H3o6peteHHe относится к машинам для разгрузки контейнеров и может быть использоваио в молочной, пиво-безалкогольной и других отраслях пищевой промышленности,
Известно устройство для укладки предметов в контейнеры, содержаш,ее перемеш,аемую в вертикальной плоскости каретку и механизм подъема 1 .
Недостатком устройства является невысокая надежность работы.
Известен автомат для выгрузки бутылок из контейнера, содержащий перемещаемую в вертикальной плоскости каретку и механизм подъема, состоящий из звездочек и цепей, одни концы которых прикреплены к каретке 2.
Недостатком известного автомата является ненадежная работа.
Цель изобретения - повышение надежности автомата в работе.
Поставленная цель достигается тем, что в автомате для выгрузки бутылок из контейнера, содержащем перемещаемую в вертикальной плоскости каретку и механизм подъема, состоящий из звездочек и цепей, одни концы которых прикреплены к каретке, свободные концы цепей кинематически присоединены к каретке с образованием замкнутых контуров, при этом контуры снабжены блоком стопорения и блоком захвата, расположенным в средней части контуров с возможностью возвратно-поступательного перемещения в вертикальной плоскости.
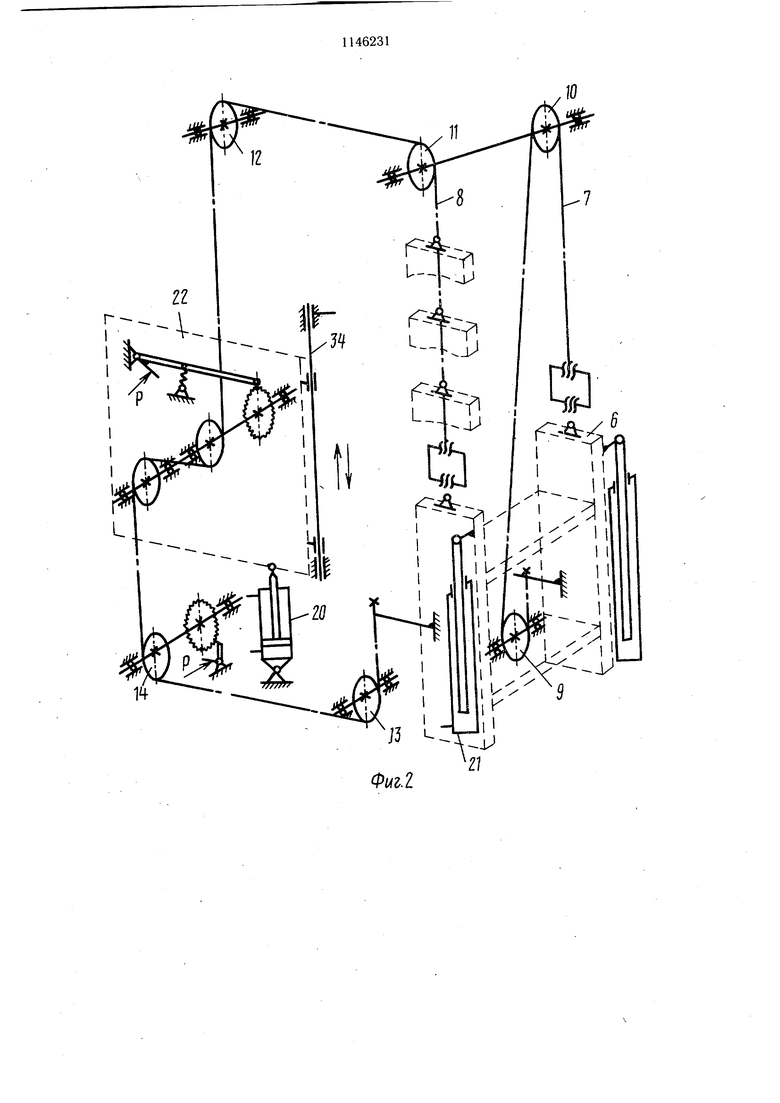
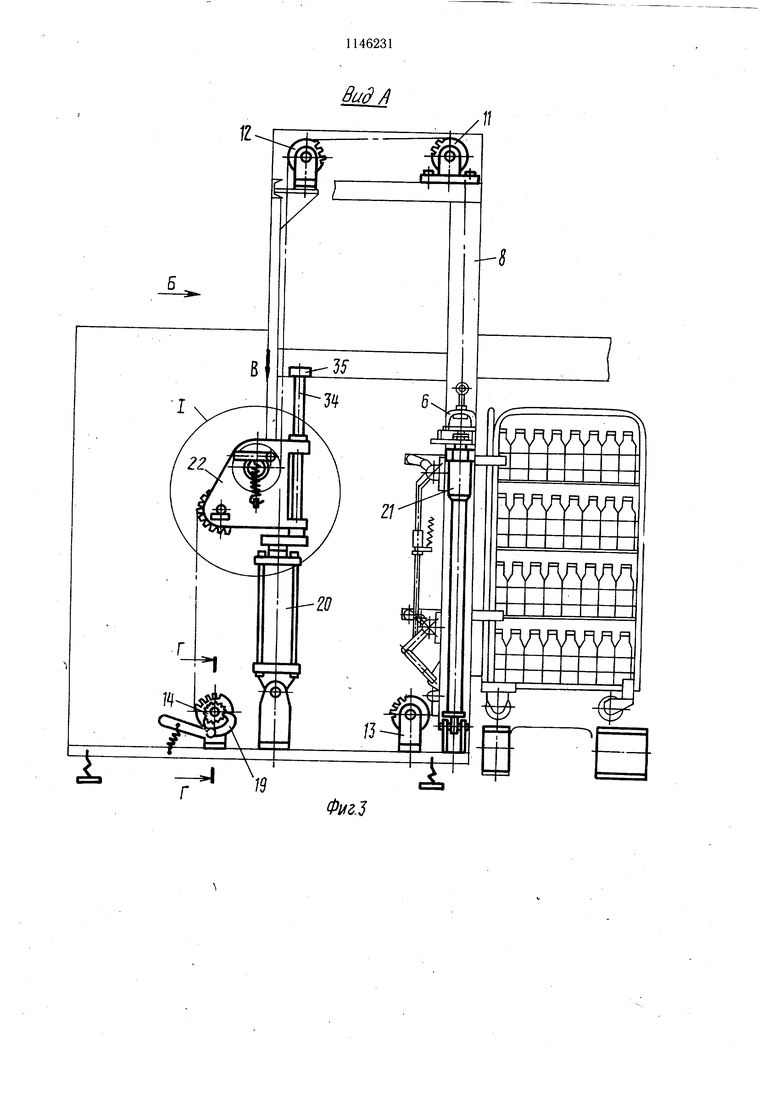
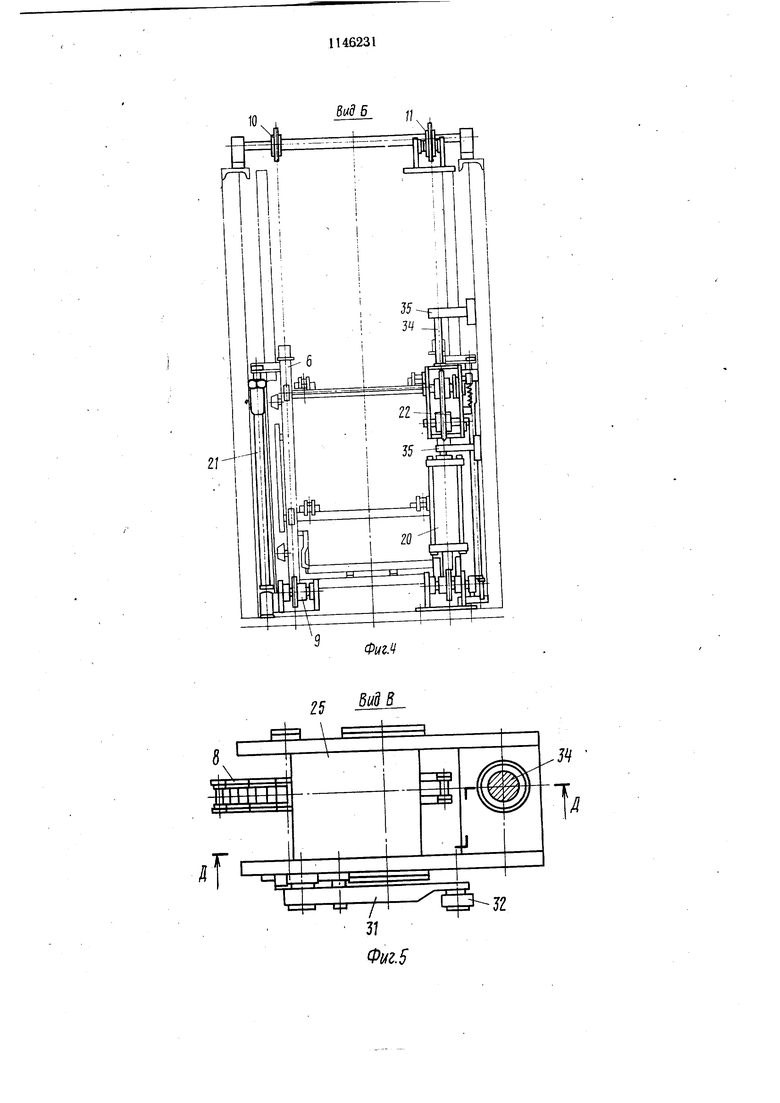
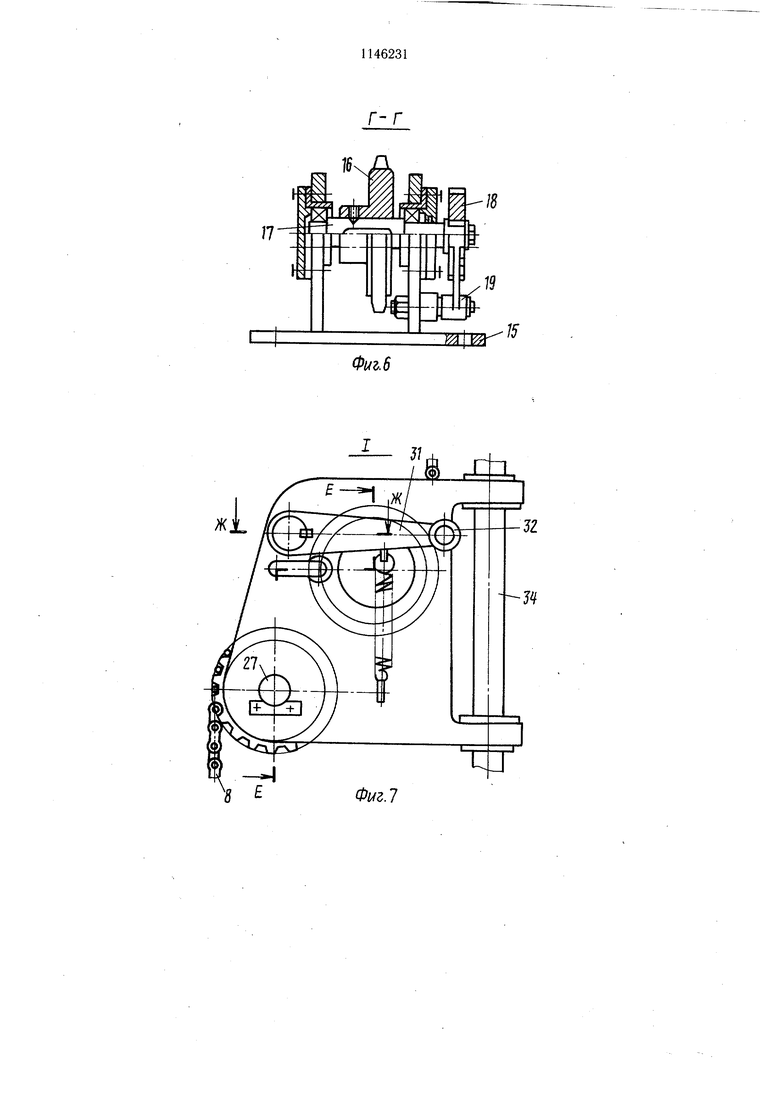
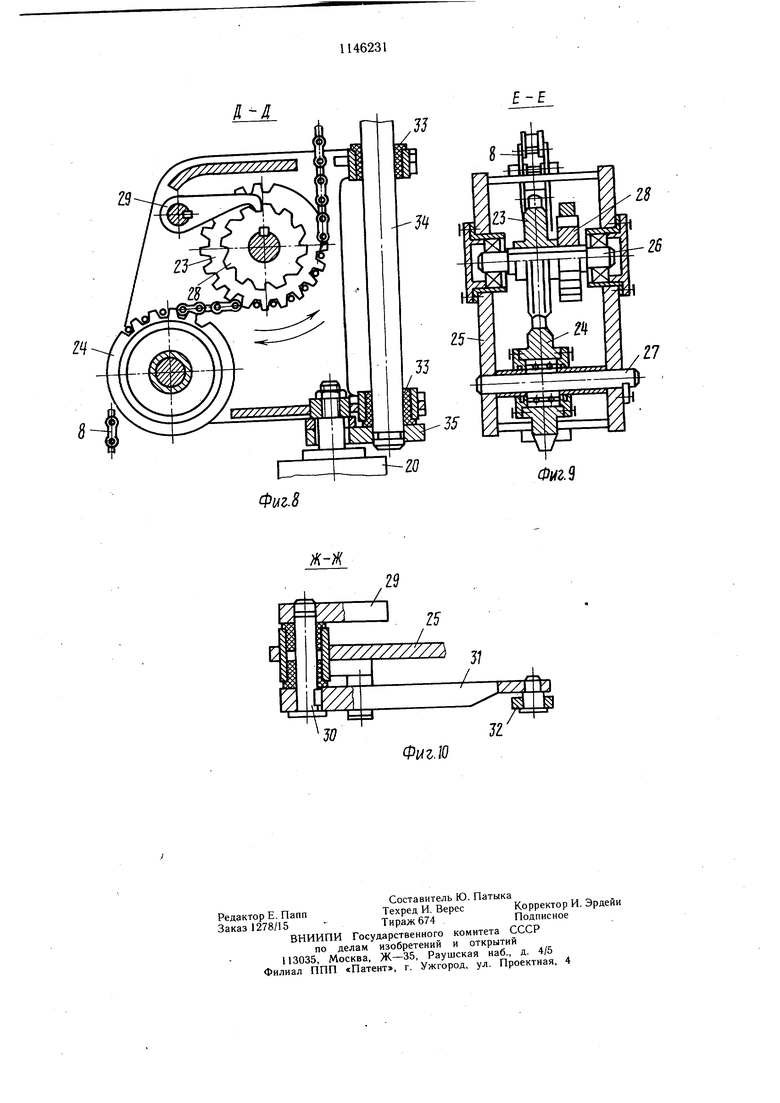
На фиг. 1 схематично изображен автомат для извлечения бутылок из контейнера; на фиг. 2 - кинематическая схема цепного контура; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - вид В на фиг. 3; на фиг. 6 - разрез Г-Г на фиг. 3; на фиг. 7 - узел I на фиг. 3; на фиг. 8 - разрез Д-Д на фиг. 5; на фиг. 9 - разрез Е-Е на фиг. 7; на фиг. 10 - разрез Ж-Ж на фиг. 7.
Автомат состоит из корпуса 1, портала 2, между опорами которого и корпусом 1 расположен конвейер 3 для подачи контейнера. Между боковинами портала закреплен транспортер 4 для бутылок. В корпусе 1 расположен механизм 5 подъема, осуществляющий подъем и опускание каретки 6 с контейнером.
Механизм 5 подъема состоит из цепей 7 и 8, укрепленных на направляющих звездочках 9-13, блока 14 стопорения, включающегй в себя вращающуюся в корпусе 15 звездочку 16, жестко связанную осью 17 с храповиком 18, стопорение которого осуществляется собачкой 19; пневмоцилиндра 20, гидравлических демпферов 21,осуществляющих торможение каретки 6 при ее опускакии; механизма 22 захвата цепи, содержащего звездочки 23 и 24, установленные в корпусе 25 на осях 26 и 27 с возможностью их
вращения, храповое колесо 28, жестко связанное осью 26 со звездочкой 23, стопорение которых осуществляется подпружиненной собачкой 29, соединенных осью 30 с управляющим рычагом 31 и роликом 32, подшипников 33 скольжения, установленных в корпусе 25, с помощью которых совершается возвратно-поступательное перемешение механизма 22 захвата цепи по направляющей 34, неподвижно закрепленной кронщтейнами 35.
Автомат для извлечения бутылок из контейнера работает следующим образом.
Контейнер подается конвейером 3 к месту выгрузки, где он закрепляется на каретке; 6, при этом включается пневмоцилиндр 20, щток которого, выдвигаясь, перемещает в верхнее положение по направляющей 34 механизм 22 захвата цепи. Цепь 8 фиксируется от перемещения блоком 14 стопорения путем стопорения подпружиненной собачкой 19 храповика 18, жестко связанного осью 17 со звездочкой 16. Звездочки 23 и 24 и храповое колесо 28 механизма 22 захвата цепи свободно прокручиваются. Достигнув верхнего положения, шток пневмоцилиндра 20 начинает втягиваться, возвращая механизм 22 захвата цепи в нижнее положение. Цепь 8, связанная своими концами через систему звездочек И -13 и блок 14 стопорения с кареткой 6 и зафиксированная подпружиненной собачкой 29, входящей в зацепление с храповым колесом 28, жестко связанным осью 26 со звездочкой 23 , перемещает каретку 6 с контейнером на шаг, равный расстоянию между полками контейнера, и в этом положении фиксируется собачкой 19 блока 14 стопорения.
Полка контейнера совмещается с поверхностью цепей транспортера 4. Происходит выгрузка бутылок с полки. Затем каретка 6 с контейнером поднимается описанным способом для выгрузки следующей полки. После выгрузки бутылок с последней нижней полки собачки 19 и 29 освобождают от стопорения храповик 18, храповое колесо 28 и звездочки 16 и 23. Каретка 6 с контейнером под собственным весом начинает плавно опускаться с помощью гидравлических демпферов 21.
Управление храповиком 18 и храповым колесом 28 осуществляется специальньш механизмом управления.
Автомат с предлагаемым механизмом подъема позволяет обеспечить точную ориентацию каждой полки контейнера относительно поверхности цепей транспортера. Привод осуществляется от пневмоцилиндра с небольщим ходом штока и соответственно небольшим расходом воздуха.
Применение автомата в народном хозяйстве позволит уменьшить количество боя бутылок и повысит надежность работы оборудования.
MJ
Вид В
ФигЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| Устройство для укладки предметов в контейнеры | 1980 |
|
SU929496A1 |
| Устройство для укладки бутылок в ящики | 1982 |
|
SU1098869A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПОДАЧИ ИЗДЕЛИЙ К РАБОЧЕМУ ОРГАНУ АВТОМАТА | 1997 |
|
RU2112720C1 |
| Автомат для садки кирпича на печные вагонетки | 1983 |
|
SU1104023A1 |
| Автомат для штамповки, надевания и обкатки алюминиевых колпачков на предварительно укупоренные картонным капсюлем бутылки | 1958 |
|
SU122685A1 |
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Устройство для отрезки мерного бруса | 1991 |
|
SU1794677A1 |
АВТОМАТ ДЛЯ ВЫГРУЗКИ БУТЫЛОК ИЗ КОНТЕЙНЕРА, содержаший перемешаемую в вертикальной плоскости каретку и механизм подъема, состояший из звездочек и цепей, одни концы которых прикреплены к каретке, отличающийся тем, что, с целью повышения его надежности в работе, свободные концы цепей кинематически присоединены к каретке с образованием замкнутых контуров, при этом контуры снабжены блоком стопорения и блбком захвата, расположенным в средней части контуров с возможностью возвратно-поступательного перемещения в вертикальной плоскости. (Л О) ю оо
.5
Л
Ж
15
т
ФкгЛ
ФигЯ
V77///.ZZZ/Z 5;
25
/
/
./О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект фирмы «Элопак, Финляндия | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цельномолочная промышленность | |||
| Обзорная информация | |||
| Опыт разработки и внедрения контейнерной системы доставки молочной продукции на предприятиях молочной промышленности | |||
| М., 1982 (прототип).1 | |||
