113
Изобретение относится к электротехнике и может быть использовано в следящих систем автоматики.
Цель изобретения - улучшение регулировочных характеристик и массогаба- ритных показателей вентильного электродвигателя.
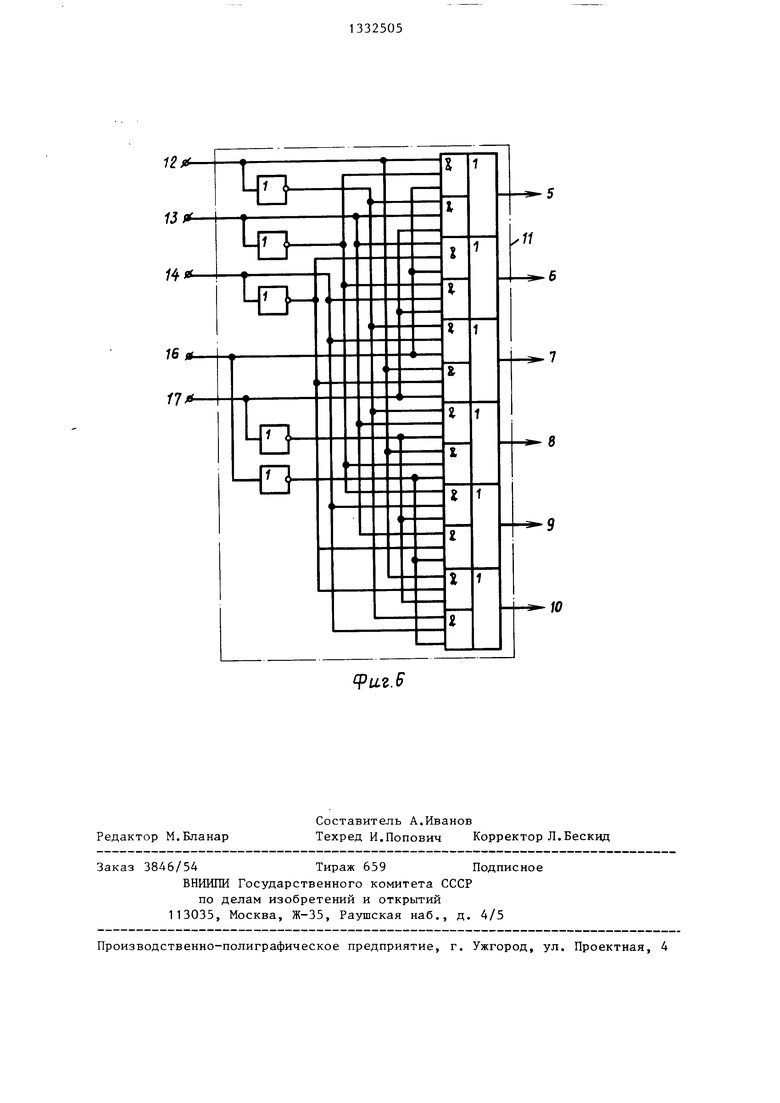
На фиг.1 изображена функциональная схема двигателя; на фиг.2 - диаграммы, поясняющие работу генератора пилообразного напряжения и компараторов; на фиг.З - диаграммы, поясняющие работу функционального преобразователя при нулевом сигнале управления; на фиг.4 - то же, при положительном сигнале управления; на фиг.5 - то же, при отрицательном сигнале управления; на фиг.6 - реализация функционального преобразователя на логических элементах.
Управляемьш вентильный электродвигатель содержит электромеханический преобразователь, обмотки 1 - 3 которого подключены к выходу мостового полупроводникового коммутатора 4, входы управления ключей 5-10 которого подключены к выходу функционального преобразователя 11 сигналов управле
ния с основными входами 12 - 14, по
ключенными к выходу датчика 15 положения ротора, и двумя управляющими входами 16 и 17.
Кроме того, управляемый вентильный электродвигатель содержит генертор 18 треугольного напряжения и дв компаратора 19 и 20, выходы которых подключены к управляющим входам 16 и 17 функционального преобразовател 11, прямые входы у коммутаторов 19 и 20 объединены и подключены к генератору 18 треугольного напряжения. Второй прямой вход компаратора 20 и инверсный вход компаратора 19 объдинены и являются входом управления вентильного электродвигателя. Функц ональньм преобразователь реализует следующую систему булевых функций:
а хута+Хуп;
b yzm+yzn;
c zxm+zxn;
d xym+xyn;
e yzm+yzn;
f zxm+zxn,
где a,b,c,d,e,f - выходные сигналы преобразователя, поступающие на вхды силовых ключей
0
505
5
5
0
2
5-10 соответственно;x,y,z - выходные сигналы датчика
положения ротора, поступающие на входы 12 - 14 функционального преобразователя соответственно; m - сигнал Uj,, с выхода компаратора 20, поступающий на вход 16 преобразователя 11; п - сигнал с выхода компаратора 19, поступающий на вход 17 преобразователя 11. Функциональный преобразователь 11 может быть реализован на логических элементах (фиг.6) или на постоянно запоминающем устройстве.
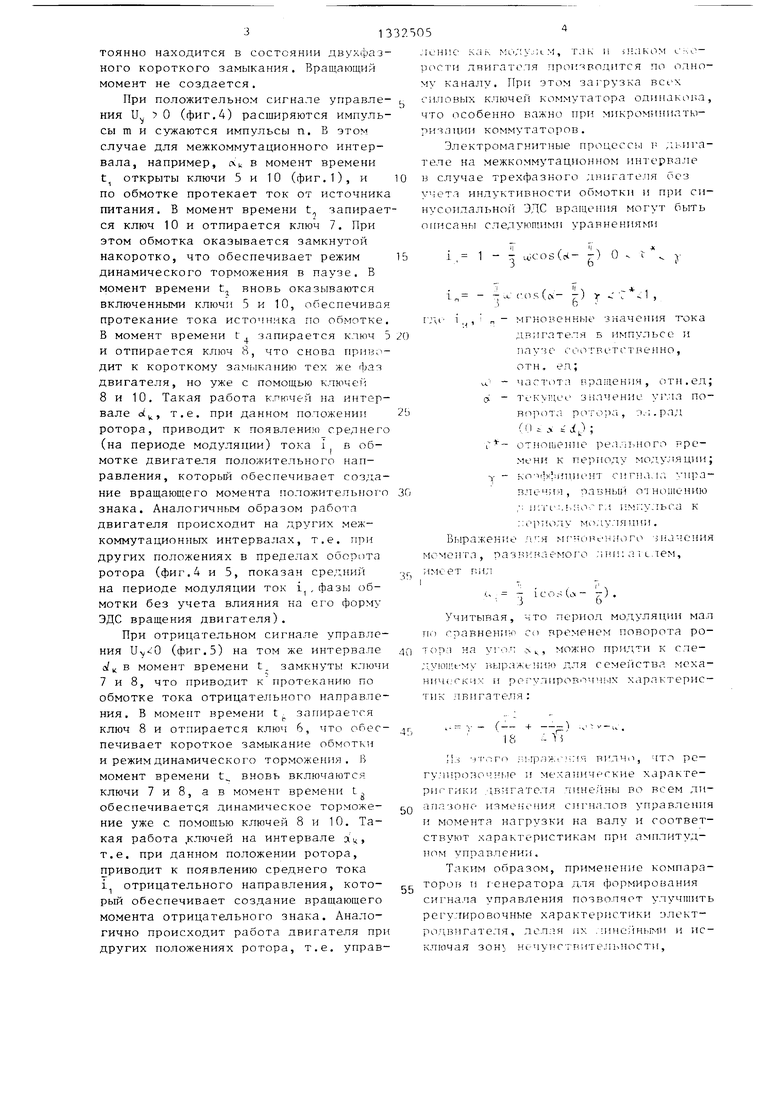
Управляемый вентильный электродвигатель работает следующим образом. Сигнал и.а (фиг.2) с выхода генерао компаратора 20
тора 18 пилообразного напряжения 18
поступает на первые (неинвертирующие) входы компараторов 20 и 19. Сигнал управления U, поступает на второй (неинвертирующий) вход компаратора 20 и второй (инвертирующий) вход компаратора 19. В результате сравнения эквивалентного входного напряжения
() и эквивалентного входного напряжения компаратора 19 () с напряжением нулевого уровня на их выходах формируются импульсные сигналы и и
соотйетст5
0
5
0
5
венно. При этом в случае равенства нулю сигнала управления U импульсы и и равны по длительности, имеют скважность, равную двум (длительность импульса равна длительности паузы), и совпадают во времени. При положительных сигналах управления длительность импульсов и увеличивается, а длительность импульсов U, уменьшается пропорционально модулю Us,. При отрицательном и, наоборот, растет длительность импульсов и и падает длительность импульсов . Сформированные таким образом напряжения U, и U подаются на входы функционального преобразователя 11, на другие входы которого поступают сигналы от датчика положения ротора.
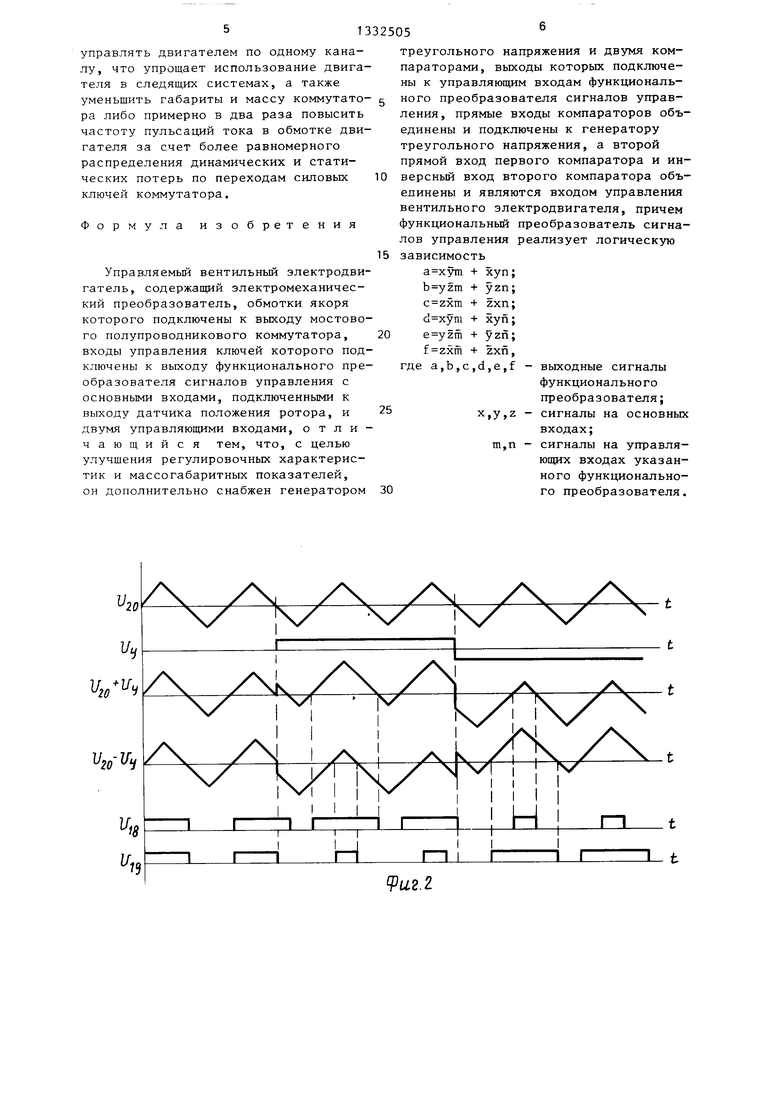
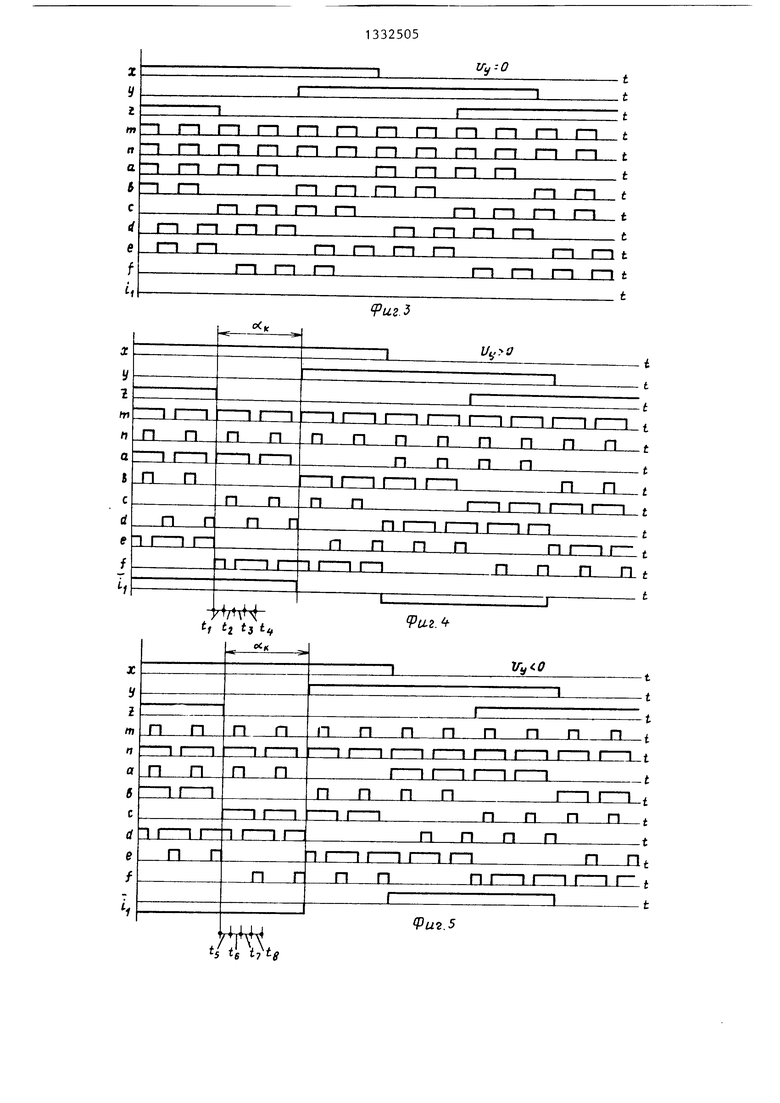
Из диаграммы работы функционального преобразователя 11 при (фиг.З) видно, что в любой момент времени сигналы с его выхода поступают на два ключа одной из групп (анодной или катодной) мостового коммутатора. При этом обмотка двигателя постоянно находится в состоянии двухфазного короткого замыкания. Вращающий момент не создается,
При положительном сигнале управле- НИН и,, О (фиг, 4) расширяются импульсы m и сужаются импульсы п, В этом случае для межкоммутационного интервала, например, л в момент времени t открыты ключи 5 и 10 (фиг,1), и по обмотке протекает ток от источника питания, В момент времени t запирается ключ 10 и отпирается ключ 7. При этом обмотка оказывается замкнутой накоротко, что обеспечивает режим динамического торможения в паузе, В момент времени t вновь оказываются включенными ключи 5 и 10, обеспечивая протекание тока источника по обмотке, В момент времени t запирается ключ 5 и отпирается ключ 8, что снова приводит к короткому зa rыкaнию тех же фаз двигателя, но уже с помощью ключе ; 8 и 10, Такая работа ключей на интервале d, т,е, при данном положении ротора, приводит к появлению среднего (на периоде модуляции) тока i в обмотке двигателя положительного направления, который обеспечивает создание вращающего момента положительног о знака. Аналогичным образом работа двигателя происходит на других меж- коммутацион1 ьгх интервалах, т,е, при других положениях в пределах оборпта ротора (фиг, 4 и 5, показан средний на периоде модуляции ток i , фазы обмотки без учета влияния на его форму ЭДС вращения двигателя).
При отрицательном сигнале управления (фиг, 5) на том же интервале (к в момент времени t. замкнуты ключи 7 и 8, что приводит к протеканию по обмотке тока отрицательного направления, В момент времени t запирается ключ 8 и отпирается ключ 6, что обес- печивает короткое замыкание обмотки и режим динамического торможения, В момент времени t вновь включаются ключи 7 и 8, а в момент времени L обеспечивается динамическое торможение уже с помощью ключей 8 и 10, Такая работа .ключей на интервале аК, т,е, при данном положенрш ротора, приводит к появлению среднего тока
1 отрицательного направления, который обеспечивает создание вращающего момента отрицательного знака. Аналогично происходит работа двигателя при других положениях ротора, т,е, управлинис как Mo; y.:;iM, так li ;наком INO- рости двигателя производится по одному каналу. При этом загрузка всех с иловых ключей коммутатора одинакова, что особенно важно при микроминиатюризации коммутаторов,
Электромагнитные процессы г- ;;ьига- теле на межкоммутационном интервале в случае трехфазного двигателя оез У :етл индуктивности обмотки и при си- нусоидтально ЭДС вращения могут быть описаны следующими уравнениями
1 1-- n:.cos(ci- -) О 3о
/ л- 1
- - . сояСсч- -J )- Г V .1 ,
i.i п - мгно1зенные значения гока двигателя в импульсе и II а у е С С о т в С т г т в е н н о, отн, ед;
- частота вра-цения, отн,ед; ci - i4 KyiUL4- значение угла поворот; poToiia, эл.рад СП. ;jf);
- отношение реального времени к периоду модуляции; -) - KO iibi) сигнал;; vnpa- , оавньи отношению
;: ППЧ-:., ГЛ UNiTAMbCa к
::opHo;iy молуля П1И ,
Вь р;1же 1т;о л :я мг-н/тонного Л ачения ента , пазш-гвлемог о гии:: ;i , ет ГИЛ
т,
-: 3 (-- ,ч
Учитывая, но сравненик тор;) нл уго.п ;i, 1ыр;гжени: ) для семейства мсха- нич ;гких и рг- улироВ ЧН -.1Х характеристик лБигателя:
-;то периол моду ляции мал :п временем поворота ро- , можно при,дти к сле
:is TfiTrn 5;мр; /г.-м:1я вилчо, лто ре- гулирозоч-лле и ме;чаничрские характе- ригг;1ки двигателя лине.йны во всем диапазоне- n3MLMiOHnH сигн; лов управле1Н1я и момента нагрузки на валу и соответствуют характеристикам при амплитуд- управлении.
Т;1ким образом, применение компараторов и генератора для формирования сигн;гла управления позволяет улу ппить регулировочные характеристики элект- рол,в)гателя, дел;зя их , ппчсйньми и исключая зон нел л с гвителъности.
управлять двигателем по одному каналу, что упрощает использование двигателя в следящих системах, а также уменьшить габариты и массу коммутато- pa либо примерно в два раза повысить частоту пульсаций тока в обмотке двигателя за счет более равномерного распределения динамических и статических потерь по переходам силовых ключей коммутатора.
Формула изобретения
Управляемый вентильный электродвигатель, содержащий электромеханический преобразователь, обмотки якоря которого подключены к выходу мостового полупроводникового коммутатора, входы управления ключей которого подключены к выходу функционального преобразователя сигналов управления с основными входами, подключенными к выходу датчика положения ротора, и двумя управляющими входами, отличающийся тем, что, с целью улучшения регулировочных характеристик и массогабаритных показателей, он дополнительно снабжен генератором
треугольного напряжения и двумя компараторами, выходы которых подключены к управляющим входам функционального преобразователя сигналов управления , прямые входы компараторов объединены и подключены к генератору треугольного напряжения, а второй прямой вход первого компаратора и инверсный вход второго компаратора объединены и являются входом управления вентильного электродвигателя, причем функциональный преобразователь сигналов управления реализует логическую зависимость
+ хуп;
+ yzn;
+ zxn; хуп;
+
+ yzn; + zxn,
где a,b,c,d,e,f - выходные сигналы функционального преобразователя; x,y,z - сигналы на основных
входах;
m,n - сигналы на управляющих входах указанного функционального преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| Способ управления вентильным электродвигателем | 1990 |
|
SU1818675A1 |
| Инфузионный насос | 1982 |
|
SU1099967A1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2453968C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Устройство для моделирования @ -фазного вентильного двигателя постоянного тока | 1985 |
|
SU1312620A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Способ регулирования тока нагрузки вентильного преобразователя | 1985 |
|
SU1325642A1 |
| Вентильный электродвигатель | 1980 |
|
SU955398A1 |
Изобретение относится к электротехнике и может быть использовано в следящих системах автоматики. Целью изобретения является улучшение регулировочных характеристик и массога- баритных показателей. В управляемый вентильный электродвигатель введен генератор 18 треугольного напряжения и компараторы 19, 20, а функциональный преобразователь (ФП) 11 сигналов управления реализует логические зависимости a xyim+xyn, b yzm+yzn, +zxn, d xyi i+xyn, e yzm+yzn, +zxn, где a,b,c,d,e,f - выходные сигналы ФП 11; x,y,z - сигналы на основных входах ФП 11; m,n - сигналы на управляющих входах ФП 11. Это позволяет повысить линейность регулировочных характеристик, исключить зону нечувствительности, повысить частоту пульсаций в обмотке двигателя за счет более равномерного распределения динамических и статических потерь по переходам силовых ключей коммутатора 4. 6 ил. S (Л Vfi со со 1чЭ СП о ел Фиг.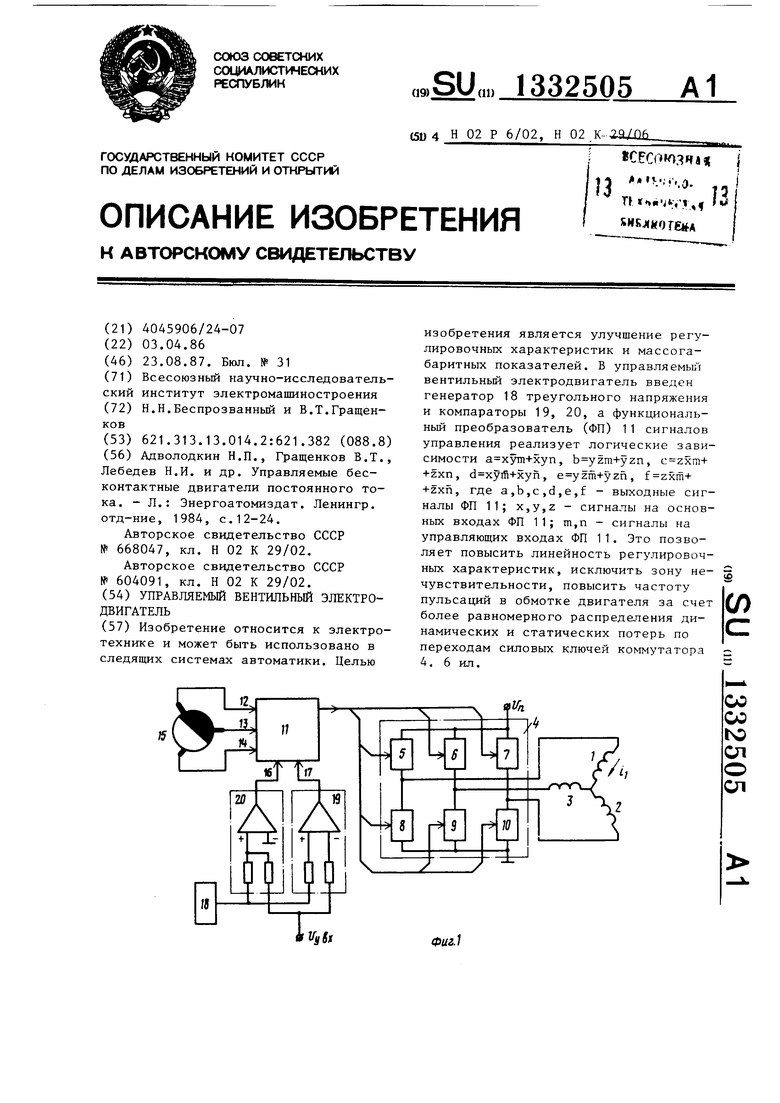
V.
20
/
7
у ,у ,ХЧ ,ХЧ
/ N/
,у ,ХЧ ,ХЧ
/ N/
N
Uu
v
/ .iv. /..
X X STT X/
/
20-Щ
/
7
1L
1 г
Ч
1
JI
L t
Фаг.2
гп r-1 f-t
t, ti tj i
Hi
n a
Редактор М.Бланар
Составитель А.Иванов
Техред И.Попович Корректор Л.Бескид
Заказ 3846/54Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
9и.г.6
| Адволодкин Н.П., Гращенков В.Т., Лебедев Н.И | |||
| и др | |||
| Управляемые бесконтактные двигатели постоянного тока | |||
| -Л.: Энергоатомиздат | |||
| Ленингр | |||
| отд-ние, 1984, с.12-24 | |||
| Управляемый вентильный электродвигатель | 1977 |
|
SU668047A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Управляемый вентильный электродвигатель | 1974 |
|
SU604091A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
