший импульс в команду для исполнительного элемента толкателя 10. По этой команде происходит срабатывание толкателя 10, который переводит предмет 25 на приемньй конвейер 2. Когда в рабочую зону входит следующий прижим 6, указанные процессы сепарации повторяются.
Б устройстве-прототипе для получения приемлемой точности определения положения крайнего предмета (1-2 см) требуется большое число (несколько десятков) датчиков положения предметов и датчиков положения прижима, которые необходимо тщательно настроить От механической вибрации и возможных ударов датчики положения предметов (фотодиоды) могут расфокусироваться, а от пыли - загрязниться, что снижает надежность устройства. Кроме того для обработки сигналов указанных датчиков требуется достаточно сложный блок управления, что также приводит к снижению надежности работы. Предлагаемое устройство не имеет этих недостатков, поскольку для измерения
1443975
углового положения крайнего предмета используется простейший механический щуп с упором и магниточувствительным датчиком, а элементы управления представляют собой простейшие электронные узлы.
Изобретение позволяет повысить надежность сепарации предметов, исключить технологическое обслуживание устройства, так как не требуется периодической настройки датчиков положения предметов и очистки их от пыли, увеличить точность измерения положения крайнего предмета, так как отсутствует дискретизация измеряемой величины, определяемой в прототипе количеством датчиков положения предметов в рабочей зоне.
Формула изобретения
1. Устройство для разделения разногабаритных предметов, содержащее
подающий и приеьшый конвейеры, толкатель с датчиком его положения. Сепаратор в виде установленного наклонно на станине приводного диска, рабочая зона которого находится между нижней точкой диска и зоной действия толкателя, закрепленного на станине ограждения диска и расположенных на оси диска прижимов, средство для включения прижимов, два датчика наличия предметов, установленных между подающим конвейером и нижней точки диска и средство для определения положения прижимов, отличающееся- тем, что, с целью повышения надежности, в него введены три элемента управления, п магнитов, закрепленных с нижней стороны диска на углу Ср перед каждым прижимом и на расстоянии 1 от оси диска, два ограничителя, закрепленных на станине соответственно на верхней и нижней границах рабочей зоны диска, а средство для определения положения прижимов выполнено в виде щупа, установленного на оси под диском с возможностью движения в рабочей зоне и имеющего подпруткиненный упор, и магниточувствительного датчика, размещенного на щупе на расстоянии 1 от оси диска.
55
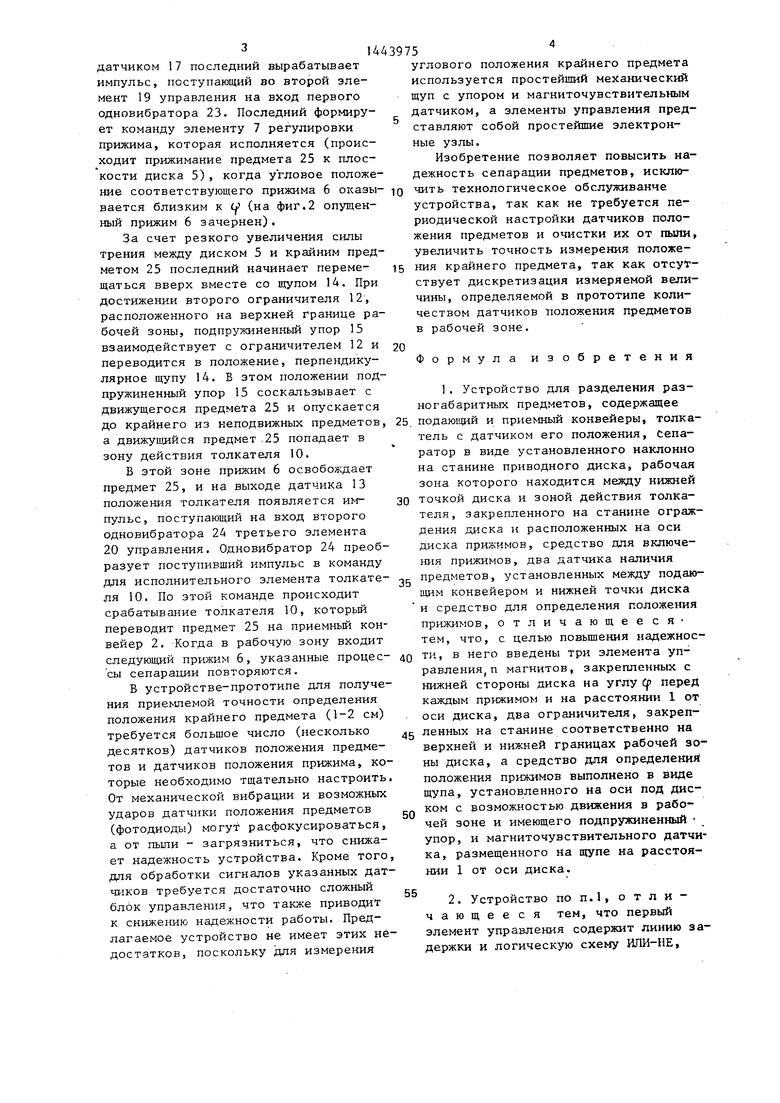
2. Устройство по п.1, о т л и - чающееся тем, что первый элемент управления содержит линию держки и логическую схему ИЛИ-НЕ,
причем выход первого датчика наличия предметов подключен к входу включения подающего транспортера через линию задержки и первый вход логической схемы ИЛИ-НЕ, а непосредственно - по второму входу логической схемы ИЛИ-НЕ, третий вход которой подключен к выходу второго датчика наличия предметов, а выход - к входу выклю- чения подающего транспортера.
34 Устройство по п.1, отличающее с я тем, что второй элемент управления выполнен в виде первого одновибратора, вход которого подключен к выходу магниточувстви- гельного датчика, а выход - к элементу регулировки прижима.
4. Устройство по п.1, о т л и - чающееся тем, что третий элемент управления выполнен в виде второго одновибратора, вход которого подключен к выходу датчика положения толкателя, а выход - к исполнительному элементу толкателя.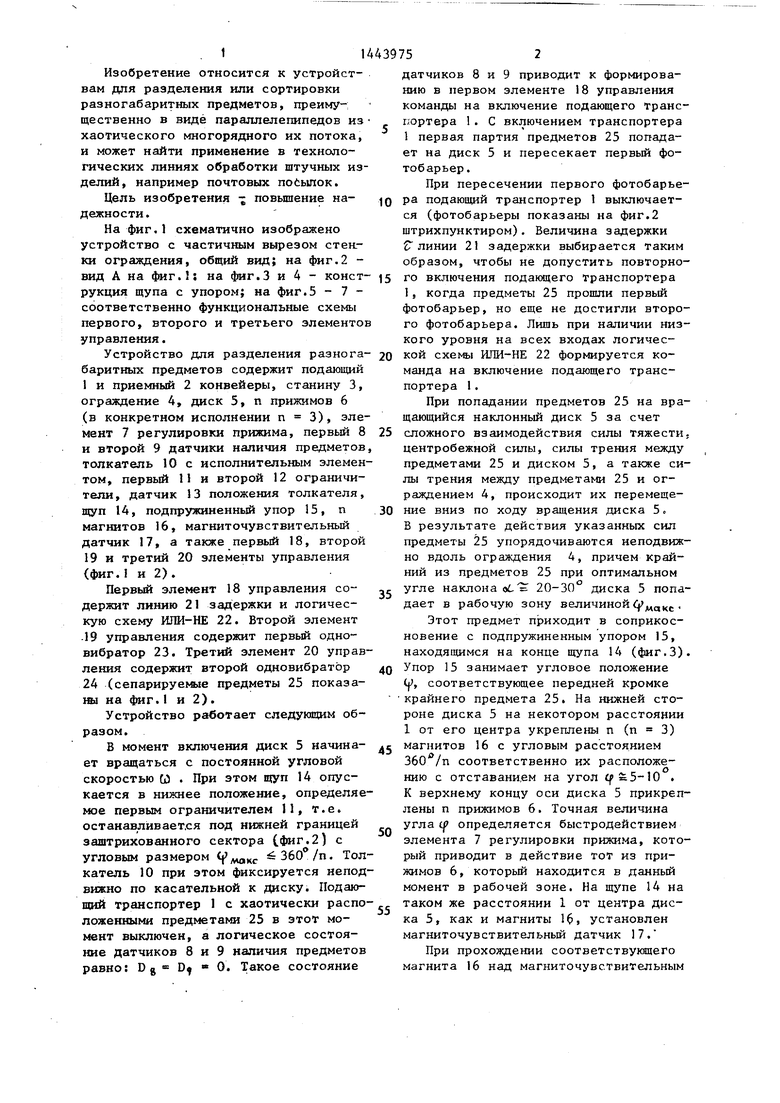
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разделения разногабаритных предметов | 1986 |
|
SU1331590A1 |
| Устройство для разделения разногабаритных предметов | 1987 |
|
SU1466813A1 |
| Устройство для разделения разногабаритных предметов | 1991 |
|
SU1818154A1 |
| РАЗДЕЛИТЕЛЬ РАЗНОГАБАРИТНЫХ ПРЕДМЕТОВ | 1994 |
|
RU2086313C1 |
| Устройство для поштучной загрузки контейнеров | 1983 |
|
SU1168469A1 |
| Устройство для сортировки разнога-бАРиТНыХ пРЕдМЕТОВ | 1979 |
|
SU814486A1 |
| Устройство для укладки в коробки штучных предметов | 1972 |
|
SU440304A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| СТАНОК ШЛИФОВАЛЬНЫЙ ШИРОКОЛЕНТОЧНЫЙ | 2001 |
|
RU2182073C1 |
| Устройство для подачи и загрузки штучных предметов в контейнеры | 1989 |
|
SU1655843A1 |
Изобретение относится к устройствам для разделения и сортировки разногабаритных предметов и позволяет повысить надежность устройства. Устройство содержит подающий 1 и приемный 2 конвейеры и сепаратор, выполненный в виде наклонно укрепленного на станине с возможностью вращения диска 5, на оси которого расположены прижимы 6. В нижней части станины диск имеет ограждение 4, в котором установлены датчики наличия предметов, а под диском установлен с возможностью вращения в рабочей зоне щуп 14 с упором 15 и магниточувстви- тельным датчиком 17. В верхней части станины находятся толкатель 10 и элемент 7 регулировки прижимов. При попадании предметов на диск 5 сигналы датчиков обрабатываются в элементах управления и в случае прохождения прижима 6 над крайним предметом происходит захват предмета и перемещение его в зону действия толкателя, который осуществляет сбрасывание предмета на приемный конвейер 2. 3 34п. ф-лы, 7 ил. (g (Л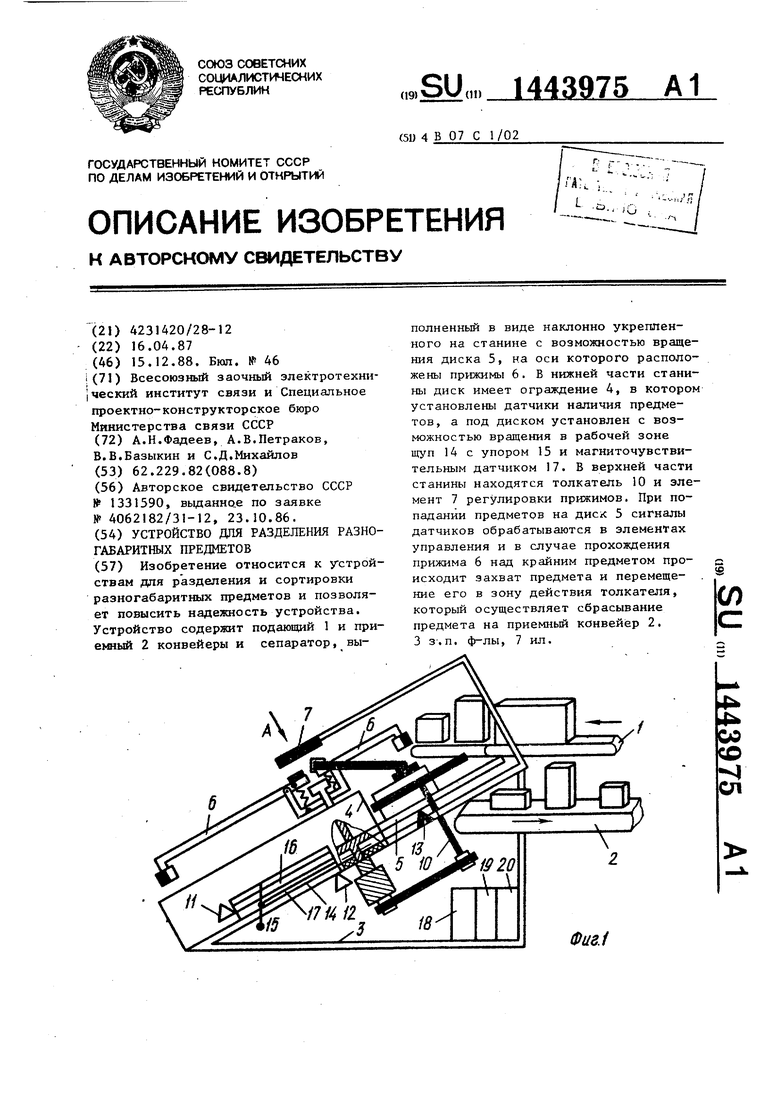
15
ВиЗ cffftxij
r
вид cSofitf
xvwrtryf/w/tf mpoffc/fff me/fG 1
17
,3
ffucffS
uf.3
ffucuS
77 VueA
/nflaMCfropmfpci 1
t
Риг.5
23
ff 3flfMeffmti 7pfgy/rt/- poSttu rrputnuMo
иг.6
2
M e/cfrajif/t/frrf bnof4y Sflff ffffny mo/fM0/rff/ff fO
(fJu9.7
| Устройство для разделения разногабаритных предметов | 1986 |
|
SU1331590A1 |
