Изобретение относится к электротехнике, а именно, к вентильным электродвигателям.
Целью изобретения является уменьшение пульсаций механического момента вентильного электродвигателя.
Для достижения указанной цели при управлении вентильным двигателем путем дискретного изменения пространственного расположения магнитодвижущей силы статора дополнительно производится изменение величин магнитодвижущей силы статора обратно пропорционально функции f (о)угла поворота ротора ав пределах межкоммутационного интервала, таким образом, заявляемый способ управления вентильным двигателем соответствует критерию Новизна.
При таком способе управления величина магнитодвижущей силы статора определяется выражением
с с 1 Рс Рст Т(а)
где FCT - амплитудное значение магнитодвижущей силы статора.
С учетом (1) механический момент М, создаваемый вентильным электродвигателем при таком способе управления, определяется выражением
М К - Ррт FCT и не зависит от угла поворота ротора.
Модуляция величины магнитодвижущей силы статора обратно пропорционально функции угла поворота ротора позволяет уменьшит пульсацию механического момен00
со
о
VI
ел
та, создаваемого вентильным электродвигателем.
Управление вентильным двигателем по заявляемому способу производится следующим образом,
В вентильном электродвигателе, содержащем синхронную машину, электронный коммутатор, силовые ключи которого подключают обмотки синхронной машины к источнику питания и датчик положения ротора, представляющий собой вращающийся трансформатор (или сельсин), запи- тывают обмотку возбуждения датчика положения ротора периодическим сигналом (гармоническим или импульсным) с по- стоянной амплитудой. На основе информации о фазе напряжений сигнальных обмотках датчика положения ротора коммутатор вырабатывает сигналы включения силовых ключей (количество силовых ключей и последовательность их включения определяется количеством обмоток синхронной машины и схемой их подключения). При этом обмотки синхронной машины в той или иной комбинации подключаются к источнику питания. Чередование комбинаций подключения производится на каждом интервале коммутации, что создает дискретное с постоянным угловым шагом изменение пространственного расположения магнитодвижущей силы статора, увлекающее за собой ротор синхронной машины.
Одновременно на основе информации о текущем значении угла поворота ротора а, получаемого из анализа амплитуд нзпряже- ний на сигнальных обмотках датчика положения ротора вычисляется функция распределения магнитной индукции в воздушном зазоре синхронной машины f(o:), Например, для двухфазной четырехсекцм- оняой синхронной машины с синусоидальным распределением индукции в воздушном зазоре, в пределах межкоммутационного интервала О Ј эта функция имеет вид: f (о) 4р (sina + cosa ).
Далее производят модуляцию величины магнитодвижущей силы статора обратно пропорционально функции f(a) путем модуляции величины фазных напряжений, например, с помощью широтно-импульсной модуляции.
На фмг. 1 представлена структурная схема устройства, реализующего заявляемый способ; на фиг. 2 - функциональная схема устройства; на фиг. 3 - временные диаграммы процесса управления вентильным электродвигателем.
Вентильный электродвигатель содержит обмотки статора ,, ротор 2, датчик положения ротора 3, блок вычисления функции от угла поворота ротора 4, блок деления 5, модулятор 6 и коммутатор 7.
Вентильный электродвигатель работает следующим образом:
сигнал с датчика положения ротора 3, содержащий информацию об угле поворота ротора а , поступает на блок вычисления функции 4, на выходе которого формируется сигнал, пропорциональный функции f(a), который поступает на блок деления 5. На выходе блока деления формируется сигнал, пропорциональный Uex/ f(a), который поступает на вход модулятора 6 и далее на управляющий вход коммутатора 7, на коммутатор поступает также сигнал от датчика положения ротора. Коммутатор формирует токи об- моток статора, при этом возникает магнитодвижущая сила статора, величина которой изменяется обратно пропорционально функции от угла поворота ротора f (о). Величина механического момента при этом пропорциональна входному сигналу (Uex) и не зависит от угла поворота ротора.
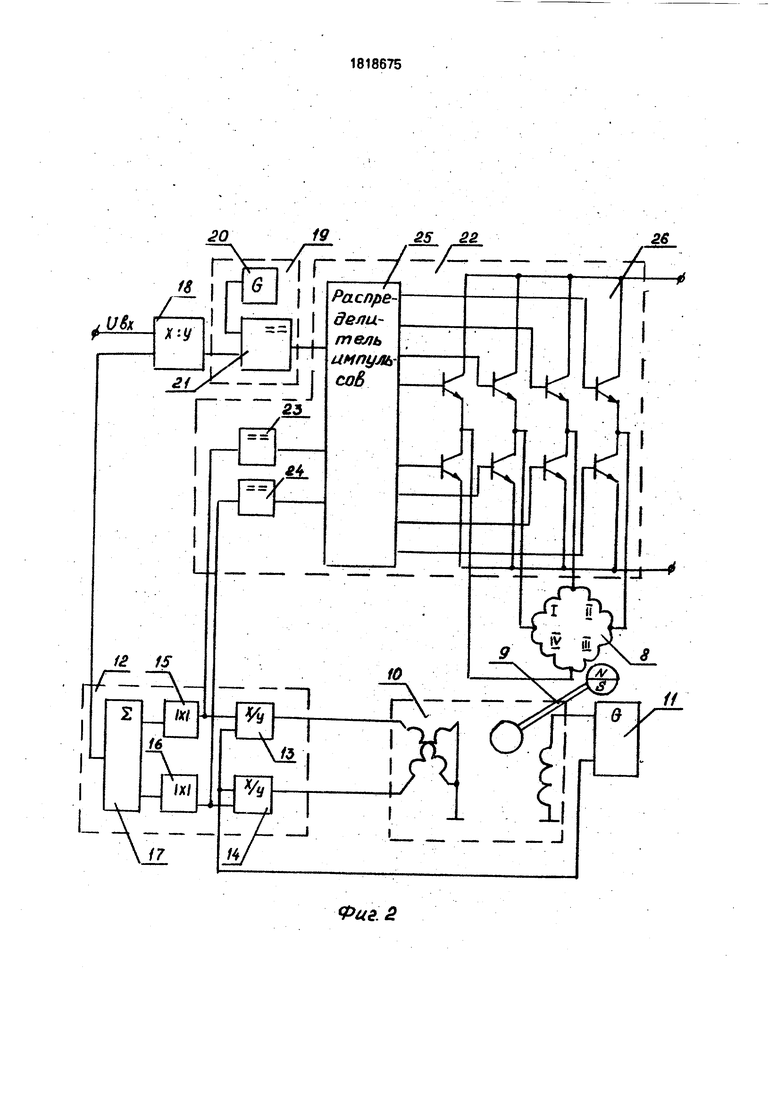
На фиг. 2 приведена функциональная схема конкретного примера вентильного двигателя с синусоидальным распределением магнитной индукции в воздушном зазоре, реализующая заявляемый способ.
Вентильный двигатель содержит обмотки статора 8, ротор в виде постоянного магнита 9, датчик положения ротора 10, представляющий собой вращающийся трансформатор, возбуждаемый генератором 11, блок вычисления функции угла поворота 12, состоящий из фазочувствительных преобразователей 13,14, выпрямителей 15, 16 и сумматора 17, блок деления 18, широт- но-импульсный модулятор 19, состоящий из генератора пилообразного напряжения 20 и компаратора 21, и коммутатор 22, в состав которого входят компараторы 23, 24, распределитель импульсов 25, стробируемый сигналом от модулятора, и силовые ключи 26.
Блок вычисления функции угла поворота ротора формирует сигнал
Ui2 ( lsln«l+ Icosa 0 Ur.Ki, где Ur - напряжение возбуждения датчика положения ротора; ; Ki - коэффициент пропорциональности.
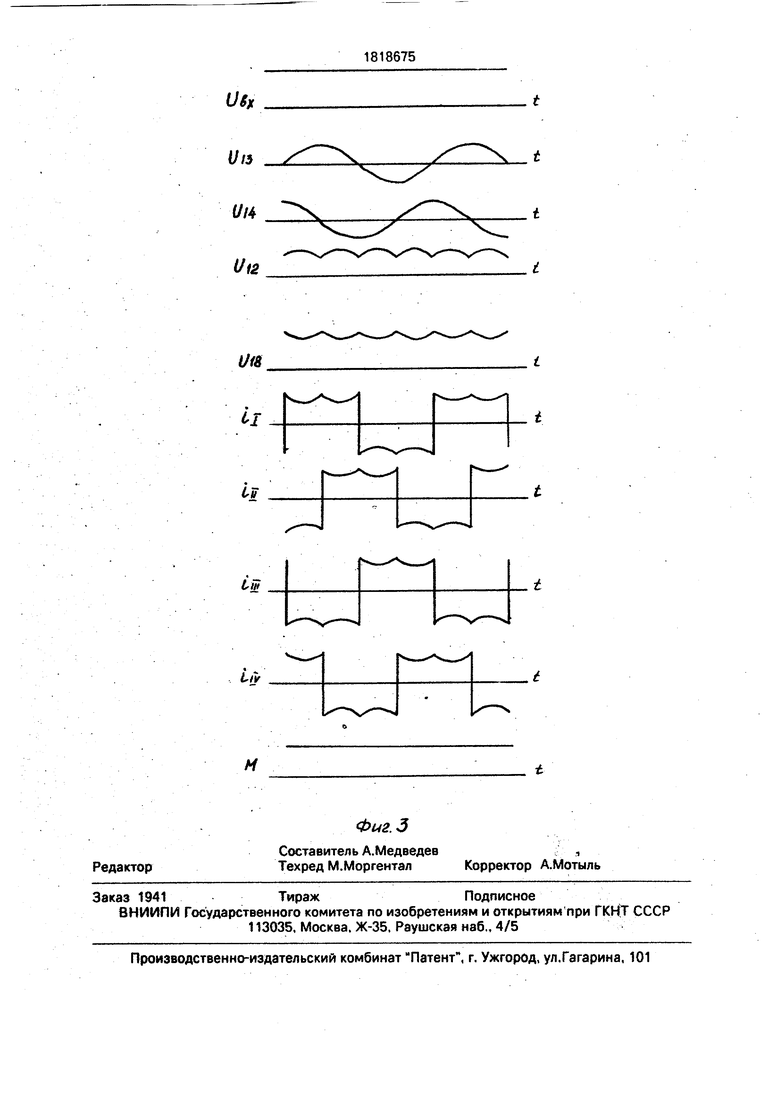
На фиг. 3 приведены временные диаграммы напряжений в характерных точках схемы вентильного двигателя, токов обмоток статора ш механического момента (М),
создаваемого вентильным электродвигателем.
Таким образом, реализация вентильного двигателя по заявляемому способу обеспечивает уменьшение пульсаций механического момента, обусловленных скачкообразным (дискретным) изменением пространственного расположения магнитодвижущей силы ротора.
Формула изобретения Способ управления вентильным электродвигателем, выполненным на базе синхронной машины, при котором по командам 15
0
датчика положения ротора коммутируют обмотки якоря синхронной машины, дискретно с постоянным угловым шагом изменяя пространственное расположение магнитодвижущей силы статора, отличающий- с я тем, что, с целью повышения равномерности вращения путем уменьшения пульсации механического момента, осуществляют модуляцию величины магнитодвижущей силы статора в пределах межкоммутационного интервала обратно пропорционально функции распределения магнитной индукции в воздушном зазоре синхронной машины.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1989 |
|
SU1676053A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА В ЭЛЕКТРОПРИВОДЕ С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2013 |
|
RU2541359C1 |
| МНОГОПОЛЮСНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2597993C1 |
| Вентильный электродвигатель и способ его настройки | 1984 |
|
SU1272414A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Вентильный электродвигатель | 1980 |
|
SU964882A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652102C1 |
Использование. В системах управления вентильными электродвигателями. Сущность изобретения. Введение дополнительного блока памяти, генератора синхронизирующих импульсов позволяет формировать дополнительные сигналы, устанавливающие, где происходит сбой в системе, т. е. улучшает работу устройства, уменьшается вероятность сбоев из-за, помех в канале датчика положения ротора. 1 табл. 3 ил.
Блок
деле- ния
Модулятор
В лак Счисления (рункцЦУ- отугла подо- рота ротора
Статор
(о5моп1 ги)
Х
Фие. /
25
&
Фие 2
| Азов А.К | |||
| и др | |||
| Управление бесконтактными двигателями постоянного тока в следящих системах и пути миниатюризации усилителей-коммутаторов | |||
| Способ соединения двух двигателей постоянного тока снабженных контактными кольцами и компаудными обмотками для получения синхронного их вращения | 1918 |
|
SU982A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Овчинников И.Е | |||
| и Лебедев Н.И | |||
| Бесконтактные двигатели постоянного тока автоматических устройств | |||
| М.-Л.: Наука, 1966, с.13-14 | |||
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
