и Ult iJUM t lUll 1)1 IK КПП я к i))1l.llll, H HIii Al
I paii iiopi и иргдначнп к-но л.1Я мг-хашма НИИ pa frp} (KM (. binv iMX . 1ои,
lllMb и «)Г)р1. ГГ1 1|ЯII llil,lllll Hlll iljlOHi
и()ЛИ1Ч Л1 Н1)сги pa и p (чика
(л1аГ)Ж011ие чика сыиччих а гериа. юн yn aiion. H iinoii с ношожное но i- нра ГН()-11ос1 у|1ател1.ио1Ч) ирололыю о iii )( щения ()}1 . нижними и иерхиимн иа- нранляюишми, 11латфо(1мо(1. рап1олож1М1ИОЙ сно ЛМОЖИО ЛЛ 1) |и Н %иЧ1иЛ1ИЯ ИО
нижним жшраиляюншм ,1, карслко, с таиов. имшой на верхних иан)авлякииих, выли11жно(1 |))й со (.люн гиронанными пол Hci i лиумя иа()ами плоков. установлени1;1м между Г). 1ока 1И сило1М11м цилиндром, ипок
KOTOpOIO (. ООДИШЛ I ОЛН011 Hapoii O.IOKOB,
позволяет и1ачит(М1Л1о гни(игь динамические нагрчжи нри )а U р (ке маге)иала и но- ) належность paooi bi pa:u ру .
На (. 1 (иображена кии(. ма 1 ичеекая схема ра U р )чик;-;; на фиг 2ралгру: чик, ()Г 1ЦИ11 вил.
Ра11 руччик еолержи уе гаиовленн1 п1 на раме 1 скребок 2 с нриволом Л. ама 1 с- тан()вл(Л1а с во июжнос iiio воли)а гнол1ос1л- нательного нродольнсно ||ер1 ме11ил1ия и имеет нижние 4 и вержние Г) нанравлякинис Принол скребка 2 солержит нла|форм Ь, раснолоЖ1.л1И К) с но шожносгыо нереме- шеиия но нижним нанравляюшим 4 рамн: 1 карегкч 7, 1 тановленн ю на верхних на 1|рав,;ЯН)Н1ИХ Г), )асноложеипук) иод последними выдвл .жнук) раму S со смон i И1.1МИ нод Н1Л1 двчмя нарами блоков 1. ус 1 анов. X с В(мможнос 1 i)lo Hepi MriЛ1-Л1 ня 1И) 1ил1ям К).
М1 жл блоками 1 yci .л1 силовой
ЦИЛИИД 1 I, ililoK которого СОеДИЛНЛ с ОДН011
нарой блоков I, Выдвижная рама 1 paciio /южена между верхними ) наиравля1 1Н1Ими и H. ia i формо(| t) с во м()жнос 1 He peMi -- И1ения но иос.тслнен. а Kapi TKa 7 Ж1члко coi - лннена с леш.ю lu и смонтирована с можносило 111 ре клиения по выдвижно11 раме М, 11,и. Л1НЛ 11 (акренлс н на нлатфо|)- ме ().
Г) 12 со скребком 2 с i анои. ил1а с во(можиостьк) иолнимания или онуска с HoMOHU)Ki двух 1Л1Лронилинлров 1:5. ()сь б,1око1 9 жес1ко связана (. вьпвиж- Hoii paMoii М и имеег возможное ii iiefteMe- шагься на рамках 14 по 11Ла и)орме . При В11|движе1 ии 1итока снлово1() ни.-шннлра 1 1 тяговьн нени И), (акрен:1е |иые к каретке In. 1яиуг ее н карегка 7 ia р(.1лик;|х lii лвигае1ч я но вылвижно|| )аме . г -. зочная ка)егка 7. нер.едвигаясь ио рс.. своим ек(1ебком 2 С1 а.1киваег ci,iiiy4Hi( i р i с же.1е (иоло)ожной нла 1 (})ормы 17 в 18. -).1екгропривол 1. л.1я В(мвра1 а разгрузочной ка|нл ки 7 в и( хол1Н)1. положение
11релотвран1енне 11| 10В11сания i Я1 овых Ui4U4i 111 и Ho.i 4t4Uie (амкичгой кинема
0
5
0
5
0
1ическо11 cxi-MtJ yf.ia нривола Л )аз1 рузчи- K:I на ||)о I и:з()Ноложио : коинс выдвижной рамы ос |цсс1Л ЛЯКГ1ся (а счет дву.х блоков ) и ч равни1с.тьн1)1Х камаюв 20. I l. iaТ форма 1) можег |;ер1 М1ЛНат ься на роликах 21 но г;и/кянм н;Л1рав.тяк)ии1м 4 раи|) от до- пол fiHTe. ihiioro гидрони.пшлра 22, который воспринимает реактивн1 К си. П), возника- ичцнс нрн сталкивании сыпучего I pyta. че- 1Г1ан и 2i5 и у11орн1.1Й ба1нмак 24 и пере- нх на ненодвижны унор 25. Штанги 23 емонгированы с возможностью перемещения нн гри нанрав.тяюших нтч.юк 2(i. Нижние на- 11ра, 1як)1ние 4 раз р 1чика нс ремеигаются О роиринода 27 на 4eTi)ipi x ХОДОЕИЯХ колесах 28 И(. )ельсовым н гям 2Я, закрен- .КЛ1НЫМ на опорах . 50.
I a.i (чик рабогает с.1слук)И1им o6pa.iOM.
j) и I ружел|о{| же. 1ез 1одорожн()й л.1ат(|)ормы 17 с ()ткр1,|-1ыми Гм)ков1,1ми 6o|v гамн у1.л анав. 1ивае 1 СИ с ,ыо ген.товоза 11.И ма иев|1ово1 о у1.л poiic i на но фроигу ра.з- гру iKH.
I a.u рчзчик с HOMoiubH) :).тектро11|)ив()да 2/ (аинмае; иехолнос нолож1Л1И1 . ( номо- iHiiio лнух гидро1иг1инд|)()в 1:5 ба/жи 12 со 1 кребком 2 поднимаются на необходимую со I и с HoMoHibK) доно.тнн le.ibHoro гидро- ни. лл.дра 22 механизм 1Н) ниж- ии.м нанра11. 1ЯК)ни м 4 )(мвн1 а1 тся вн.тот- иио к л. la (|)орме. ч1-обы Bi)i6pai3, жс.теию- дор||ЖНЬ и 1аба|)И1 .Л |фи1. 2|, когорьп не обх(лим i з)ображени ii техники безонас- iiocMi. lli)c,i -iioro вкиочае ия с iioMoiuijh) 1 ил pi pak ii|it b.M4 I е. 1Я (не iioKaiaH). CH.IOBOJI ИН.лЛ Мр 11 с ра (внвае л 1 1 уси.тнем 1(1 т.
0
-3
0
5
5
ии,1инлра II выдви1ае1ся вместе с рамой - ()диов|)емеино при В|)|двнж141ии irioKa ни.ппцра 1 н рамы 8 через б.юки н гяговые цени 1И, обра (уннцне обрат- ны11 по.1исцас1. каретка I о дн111аегся но раме 8 и 1яц(л ill соб(Ц1 )уз(1чную каретку 7. когорая 11е)едви1 ае 1 ся ио вертика.ты1ым нанрав.1Я1). Ра гр (очная каретка 7 за сче1 i.3iv i eMi i обрагного но.тиенаста нро- ()Д|11 iiyib. равн1)111 двойному .ходу i идро- цилнилра. В конс р кц11и ра.зг 1узчика мо- бьпь 11,1имечены i нлрон11. 1иидр, рама и Kapi-гка о г авто11ог)узчика тнна 4()4Г/. ко- ;орь1И обес11ечи11ае г ход кар(. 1КИ 40(10 мм
|ри перемещении разгру(очной каретки 7 со скребком с иача.ibHoi o иоложення в KjKiiiiic e ноложение нер1ил1лик.тя|1но же.н з- нолорожлюй H. ia Г(})о|1ме 17 ск|)ебок 2 унн- КК тся в С1,Ц1учий гр ( и сталкивает ei o в бункер 18. Ek)3B|)ai разгруз«)чной каретки 7 в исходное ноложеине осун1еетв. 1яется от :.чек гронривода I ). так как i.3i.Toiioii ии.тиидр 11 о.;л1осюронне; о д(лк твия. Доно.тнител)- ный ;1лроци.тиндр 22 I ВИЯ
Формула if.tonpCTL HUH Ра:и-рузчик сыпучих материалов и:1 же- ,1е;ии)Л()р()жных плагформ. содержащий ус- танонленный на раме скребок с приводом, отличающийся тем, что, с пелью повьипения прои:шодительпости, рама устаповлепа с во;ии)жпостьк) во; вратно-поступательного продольного 11еремеп1ения и имеет нижние и верхние нанравляюпше, а привод скребка содержит платформу, расположеппую с возможностью перемешепия по нижним на- правляюп1им рамы, каретку, установленную на верхних направляюп1Их, расположенную
НОЛ последними выдвижную раму со cMOti тированными под ней двумя парами б. кжов. установленных с возможностью перемещения по пепям, прп этом между блоками установлен силовой цилиндр, 1ПТОК которого соединен с одной парой блоков, выдвижная рама расположена между верхними на- нравляюн1ими и платформой с возможностью неремещения по последней, а каретка жестко соединена с цепью и смонтирована с возможностью перемещения по вижной раме, причем цилиндр закреплен на платформе.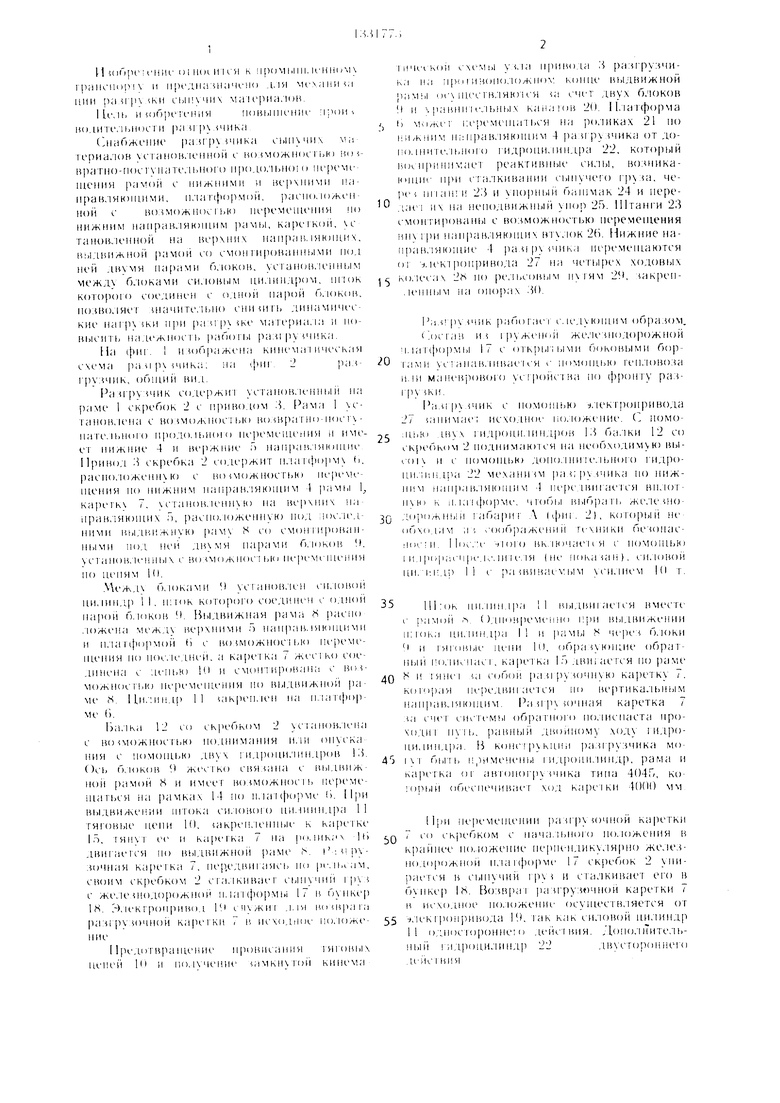
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для направления спицы при остеосинтезе шейки бедра | 1986 |
|
SU1329778A2 |
| Грузозахватное устройство | 1986 |
|
SU1379221A1 |
| Устройство для закрепления железнодорожного состава | 1987 |
|
SU1530517A1 |
| Устройство для группового упаковывания предметов | 1987 |
|
SU1528687A1 |
| Установка для очистки ливневых стоков | 1985 |
|
SU1327915A1 |
| Установка для изготовления резинотехнических изделий | 1987 |
|
SU1519898A1 |
| Косилка | 1986 |
|
SU1340630A1 |
| Способ автоматической смены штампов на прессе и устройство для его осуществления | 1985 |
|
SU1344487A1 |
| Пресс-форма для изготовления изделий из пластмасс | 1986 |
|
SU1399147A1 |
| Устройство для адаптивной временной дискретизации сигналов | 1986 |
|
SU1322345A1 |

Изобретение относится к промышленному транспорту и предназначено д.чя механизации разгрузки сыпучих материалов. Цель изобретения повын1ение п)оизводительноети разгрузчика. Разгрузчик С1 н1учн мате|111алов снабжен установленной с возможностью возвратно-ноступательного про- до,:1)Ногч) перемещения рамой 1 с нижними 4 и верхними 5 направляюнщми. П. ютформа 6 расно.южена с возможностью перемеп1ения но нижним направляющим 4 рамы 1. Каретка 7 установ.тена на верхних направляю- П1ИХ 5 с возможностью неремеиюния. На нижних панрав. тюших 4 смонтирована выдвижная рама 8 с размещенными под ней двумя парами блоков 9. Между блоками 9 установлены силовые цилиндры 11. Шток цилиндра соединен с одной парой блоков.2 ил. 17 5 2 12 Ю в 15 /3 д 6 7 /// /// /// /// //г уу ///I/// у////V /// Л / /// // /ill /1 27 3 21 3 Л 6 22 23 2и ije.f § (Л 20 оо оо оо
3 7
| Коиетатопуло Г | |||
| С | |||
| Ме.ханнческое оборудование :(ав()дов железобст() | |||
| изделий | |||
| ЛА.: (лройиздат, 1982, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Насос | 1917 |
|
SU13A1 |
