1
(21)4459202/24
(22)12.07.88
(46) 23.04.9U Вюп. № 15
(71)Новосибирский электротехнический институт
(72)ri.ri. Ухин, М.Д. Горбатенков и Ф.К. Фоттлер
(53)62-50(088.8)
(56)Авторское свидетельство СССР № 1332260, кл. G 05 В 11/01,
Н 02 Р 5/00, 1985.
(54)СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД
(57)Изобретение относится к области автоматизированного электропривода
и может быть использовано при автоматическом регулировании положения исполнительных устройств. Цель изобретения - упрощение. Следящий электропривод содержит регулятор 1 положения, суммирующий усилитель 2, регулятор 3 скорости, усилитель 4 мощности, двигатель 5, датчик 6 скорости двигателя, датчик 7 положения двигателя, редуктор 8, исполнительный механизм 9, датчик 10 положения исполнительного механизма, первый сумматор 11, датчик 12 скорости исполнительного механизма, второй сумматор 13, релейный элемент 14. Цель изобретения достигается за счет связи выхода релейного элемента с третьим, а выхода первого сумматора - с четвертым входам и суммирующего усилителя. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1987 |
|
SU1442973A1 |
| Следящий электропривод | 1985 |
|
SU1332260A2 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| Способ автоматического регулирования координат электропривода и устройство для его осуществления | 2017 |
|
RU2660183C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |

Изобретение относится к области автоматизированного электрсшривода и может быть использовано при автоматическом регулировании положения ис- полнительных устройств.
Цель изобретения - упрощение.
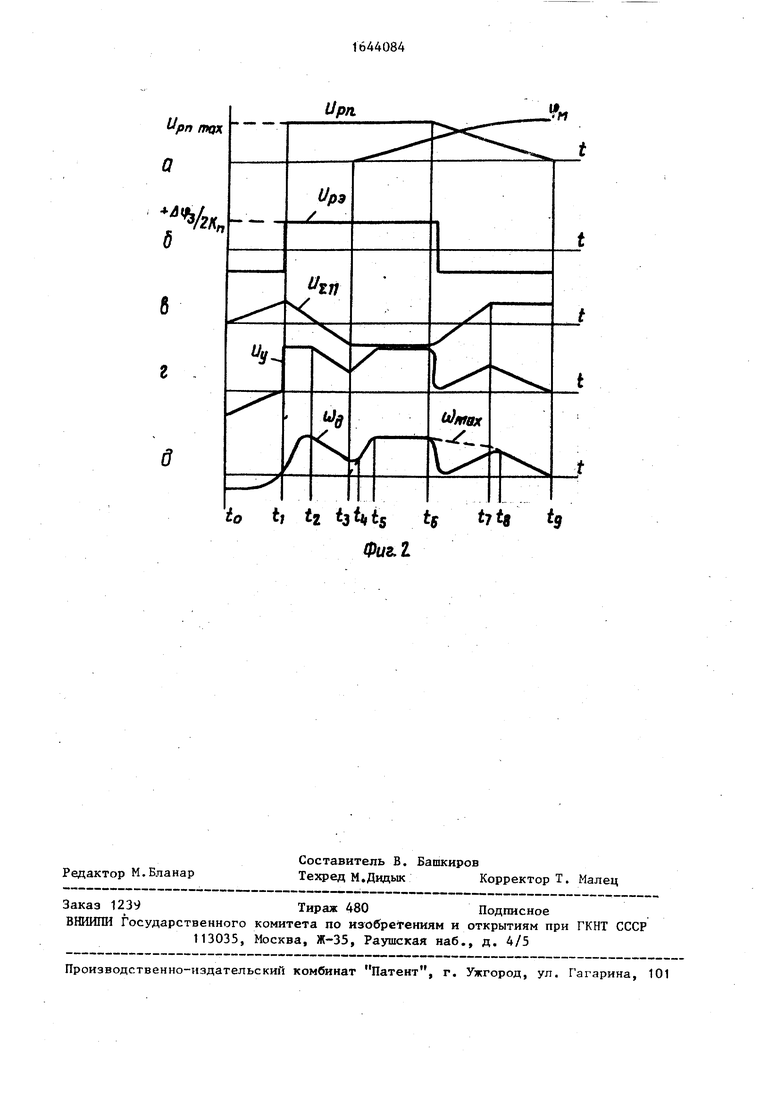
На фиг. 1 представлена функциональная схема следящего электропривода; на фиг. 2 - эпюры, поясняющие его pa- боту.
Следящий электропривод содержит (фиг. 1) регулятор 1 положения, суммирующий усилитель 2, регулятор 3 скорости, усилитель 4 мощности, двига- тель 5, датчик 6 скорости двигателя и датчик 7 положения двигателя, редуктор 8, исполнительный механизм 9, датчик 10 положения исполнительного механизма, первый сумматор 11,датчик 12 скорости исполнительного механизма, второй сумматор 13 и релейный элемент 14.
Следящий электропривод работает следующим образом.
В исходном положении с обоих дат- ;чиков 7 и 10 положения на сумматор 11 поступают равные сигналы, а двигатель в это время находится в середине зазора. В момент времени tQ произошло включение электропривода и на выходе релейного элемента 14 появилось отрицательное напряжение - Ц),/2КП (фиг. 26).
На выходе усилителя 2, следователь но, также появляется напряжение, и двигатель 5 начинает вращаться в отрицательном направлении до тех пор, пока в момент времени t напряжение с выхода релейного элемента 14 не уравновесится напряжением с выхода сумматора 11, при этом зазор в передаче оказывается выбранным. При этом выходной сигнал сумматора 11 равен
U
идом иДПД
и
ДПАЛ
где U .пд - выходной сигнал датчика
положения двигателя; - выходной сигнал датчика
положения механизма. В момент времени t (фиг. 2) на вход регулятора 1 положения поступает положительный сигнал управления U, которьй приводит к насыщению регулятора 1 положения, и его выходной сигнал становится равным Unn /макс (фиг. 2а). На выходе усилителя 2 появляется напряжение 1Ц, которое, поступая на вход сумматора 13, вызывает срабатывание релейного элемента 14. Релейный элемент выполнен с ограничением выходного сигнала на уровне п и , эта величина определяется величиной зазора в механической передаче. При сигнале управления с усилителя 2, большем, чем скорость исполнительного механизма, на третий вход усилителя 2 поступает сигнал и его выходное напряжение будет равно Uu мацс(фиг. 2г). За время t,-t2 двигатель разгоняется и при большой величине зазора его частота вращения может достичь максимального значения СО длох (Фиг. 2д). Одновременно с началом движения с датчика 7 положения двигателя начинает поступать сигнал , в результате чего на выходе сумматора 11 напряжение, поступающее на четвертый вход усилителя 2, уменьшается. Но этой причине в момент времени tЈ усилитель 2 выходит из насыщения («риг. 2г) .
За время напряжение Uu уменьшается до напряжения, которому соответствует разность частот вращения двигателя и исполнительного механизма, обусловленная допустимым уровнем динамических перегрузок в механической передаче в момент зацепления. Коэффициент усиления усилителя 2 по первому входу меньше единицы и равен
К,
UjfiL Upn мех
где U ,. - напряжение управления при 63
входе в зацепление.
При этом обеспечивается максимальная скорость прохождения зазора.
За время происходит процесс зацепления и на отрезке времени . механизм разгоняется до максимальной частоты вращения за счет появления на втором входе усилителя 2 сигнала положительной обратной связи с датчика 12. При этом сумма сигналов.по третьему и четвертому входам усилителя 2 равна нулю, так как зазор выбран. Коэффициент усиления усилителя 2 по второму входу определяется из условия
К .ЕС..УЩ iJ2 K-CO еу мох
где К - коэффициент датчика 12; (О - максимально допустимая частота вращения механизма 9.
Механизм 9 движется с максимальной скоростью до момента времени tg, когда регулятор 1 положения выходит из насыщения (фиг. 2а) , вследствие чего двигатель начинает тормозиться и теряет зацепление с механизмом. При этом меняется знак выходного сигнала сумматора 13, срабатывает релейный элемент 14, и ня его выходе появляется напряжение -Ц)/2КМ. В результате этого напряжение на выходе усилителя 2 резко уменьшается и начинается интенсивное торможение двигателя (фиг. 2д),
Изменение частоты вращения двигателя обусловлено изменением сигналов с регулятора 1 положения,сумматора 11 и релейного элемента 14.
В момент времени tT, когда двигатель вновь входит в зацепление с механизмом, сумма сигналов с сумматора 11 и релейного элемента 14 равна нулю и, следовательно, разность между частотами вращения двигателя и исполнительного механизма не больше допустимой.
За время tT-tg происходит зацепление с механизмом и начинается эффективное торможение электропривода под действием сигнала с регулятора положения.
В момент времени t следящий электропривод отрабатывает заданное значение .
Эффект упрощения конструкции электропривода достигается за счет подключения выхода релейного элемента, входом связанного с выходом второго сумматора, к третьему входу усилителя, а выхода первого сумматора - к четвертому входу усилителя. Это позволяет исключить дополнительный релейный элемент, два управляемых клю- чевых элемента, два сумматора и источник напряжения смещения с разнополяр- ными выходами, снижающие надежность электропривода. Таким образом дости- Q гается существенное упрощение конструкции электропривода и, как следствие, повышение надежности следящего электропривода.
5 Фо-рмула изобретения
Следящий электропривод, содержащий последовательно соединенные регулятор положения, суммирующий усилитель, ре0 гулятор скорости, усилитель мощности, двигатель, редуктор, исполнительный механизм, выходной вал которого через датчик скорости исполнительного механизма связан с вторым входом суммиру5 ющего усилителя, а через датчик положения исполнительного механизма - с входом регулятора положения и первым входом первого сумматора, к второму входу которого через датчик положения
0 двигателя подключен выход двигателя, соединенный также через датчик скорости двигателя с вторым входом регулятора скорости, выход суммирующего усилителя подключен к первому входу второго сумматора, соединенного вторым входом с выходом датчика скорости исполнительного механизма, а выходом - с входом релейного элемента, отличающийся тем, что, с целью
0 упрощения, выход релейного элемента соединен с третьим, а выход первого сумматора - с четвертым входами суммирующего усилителя.
5
to tf tz bbts Ь § Фиг. I
