Изобретение относится к автоматике и вычислительной технике, в частности к средствам коммутации шаговых двигателей, применяемым в исполнительных устройствах автоматики и вычислительной техники.
Целью и эобретения является расширение функциональных возможностей устройства за счет обеспечения управ- Q ления шаговым двига.телем, рабочая частота вращения ротора которого превышает максимальную частоту его.тро- гания.
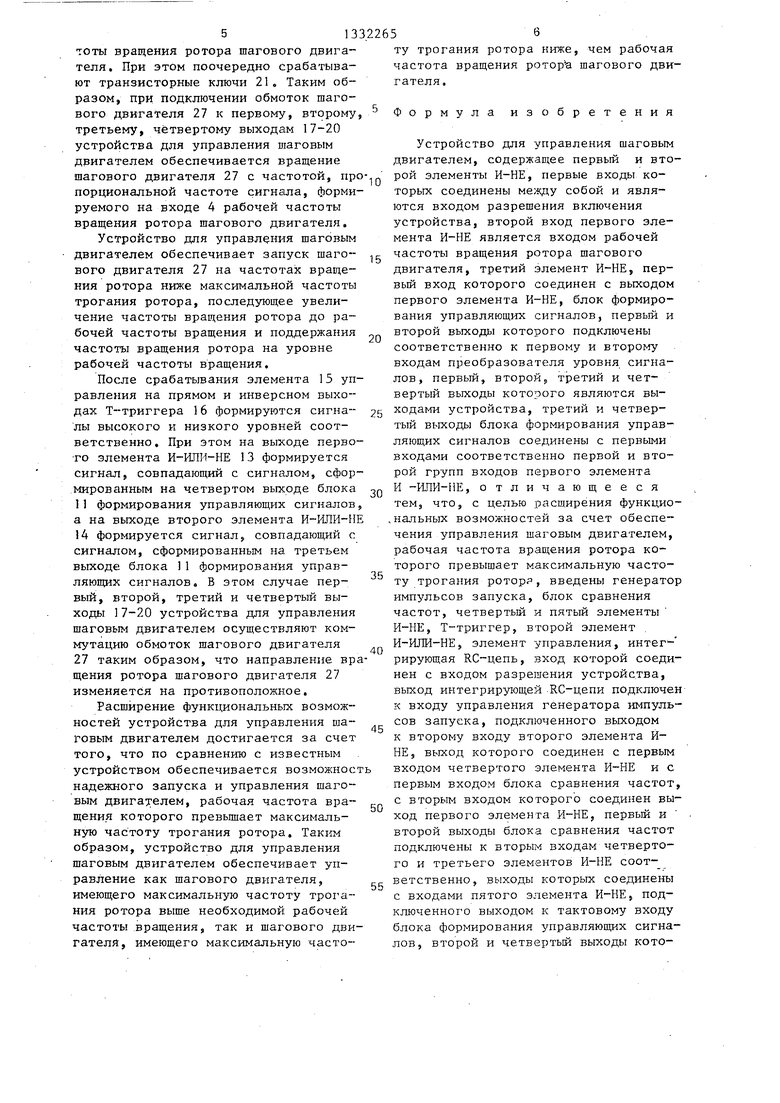
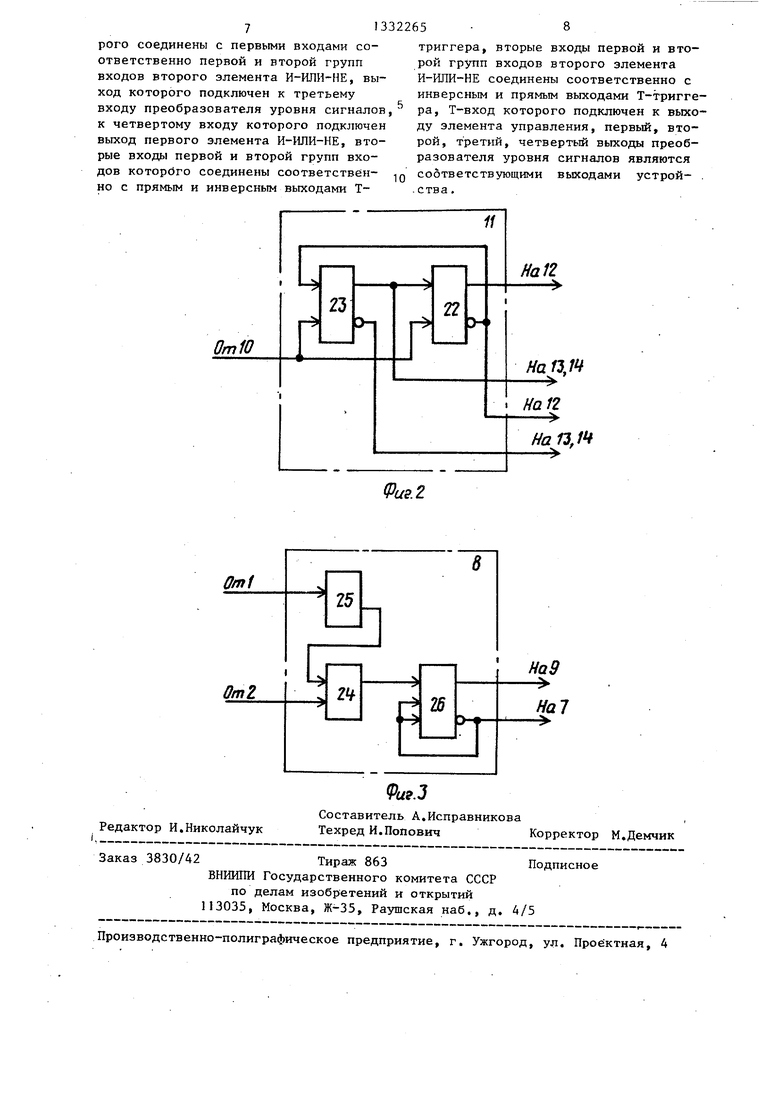
На фиг.1 приведена структурная схема устройства для управления шаговым двигателем; на фиг,2 - структурная схема блока формирования управляющих сигналов; на фиг.З - структурная схема блока сравнения частот.
Устройство содержит первый 1 и , второй 2 элементы И-НЕ, вход 3 разрешения включения устройства,вход 4 рабочей частоты вращения ротора шагового двигателя, интегрирующую RC- цепь 5, генератор 6 импульсов запуска, четвертый элемент И-НЕ 7, блок 8 сравнения частот, третий 9 и пятый 10 элементы И-НЕ, блок 11 формирования
Блок 11 формирования управляющих сигналов необходим для преобразования последовательности импульсов, поступающих на тактовый вход, в четыре последовательности сигналов, сдвинутых между собой по фазе на 90, Необходимость таких сигналов вызвана режимом работы используемого шагового двигателя.
Блок 11 формирования управляющих сигналов работает как сдвиговый регистр, состоящий из первого 22 и второго 23 тактируемых D-триггеров, состояние которых изменяется по каждому импульсу, формируемому на тактовом входе блока 11 формирования управляющих сигналов. При этом сигнал, сформированный на инверсном выходе первого тактируемого D-триггера 22, переписьгоается на вход данных второго тактируемого D-триггера 23, а сигнал, сформированный, на прямом выходе второго тал стируемого D-триггёра 23, 25переписывается на вход данных первого тактируемо1 О D-триггера 22,
Таким образом сигналы на соответственных выходах первого 22 и второго 23 тактируемых D-триггеров
15
20
управляющих сигналов, преобразователь 30 оказываются сдвинутыми между собой по
фазе на 90 ,
12уровня сигналов, элементы И-ИЛИ-НЕ
13и 14, элемент 15 управления, Т триггер 16, первый - четвертый выходы 17-20 устройства.
Преобразователь 12 уровня сигналов gg вьтолнен в виде четырех независимьрс транзисторных ключей 21, выходы которых являются первым, вторым, третьим и четвертым выходами преобразователя 12 уровня сигналов, первый, второй, 40 третий и четвертый входы которого являются управляк1щими входа ми транзисторных ключей 21,
Блок 11 формирования управляющих сигналов вьшолнен в виде первого 22 5 и второго 23 тактируемых D-триггеров,
Блок 8 сравнения частоты выполнен в Bi-ще первого 24 и второго 25 счетчиков и тактируемого 1К-триггера 26,
Устройство также содержит шаговый Q .двигатель 27, входы обмоток которого соединены с первым - четвертым выходами 17-20 устройства.
Устройство для управления шаговым
следовательно, при формировании последовательности импульсов на тактовом входе блока, 11 формирования управляющих сигналов на.его первом, третьем, втором и четвертом выходах формируются четыре последовательности сигналов, сдвинутых между собой по фазе на 90°,
Блок 8 сравнения частот необходим для определения момента превышения частоты генератора 6 за пуска над частотой сигнала, формируемого на входе 4 рабочей частоты вращения ротора шагового двигателя.
Если частота сигнала, сформированного на первом входе блока 8 сравнения частот меньше частоты сигнала, сформированного на втором входе блока 8 сравнения частот, то второй счетчик 25 заполняется быстрее.первого счетчика 24, Таким образом, на выходе переноса второго счетчика 25 формируется импульс положительной полярности, обнуляющий первый счетчик 24.
двигателем работает следующим образом egВ этом случае состояние тактируемого
Перед началом работы все триггеры1К-триггера 26 не изменяется. Следои счетчики, входящие в состав уст- .вательно, на первом и втором выходах
ройства для управления шаговым дви-блока 8 сравнения частот сформировагателем,,обнулены.ны сигналы высокого и низкого уровней
Блок 11 формирования управляющих сигналов необходим для преобразования последовательности импульсов, поступающих на тактовый вход, в четыре последовательности сигналов, сдвинутых между собой по фазе на 90, Необходимость таких сигналов вызвана режимом работы используемого шагового двигателя.
Блок 11 формирования управляющих сигналов работает как сдвиговый регистр, состоящий из первого 22 и второго 23 тактируемых D-триггеров, состояние которых изменяется по каждому импульсу, формируемому на тактовом входе блока 11 формирования управляющих сигналов. При этом сигнал, сформированный на инверсном выходе первого тактируемого D-триггера 22, переписьгоается на вход данных второго тактируемого D-триггера 23, а сигнал, сформированный, на прямом выходе второго тал стируемого D-триггёра 23, 5переписывается на вход данных первого тактируемо1 О D-триггера 22,
Таким образом сигналы на соответственных выходах первого 22 и второго 23 тактируемых D-триггеров
5
0
фазе на 90 ,
следовательно, при формировании последовательности импульсов на тактовом входе блока, 11 формирования управляющих сигналов на.его первом, третьем, втором и четвертом выходах формируются четыре последовательности сигналов, сдвинутых между собой по фазе на 90°,
Блок 8 сравнения частот необходим для определения момента превышения частоты генератора 6 за пуска над частотой сигнала, формируемого на входе 4 рабочей частоты вращения ротора шагового двигателя.
Если частота сигнала, сформированного на первом входе блока 8 сравнения частот меньше частоты сигнала, сформированного на втором входе блока 8 сравнения частот, то второй счетчик 25 заполняется быстрее.первого счетчика 24, Таким образом, на выходе переноса второго счетчика 25 формируется импульс положительной полярности, обнуляющий первый счетчик 24.
соответственно. Если частота сигнала сформированного на первом входе блока 8 сравнения частот, больше частоты сигнала, сформированного на втором входе блока 8 сравнения частот, то первый счетчик 24 заполняется быстрее второго счетчика 26. Таким образом, на выходе переноса первого счетчика 24 формируется импульс поло жительной полярности, обеспечивающий, срабатывание тактируемого IK- триггера 26, на I- и К-входах которого сформированы сигналы высокого уровня. В этом случае состояние так- тируемого 1К-триггера 26 изменяется на противоположное, так что йа его I- и К-входах формируются сигналы низкого уровня. Следовательно, на певом и втором выходах блока 8 сравне- НИН частот формируются сигналы низкого и высокого уровней соответственно.
На входе 4 рабочей частоты вращения ротора шагового двигателя фор- мируется последовательность импульсов, частота которых пропорциональна рабочей частоте вращения ротора. После сформирования сигнала высокого уровня на входе 3 разрешения устрой- ства, сигналы, сформированные на входе 4 рабочей частоты вращения шагового двигателя и на выходе генератора 6 импульсов запуска, поступают на выход первого 1 и второго 2 элементов И-НЕ соответственно. Сигнал высокого уровня, сформированный на входе 3 разрешения устройства, интегри- pyetcя КС-цепью 5 и поступает на управляющий вход генератора 6 запуска. При этом частота сигнала, формируемого генератором 6 запуска, возрастает пропорционально амплитуде выходного сигнала интегрирующей КС-цепи 5. Если частота сигнала, форми- руемого на выходе второго элемента И-НЕ 2, меньше, чем частота сигнала, формируемого на выходе первого элемента И-НЕ 1, то на первом и втором выходах блока 8 сравнения частот фор- мируются сигналы высокого и низкого уровней соответственно. В этом случае на выходе третьего элемента И-НЕ
9формируется сигнал высокого уровня, а на выходе пятого элемента И-НЕ
10формируются сигналы с частотой, определяемой частотой генер атора 6 запуска. На первом, втором, третьем и четвертом выходах блока 11 форми
п
5 Q 0 5 Q
5
5
рования управляющих сигналов формируются четыре последовательности сиг-) налов, сдвинутых между собой по фазе на 90. Частота сигналов в каждой последовательности определяется частотой сигнала генератора 6 запуска.
Если на прямом и инверсном выходах Т-триггера 16 сформированы сигналы низкого и высокого уровней, то на выходе первого элемента И-ИЛИ-НЕ 13 формируется сигнал, совпадающий с сигналом, сформированным на третьем выходе блока 11 формирования управляющих сигналов, а на выходе второго элемента И-ИЛИ-НЕ 14 формируется сигнал, совпадающий с сигналом, сформированным на четвертом выходе блока 11 формирования управляющих сигналов . На первом, третьем, втором и четвертом входах преобразователя 12 уровня сигналов формируются четыре последовательности сигналов, сдвинутых между собой по фазе на 90°. При этом поочередно срабатывают транзисторные ключи 21. Таким образом, при подключении обмоток шагового двигателя к первому, второму, третьему и четвертому выходам 17-20 устройства для управления шаговым двигателем обеспечивается запуск шагового двигателя 27 с частотой вращения ротора ниже максимальной частоты трогания ротора шагового двигаля. Частота вращения ротора шагового двигателя пропорциональна частоте сигнала генератора 6. При возрастании частоты сигнала генератора 6 частота вращения ротора шагового двигателя возрастает.
Если частота сигнала, формируемого на выходе второго элемента И-НЕ 2, превысит частоту сигнала, формируемо- го на выходе первого элемента И-НЕ 1, то на первом и втором выходах блока 8 сравнения частот формируются сигналы низкого и высокого уровней соответственно. В этом случае на выходе пятого элемента И-НЕ 10 формируются сигналы с частотой, определяемой частотой сигнала на входе 4 рабочей частоты вращения ротора шагового двигателя. На первом, третьем, втором и четвертом выходах блока 11 формирования управляющих сигналов формируются четыре последовательности сигналов, сдвинутых между собой по фазе на 90. Частота сигналов в каждой последовательности определяется частотой сигнала на входе 4 рабочей частоты вращения ротора шагового двигателя. При этом поочередно срабатывают транзисторные ключи 21« Таким образом, ПРИ подключении обмоток шагового двигателя 27 к первому, второму третьему, четвертому выходам 17-20 устройства для управления шаговым двигателем обеспечивается вращение шагового двигателя 27 с частотой, пр порциональной частоте сигнала, формируемого на входе 4 рабочей частоты вращения ротора шагового двигателя,
Устройство для управления шаговым двигателем обеспечивает запуск шаго- вого двигателя 27 на частотах вращения ротора ниже максимальной частоты трогания ротора, последующее увеличение частоты вращения ротора до рабочей частоты вращения и поддержания частоть вращения ротора на уровне рабочей частоты вращения,
После срабатывания элемента 15 управления на прямом и инверсном выходах Т-триггера 16 формируются сигна- лы высокого и низкого уровней соответственно , При этом на выходе перво то элемента И-ИЛИ-НЕ 13 формируется сигнал, совпадающий с сигналом, сформированным на четвертом выходе блока 11 формирования управляющих сигналов а на выходе второго элемента И-ИЛИ-Н 14 формируется сигнал $ совпадающий с сигналом, сформированным на третьем выходе блока 1 формирования управляющих сигналов, В этом случае пер- вый, второй, третий и четвертый выходы 17-20 устройства для управления шаговым двигателем осуществляют коммутацию обмоток шагового двигателя 27 таким образом, что направление врщения ротора шагового двигателя 27 изменяется на противоположное,
Расширение функциональных возможностей устройства для управления ша говьш двигателем достигается за счет того, что по сравнению с известным устройством обеспечивается возможнос надежного запуска и управления шаговым двига7;елем, рабочая частота вращения которого превышает максимальную частоту трогания ротора. Таким образом, устройство для управления шаговым двигателем обеспечивает управление как шагового двигателя, имеющего максимальную частоту трогания ротора выше необходимой рабочей частоты вращения, так и шагового двигателя, имеющего максимальную часто
g
5 о
5
0
5
ту трогания ротора ниже, чем рабочая частота вращения ротор а шагового двигателя.
Формула изобретения
Устройство для управления шаговым двигателем, содержащее первый и второй элементы И-НЕ, первые входы которых соединены ме;«ду собой и являются входом разрешения включения устройства, второй вход первого элемента И-НЕ является входом рабочей частоты вращения ротора шагового двигателя, третий элемент И-НЕ, первый вход которого соединен с выходом первого элемента И-НЕ, блок формирования управляющих сигналов, первый и второй выходы которого подключены соответственно к первому и второму входам преобразователя уровня сигналов, первый, второйр третий и четвертый выходы которого являются выходами устройства, третий и четвертый выходы блока формирования управляющих сигналов соединены с первыми входами соответственно первой и второй групп входов первого элемента И -ИЛИ-НЕ, отличающееся тем, что, с целью расширения функцио- ,нальных возможностей за счет обеспечения управления шаговым двигателем, рабочая частота вращения ротора которого превышает максимальную частоту трогания роторя, введены генератор импульсов запуска, блок сравнения частот, четвертьй и пятый элементы И-НЕ, Т-триггер, второй элемент , И-ИЛИ-НЕ, элемент управления, интег- рирующая RC-цепь, вход которой соединен с входом разрешения устройства, выход интегрирующей RC-цепи подключен к входу управления генератора импульсов запуска, подключенного выходом к второму входу второго элемента И- НЕ, выход которого соединен с первым входом четвертого элемента И-НЕ и с первым входом блока сравнения частот, с вторым входом которого соединен выход первого элемента И-НЕ, первый и второй выходы блока сравнения частот подключены к вторым входам четвертого и третьего элементов И-НЕ соответственно, выходы которых соединены с входами пятого элемента И-НЕ, подключенного выходом к тактовому входу блока формирования управляюш х сигналов, второй и четвертый выходы которого соединены с первыми входами соответственно первой и второй групп входов второго элемента И-ИЛИ-НЕ, выход которого подключен к третьему входу преобразователя уровня сигналов к четвертому входу которого подключен выход первого элемента И-ИЛИ-НЕ, вторые входы первой и второй групп входов KOTOpdro соединены соответственно с прямым и инверсным выходами Т23
От 10
Omi
25
2265 8
триггера, вторые входы первой и второй групп входов второго элемента И-ИЛИ-НЕ соединены соответственно с инверсным и прямым выходами Т-тригге- ра, Т-вход которого подключен к выходу элемента управления, первый, второй, третий, четвертый выходы преобразователя уровня сигналов являются соответствующими выходами устрой- . ства.
5
0
На 12
п
ЯаГЗ,/
Han,
(Pus. 2

| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2725619C1 |
| Шаговый электропривод | 1989 |
|
SU1690167A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2719604C1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ ЭЛЕКТРОПРИВОДА НА ОСНОВЕ ДВУХОБМОТОЧНОГО ШАГОВОГО ДВИГАТЕЛЯ, РАБОТАЮЩЕГО В ПОЛНОШАГОВОМ РЕЖИМЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2774923C1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Устройство для вычисления статического момента вентильного электропривода | 1979 |
|
SU947880A1 |
| Система программного управления | 1982 |
|
SU1022116A1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ФОРМИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2125836C1 |
Изобретение относится к автоматике и вычислительной технике, в частности к средствам коммутации шаговых двигателей (ШД), применяемых в исполнительных устройствах автоматики и вычислительной техники. Цель изобретения - расширение функциональных возможностей за счет обеспечения управления ШД, рабочая частота вращения ротора которого превьшает максимальную частоту его трогания. Устройство обеспечивает запуск ШД 27 на частоте заведомо ниже максимальной частоты трогания ротора,увеличение скорости вращения ро.тора ШД 27 пропорционально росту частоты генератора 6 импульсов з.апуска, стабилизацию скорости вращения ротора ШД 27 на частоте, определяемой частотой сигнала, формируемого на входе 4 рабочей частоты вращения ШД. 3 ил. (Л СО ОО к ISD О) ел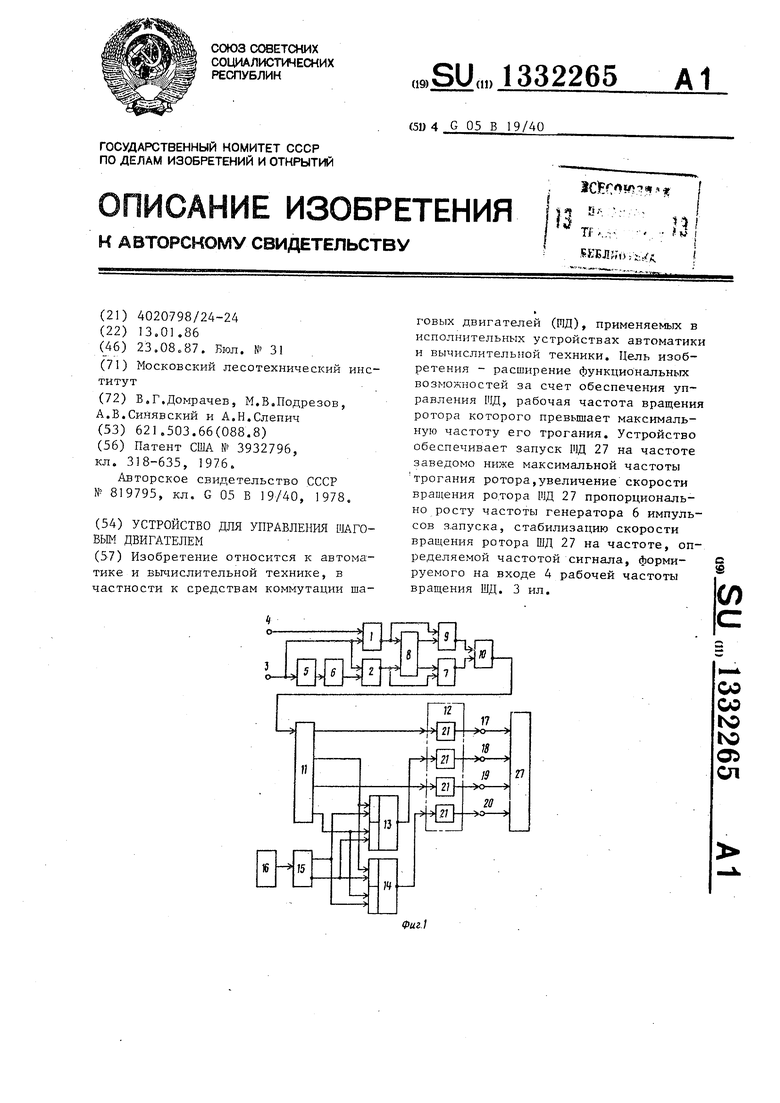
Редактор И.Николайчук
9u9.3
Составитель А.Исправникова Техред И.Попович
Заказ 3830/42
Тираж 863
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Демчик
Подписное
| Патент США № 3932796, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
