Изобретение относится к упаковочной технике и может быть использовано для извлечения бутылок из контейнера.
Цель изобретения - упрощение конструкции и повышение надежности работы достигается за счет нового конструктивного выполнения механизма захвата и перемещения бутылок.
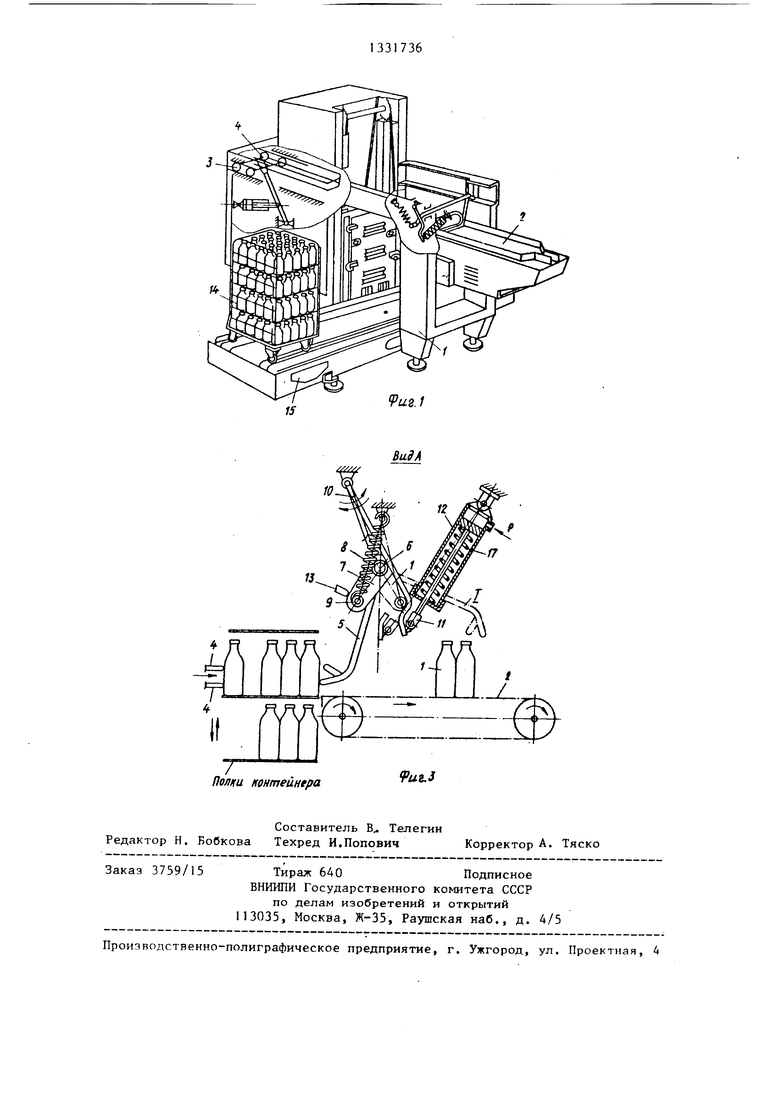
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 - механизм захвата и перемещения бутылок; на фиг.З - вид А на фиг.2.
Устройство состоит из рамы 1 с укрепленной площадкой для вертикального перемещения контейнеров конвейера 2 для отвода бутылок, механизма захвата и перемещения бутылок, включающего каретку 3 с толкателями , поворотную рамЛу 5, валик 6, укрепленный на его конце кривошип 7 с сер вопружиной 8 и ролик 9, поворотный рычаг 10, шарнирно связанный со щто- ком 11 пневмоцилиндра 12, шарнирно укрепленного на раме 1 , упора 13 для ограничения угла поворота кривошипа 7, контейнера 14, транспортера 15, укрепленного на кривошипе 7 пальца 16 и пружины 17.
Устройство работает следующим образом.
Контейнер 14 транспортером 15 подается к месту выгрузки. Толкатели 4 начинают выталкивать с каждой полки контейнера пакет бутылок на движущиеся цепи конвейера 2. При этом первые ряды бутылок упираются в поворотную рамку 5. Под действием усилия выталкиваемых бутьшок поворотная рамка 5 начинает поворачиваться, вращаясь вместе с валиком 6, одновременно поджимая первые ряды бутылок и предот- врапшя их падение. Усилие поджатия создается сервопружиной 8, связанной с пальцем 16 кривошипа 7.
Подкатие бутылок рамкой происходит до тех пор, пока ось действия сервопружины 8 не пересечет центр вращения поворотной рамки 5, т.е.
ось валика 6. Как только это происходит, поворотная рамка 5 быстро отбрасывает вверх п.од действием той же сервопружины 8 и занимает положение I (фиг.З), освободив путь пакету бутылок. Ролик 9 упирается в поворотный рычаг 10. После возврата толкателей 4 в исходное положение подается давление сжатого воздуха в порщне- вую полость пневмоцилиндра 12. Шток 11, выдвигаясь, переводит кривошип 7 и поворотную рамку 5 в исходное положение до упора 13. И поскольку давление воздуха в полости пневмоцилиндра 12 исчезает, шток 11 под действием пружины 17 вместе с поворотным рычагом 10 возвращается в исходное положение, а поворотная рамка 5 с приводом остается в первоначальном положении, ожидая следующий пакет бутылок. Контейнер 14 поднимается для выгрузки пакета бутылок со следующей полки. Процесс выгрузки повторяется.
Формула изобретения
5
Устройство для извлечения бутылок из контейнера, содержащее раму, 0 укрепленную на ней с возможностью вертикального перемещения площадку для контейнера, конвейер для отвода бутьшок, механизм захвата и перемещения бутылок, включающий каретку с толкателями и поворотной рамкой, установленной с возможностью поворота, отличающееся тем, что, с целью упрощения конструкции и повышения надежности работы, механизм захвата и перемешения бутьшок снабжен валиком, укрепленным на его конце кривошипом с сервопружиной и роликом, рычагом и соедиденным с ним пневмо- щшиндром, причем рамка жестко укреплена на валике, на раме укреплен упор для ограничения угла поворота кривошипа, шток пневмоцилиндра связан со свободным концом рычага, а его цилиндр шарнирно укреплен на раме.
0
5
9U2.1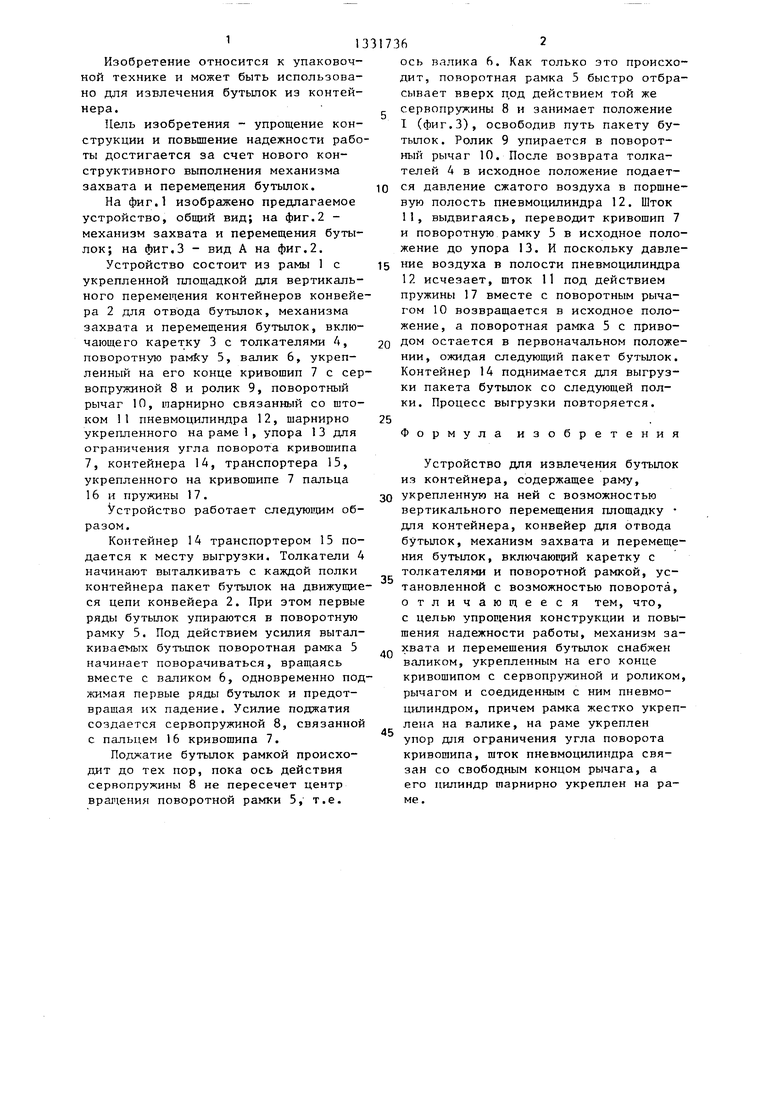
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выгрузки бутылок из контейнера | 1986 |
|
SU1375515A1 |
| Устройство преобразования многорядного потока бутылок в однорядный к установкам для выгрузки бутылок из тары | 1987 |
|
SU1395547A1 |
| Устройство для укладки и извлечения бутылок из контейнеров | 1982 |
|
SU1133167A1 |
| Устройство для пакетирования и обвязки предметов проволокой | 1985 |
|
SU1274959A1 |
| Устройство для укладки и извлечения бутылок из контейнеров | 1984 |
|
SU1197942A2 |
| Устройство для укладки предметов в контейнеры | 1980 |
|
SU929496A1 |
| Устройство для выгрузки бутылок из контейнеров | 1981 |
|
SU1027085A1 |
| Устройство для ориентированной подачи бутылок | 1986 |
|
SU1375513A1 |
| Автомат для сборки пакетов магнитопроводов электрических машин | 1988 |
|
SU1534645A1 |
| Автомат для выгрузки бутылок из контейнера | 1983 |
|
SU1146231A1 |
Изобретение относится к упаковочной технике и может быть использовано для извлечения бутылок из контейнера. Целью изобретения является упрощение конструкции, повышение надежности работы. Под действием усилия выталкиваемых бутылок поворотная рамка (ПР) 5 поворачивается, вращаясь вместе с валиком 6, одновременно поджимая первые ряды бутылок и предотвращая их падение. Усилие под- жатия создается сервопружиной 8, связанной с кривошипом 7, После пересечения центра вращения ПР 5 под действием сервопружины 8 отбрасывается вверх и занимает положение, при котором освобождается путь пакету бутылок. При подаче сжатого воздуха шток 11 пневмоцилиндра 12 переводит кри- вошип 7 ПР 5 в исходное положение до упора 13. 3 ил. ( (/ СО : 00 а
Полки контейнера
Риг.З
Составитель В Телегин Редактор Н. Бобкова Техред И.Попович Корректор А. Тяско
3759/15
Тираж 640Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Гидравлический гайковерт | 1980 |
|
SU929426A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Электроинтегратор для решения дифференциальных уравнений в частных производных | 1960 |
|
SU139094A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
