(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шахтной подъемной машиной | 1986 |
|
SU1502451A1 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| Устройство управления шахтной подъемной установкой | 1985 |
|
SU1331783A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1986 |
|
SU1382797A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1987 |
|
SU1474061A1 |
| Устройство индикации местоположения сосуда шахтной подъемной машины | 1986 |
|
SU1411258A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1989 |
|
SU1745659A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1988 |
|
SU1553501A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1990 |
|
SU1794844A1 |
| Устройство управления проходческой подъемной установкой | 1979 |
|
SU861263A1 |
Изобретение относится к горнорудным подъемным установкам и позволяет повысить достоверность вэдачи путевых команд (ПК) путем автоматического диагностирования. Для этбго устр-во снабжено тремя элементами И-НЕ 7,9 и 10, элементом ИЛИ 9, датчиками (Д) 12 глубины подъема и Д 11 нулевой площадки и двумя индикаторами 13 и 14. Выходы элементов И-НЕ 7 и ИЛИ 8 подключены к первым входам элементов И-НЕ 9 и 10, а к вторым их входам подключены выходы D-триггеров 3 и 4. Первый вход элемента И-НЕ 9 соединен с выходом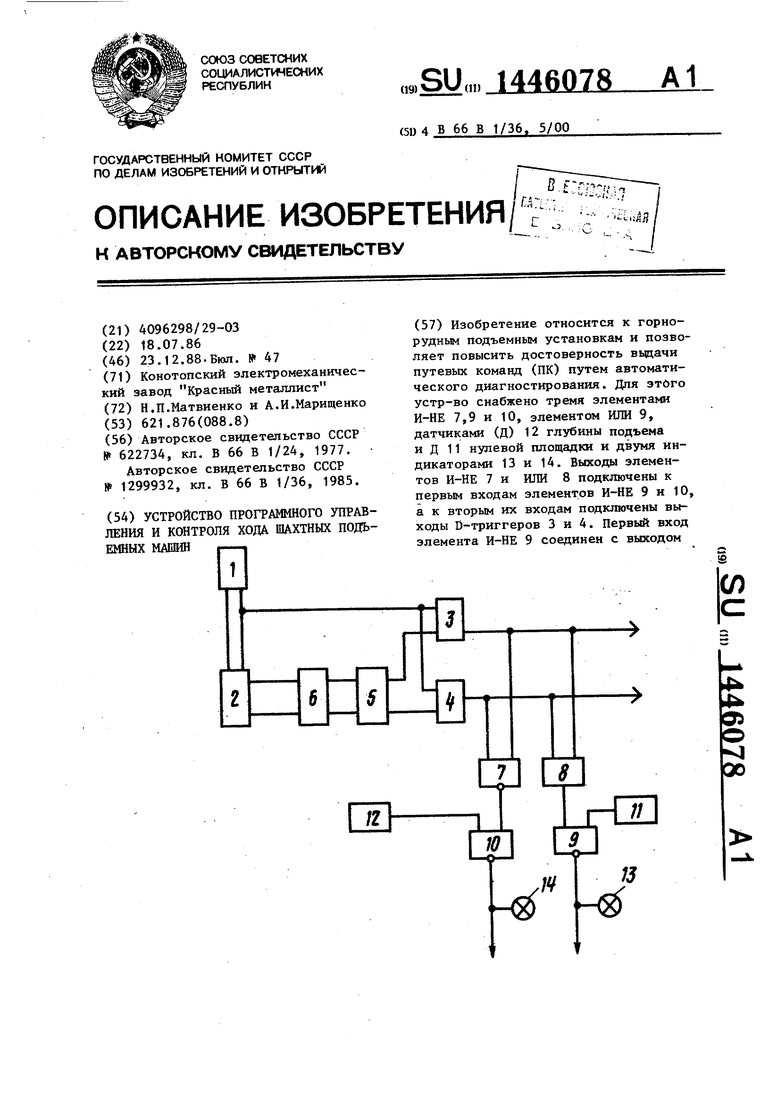
U
t-O
4;а
эо
1J
га щ
.W
;j
- -
Д 11, первый в:сод элемента И-НЕ 10 - с выходом Д 12. Выходы элементов ИтНЕ 9 и 10 подключены к индикаторам 13 и 14 соответственно. К информационным входам D-триггеров 3 и 4 подключен один выход Д 1 путевых импульсов, и оба его выхода соединены соответственно со счетным и уп- равлякицим входами реверсивного счетчика 2. Выходы счетчика 2 подключены к входам постоянного запоминающего узла 6, выходы которого соединены с входами дешифратора 5. При движении
1
Изобретение относится к горнорудным подъемным установкам и может быть использовано для управления и контроля хода шахтных подъемных машин.
Целью изобретения является повышение достоверности вьщачи путевых команд путем автоматического диагностирования.
На чертеже изображена функциональная схема устройства.
Устройство состоит из датчика 1 путевых импульсовS один, выход которого соединен со счетным, а второй - с управляющим входом реверсивного счетчика 2 и информационными входами первого 3 и второго 4 D-триггеров.
Сиихронизирукяцие входы D-триггеров 3 и 4 подключены к вьгходам депифрато- ра 5, входы которого соединены с выходами постоянного запоминающего узла 6 (ПЗУ). Входы ПЗУ 6 подключены к выходам реверсивного счетчика 2, а выходы D-триггеров 3 и 4 соединены с входами второго элемента И-НЕ 7 и элемента ИЛИ 8.
Выходы элементов И-НЕ 7 и ИЛИ 8 подключены к вторым входам первого 9 и третьего 10 элементов И-НЕ соответственно. Первый вход элемента И-НЕ 9 соединен с выходом датчика 11 нулевой площадки, а первый вход третьего элемента И-НЕ 10 - с выходом датчика 12 глубины подъема. Выходы элементов первого 9 и третьего 10 эдемен- тов И-НЕ подключены к первому 13 и второму 14 индикатору соответственно.
сосуда подъемной машины вниз или вверх при выдаче всех запрограммированных ПК на выходах соответственно элементов И-НЕ 7 или ИЛИ 8 будет присутствовать сигнал ноль. При наличии хотя бы одной не снятой ПК на выходе элемента И-НЕ 7 или ИЛИ 8 соответственно появится сигнал,который приведёт к срабатыванию элемента И-НЕ 9 или 10, а следовательно, к загоранию индикатора 14 или 13. Это свидетельствует о неисправности в устр-ве. 1 ил.
0
5
0 5
д
5
Датчик 1 путевых импульсов предг назначен как для определения направления движения сосуда шахтной подъемной машины, так и для вьщачи дискретных сигналов, пропорциональных пройденному машиной пути, например, с дискретностью 0,01 м. При движении сосуда вниз от нулевой площадки на втором выходе датчика 1 путевых импульсов присутствует сигнал 1, а при движении вверх - сигнал О.
ПЗУ 6 предназначено для программирования путевых команд по всей высоте подъема. На его выходах появляются двоичные запрограммированные сигналы,например,в двоичном нормальном коде, которые поступают на входы дешифратора 5.Двоичные запрограммированные сигналы на выходах ПЗУ 6 соответствуют заданной путевой команде на данной высоте подъема. ПЗУ 6 представляет собой полупроводниковый пе- репрограммируемый постоянный запоминающий узел выполненный, например, на микросхемах К573РФ5, К573РФ6 и др. При малом количестве путевых команд .сигналы с выходов ПЗУ 6 на входы D-триггеров 3 и 4 могут поступать непосредственно. При этом программирование путевых команд в ПЗУ 6 осуществляется в позиционном коде.
Датчик 12 глубины подъема предназначен для вьщачи сигнала 1 при достижении шахтной подъемной машиной заданной глубины. В качестве датчика 12 глубины подъема может быть использован датчик нулевой площадки противоположного скипа шахтной подъемной машины.
Устройство работает следующим образом.J
При движении сосуда шахтной подъем- ной машины от нулевой площадки вниз с первого выхода датчика 1 путевых Импульсов на счетный вход реверсивного счетчика 2 поступают импульсы,про-ю вательно, и к загоранию индикатопорциональные пути, пройденному сосудом. С второго выхода датчика 1 путевых импульсов на управляющий вход реверсивного счетчика 2 и информационные входы D-триггеров 3 и 4 поступает сигнал 1. Информация о-пройденном пути подъемным сосудом поступает с выхода реверсивного счетчика 2 на адресные входы ПЗУ 6. С разрядных выходов ПЗУ 6 информация постзшает на входы дешифратора 5, которьй включает D-триггеры 3 и 4, вьдавая путевые команды в систему управления электроприводом. При вьщаче всех запрограммированных путевых команд на выходе второго элемента И-НЕ 7 присутствует сигнал О, под действием которого третий элемент И-НЕ 10 не срабатьшает, несмотря на то, что на втором входе его присутствует сигнал 1 от датчика 12 глубины подъема. При отсутствии хотя бы одной запрограммированной путевой команды на входе элемента И-НЕ 7 на его выходе появляется сигнал 1, который приводит к срабатьшанию элемента И-НЕ 10 а следовательно, и загоранию индикатора t4, что свидетельствует о неисправности в устройстве с указанием
ее причины - не вьщачи путевой коман- 40 о D-триггеров подключены к первым
ды.
При движении сосуда подъемной машины вверх на втором выходе датчика 1 путевых импульсов присутствует сигнал О, вследствие чего D-триггеры 3 и 4 выключаются под действием сигналов, поступающих с ПЗУ 6 через дешифратор 5, а следовательно, и снижаются путевые команды. При сняплощадке и с датчика 11 на вход эле- мента И-НЕ 9 поступает сигнал 1. Элемент И-НЕ 9 не сработает и индикатор 13 не загорается. При наличии хотя бы одной не снятой путевой команды на выходе элемента ИЛИ 8 появляется сигнал, который приводит к сра- батьшанию элемента И-НЕ 9, а следо15
ра 13, что свидетельствует о неисправности в устройстве с указанием причины - не снятии путе|вой команды.
Формула изобретения
Устройство программного управления и контроля хода шахтных подъемных машин, содержащее датчик путевых импульсов, первый выход которого соединен со счетным, а второй выход - с управляющим входом реверсивного счетчика и информационными входами первого и второго D-триггеров,синхронизирующие входы которых через дешифратор и постоянный запоминающий узел подключены к выходам реверсивного счетчика, при этом выходы первого
и второго D-триггеров включены в цепь электропривода подъемной машины, о т- личающееся тем, что, с .целью повышения достоверности вьщачи путевых команд путем автоматического диагностирования, оно снабжено тремя элементами И-НЕ, элементом ИЛИ, датчиком глубины подъема, датчиком нулевой площадки и двумя индикаторами, причем выходы первого и второи вторым входам второго элемента И-НЕ и элемента ИЛИ, выход датчика нулевой площадки подключен к первому входу первого элемента И-НЕ, второй вход д которого подключен к выходу элемента ИЛИ, а выход первого элемента И-НЕ подключен к первому индикатору, датчик глубины подъема подключен к первому входу третьего элемента И-НЕ,
| Устройство для поштучной выдачи листов из стопы | 1975 |
|
SU622734A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
