Изобретение относится к области автоматизированного электропривода, имеющего зазоры в механических сочленениях силовых элементов, и может быть использовано при автоматическом регулировании положения исполнительных: устройств, например, в опор- ио-говоротных механизмах экскаваторов, моделирующих стендов и роботов-манипуляторов .
Цель изобретения - повышение надежности работы электропривода при наличии люфта в механических соединениях .
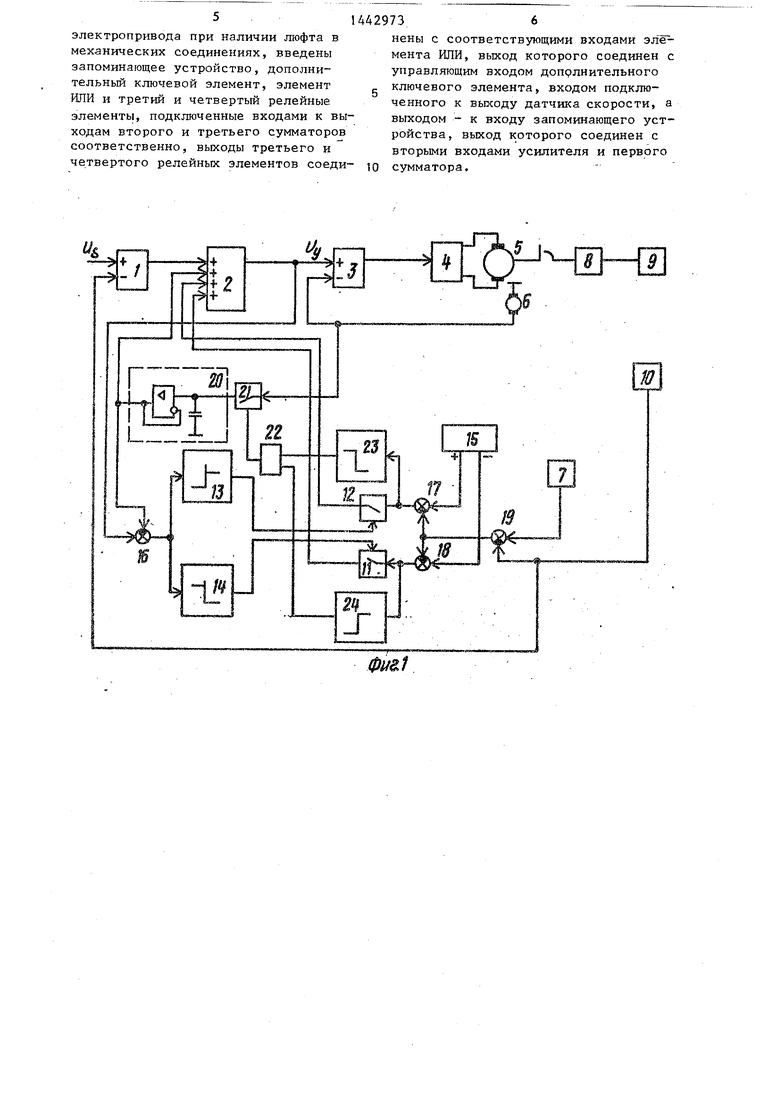
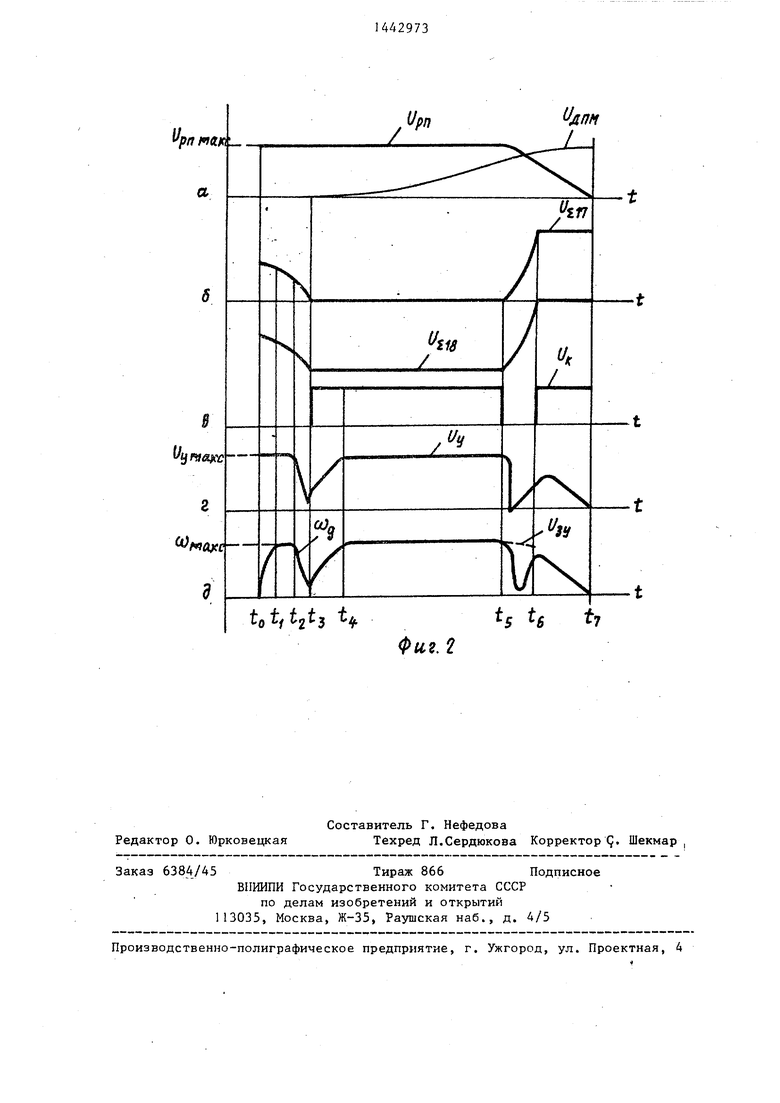
На фиг. I представлена функциональная схема электропривода; на фиг, 2 - эпюры, поясняющие его работу,
Следящш электропривод (фир. 1) содержит регулятор 1 положения, суммирующий усилитель 2, регулятор 3 скрости, преобразователь 4, двигатель 5 с датчиком 6 скорости и датчиком 7 положения вала, редуктор 8 с люфтом, исполнительньш механизм 9, датчик )0 положения исполнительного механизма, первый и второй управляемые ключевые элементы 11 и 12, иервьй и второй релейные элементы 13 и 14, источник 15 напряжения смещения с разнополярными выходами, первый, второй, тре- тий и четвертый сумматоры 16-19, запоминающее устройство 20, дополнительный ключевой элемент 21 , эле- мент ИЛИ 22 и третий и четвертый релейные элементы 23 и 24.
Работа следящего электропривода, например, в режиме позиционирования Выходной сигнал сумматора 19 равен разности выходных сигн-алов датчика положения двигателя и датчика положение исполнительно.го механизма Б исходном состоянии с обоих датчиков положения поступает сигнал, равный нулю. При этом выходные сигналы сумматоров 17 и 18 равны напряжению Uy источника смещения и противоположны по знаку. Напряжение U, пропорционально величине зазора и равн
ицс
К,
где
2 ) /i( максимальная величина зазора;
К. коэффициент датчика положения.
Управляемые ключ.евые эЛементы 1 1 $ 12 и 21 разомкнуты, и напряжения на
14429732
выходе запоминающего устройства 20 и на третьем и четвертом входах усилителя 2 равны нулю.
5
0
5
В момент времени t на вход регулятора 1 положения поступает сигнал и, (например, положительный), который приводит к дасыщению регулятор положения, и его выходной сигнал ста|- новится равным Up,. На выходе суммирующего усилителя 2 появляется напряжение, которое через сумматор 165 воздействуя на вход релейного элемента 13, вызьгоает сра батьшание ключевого элемента 12, и к третьему входу усилителя 2 подключается выход сумматора 17, В результате этого на выходе суммирующего усилителя 2 устанавливается напряжение и f.c{Kc Д гатель разгоняется и при большой величине зазора к моменту времени t его скорость может дост1тчь максимального значения W д,д.(фиг; 2д) , Одновременно за счет изменен-ия сигнала с датчшса положения двигателя напряжение на выходе сумматора 17 уменьща- ется, а на выходе сумматора 18 увеличивается (фиг. 2б).
По этой причине в момент времени 0 2. суммирующий Усилитель 2 выходит из насыщ ения.
За время tj -t напряжение Uu уменьщается (фиг, 2г) до напряжения, которому соответствует разность час- тот вращения двигателя и исполнительного механизма, обусловленная допус- 1ТИМЫМ уровнем динамических перегрузок в механической передаче в мо ., мент зацепления, что обеспечивается выбором коэффициента усилителя 2 по первому входу меньше единицы.
При этом обеспечивается минимальное время выбора зазора.
В момент времени tj происходит процесс зацепления. При этом сигнал с сумматора 17 становится равным нулю, что приводит к срабатыванию релейного элемента 23. Сигнал U, с выхода элемента ИЛИ вызьшает замыкание ключевого элемента 21 (фиг. 2з). . Напряжение tJjy на выходе запоминающего устройства 20 становится равным сигналу с датчика скорости двигателя, а на выходе сумматора 16 - равным нулю, и ключевой элемент 12 размыкается. За время t -t осуществляет-, ся форсированный разгон двигателя до максимальной скорости за счет сигнала положительной обратной связи по
5
0
5
0
5
.скорости двигателя с выхода запоминающего устройства 20. Коэффициент усилителя 2 по второму входу определяется I
li
макс
г к
VI
и
рп макс
и
Wfe(J«
где К К
VI
и
Уг
Uw
ЛЛКС
коэффициенты суммирующего усилителя 2 соответственно по первому и второму входам; сигнал датчика 6 скорости, соответствующий максимальной скорости двигателя.
Механизм 9 движется с максимальной скоростью до момента времели tj. , когда регулятор 1 1оло;ке-ния выходит из насьпцения, вследствие чего двигатель начинает тормозитьсгг. и теряет зацепление с механизмом. При этом меняется знак вг кодного сигнала сумматора 1 6, срабатывает релейный элемент 14, и выход, cy iмaтopa 18 подключается к четвертому входу суммирующего усилителя 2. Одновременно, так как ни один из выходных сигналов cyr-i- маторов 17 и 18 не равен нулю, размыкается дополнительный ключевой элемент 21 . Осуще ствляется запоминание текущего значения скорости двигателя 5, В период выбора зазора характер движения исполнительного механизма определяется только величиной статического момента нагрузки.
Изменение скорости двигателя до омента времени tg обусловлено изменением сигналов с регулятора 1 положе- ия и с сумматора 18. В мойент време- и tg, когда двигатель вновь входит зацепление с механизмом, сигнал с сумматора 18 равен нулю и, следовательно, разность между скоростями двигателя 5 и механизма 9 не больше допустимой. При этом срабатьшает релейньй элемент 24 и через элемент ИЛИ подает напряжение управления на ключевой элемент 21. Выход датчика скорости вновь подключается к входу запоминающего устройства 20. Так как напряжения на входах сумматора 16 становятся равными, то ключевой элемент 11 размыкается..
Торможение электропривода обусловлено темпом изменения сигнала с
0
5
0
5
0
5
0
5
0
5
регулятора положения. В момент времени t следящий электропривод от- рабатывает заданное значение Uj .
Так как в период выбора зазора скорость исполнительного механизма меняется незначительно, только за счет действия статического момента нагрузки, то фиксация величины скорости исполнительного механизма в момент выхода двигателя из зацепления по датчику скорости двигателя позволяет исключить элемент, обладающий, низкой надежностью - датчик скорости исполнительного механизма.
Фор -тула изобретения
Следящий электропривод, содержащий последовательно соединенные регулятор положения, суммирующий усилитель, регулятор скорости, преобразователь и двигатель, снабженный датчиком скорости и датчиком положения вала, исполнительный механизм, механически соединенный через редуктор с валом двигателя, выход датчика положения исполнительного iexaнизмa подключен к входу регулятора положения, выход датчика скорости соединен с другим входом регулятора скорости, два управляемых ключевых элемента, два релейных элемента, источник напряжения смещения с разнополярными выходами и четыре сумматора, первый вход первого сумматора соединен с выходом суммирую- tttero усилителя, выход первого сумматора подключен через первый и вто-- рой релейные элементы к управлякнцим входам первого и второго ключевых элементов соответственно, входы которых соединены соответственно с .выходами второго и третьего сумматоров, а выходы первого и второго ключевых элементов подключены к третьему и четвертому входам суммирующего усилителя, первые входы второго и треть-, его Сумматоров подключены к выходу четвертого сумматора, вторые входы второго и третьего сумматоров соединены соответственно с разнополярными выходами источника напряжения смещения, входы четвертого сумматора соединены соответственно с выходами датчиков положения вала двигателя и исполнительного механизма, отличающийся тем, что, с целью повьшшния надежности работы
электропривода при наличии люфта в механических соединениях, введены запоминающее устройство, дополнительный ключевой элемент, элемент ИЛИ и третий и четвертый релейные элементы, подключенные входами к вы ходам второго и третьего сумматоров соответственно, выходы третьего и четвертого релейных элементов соеди
4429736
нены с соответствующими входами эл ё мента ИЛИ, выход которого соединен с управляющим входом допрлнительного f. ключевого элемента, входом подключенного к выходу датчика скорости, а выходом - к входу запоминающего устройства, выход которого соединен с вторыми входами усилителя и первого
10 сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1985 |
|
SU1332260A2 |
| Следящий электропривод | 1988 |
|
SU1644084A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДЛИНЫ ДУГИ ПРИ ЭЛЕКТРОСВАРКЕ | 2010 |
|
RU2440220C2 |
| Способ автоматического регулирования координат электропривода и устройство для его осуществления | 2017 |
|
RU2660183C1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
Изобретение может быть использовано в механизмах с автоматическим регулированием положения при наличии люфтов в силовой передаче. Электропривод содержит внутренний контур регулирования скорости двигателя и внешний контур регулирования положения механизма. При прохождении зазора с помощью усилителя происходит ограничение сигнала управления из условия допустимых перегрузок в механической передаче в момент зацепления. Величина скорости исполнительного механизма в момент выхода из зацепления фиксируется запоминаю- щрш устройством. Движение электропривода при выбранном зазоре осуществляется с положительной обратной связью по скорости двигателя, чем .обеспечивается требуемое быстродейст- § вне. 2 ил. (Л
w
.
a
Ui
w
MOftC
tflt/tg S 6
Фи2. 2
ЛПН
/
0,
I
/
Uy
V,
ЗУ
MX
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящий электропривод | 1985 |
|
SU1332260A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
