1
Изобретение относится к строительству, в частности к автоматическим устройствам, управляемым системами числового программного управления, исподьзуемым при отделке потолков, стен и пола помещений.
Целью изобретения является повышение качества отделочных работ за счет обеспечения точной ориентации рабочего органа и сокращения мертвых зон на обрабатьшаемой поверхности.
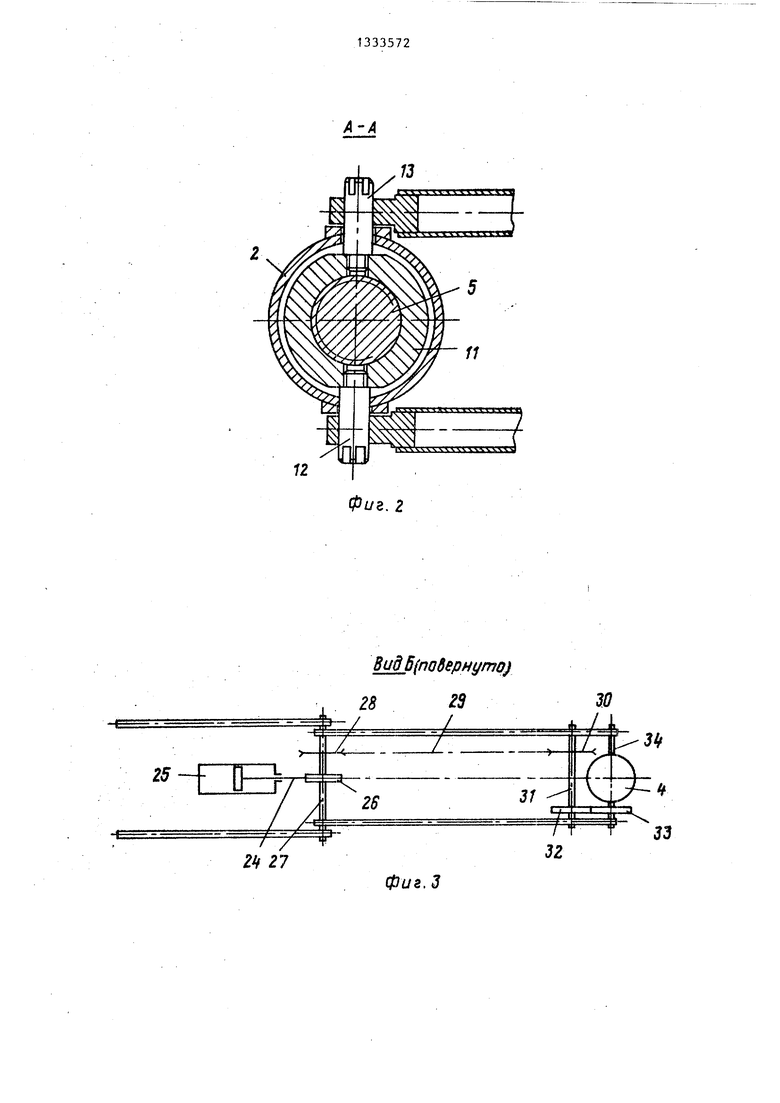
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. .3 - вид Б на фиг. 1 механизм синхронизации; на фиг. 4 - стойка, разрез; на фиг. 5 - механизм подъема и опускания манипулятора.
Манипулятор для отделки внутренних поверхностей помещений (потолко стен и пола) содержит установленную на передвижном основании 1 стойку 2 с перемещающейся по ней кареткой 3,, связанной с исполнительным механизмом, имеющим рабочий орган 4. Механизм вертикального перемещения каретки состоит из поворотного вала 5 размещенного внутри стойки 2, выполненной полой и с вертикальными пазами 6. Вал 5 выполнен резьбовым . и установлен в подшипниках 7 и 8, свободно вращающимся внутри стойки через зубчатую передачу 9 связан с приводом 10 вращения, установленным на основании 1. Кроме того, вал 5 соединен с кареткой 3 посредством перемещающейся по нему гайки 11, содиненной с направляющими 12 и 13 каретки, которые установлены в вертикальных пазах 6 стойки 2, имеющей механиз.м 14 поворота с приводом 15 вращения, установленным на основании 1.
Манипулятор снабжен механизмом подъема и опускания, выполненным в виде силовых цилиндров 16, установленных на основании 1. Причем штоки 17 силовых цилиндров выполнены в виде нижних опор, которые имеют под- пятники 18 с фиксаторами 19. Верхняя часть стойки снабжена опорой 20 с подпятником 21 и фиксатором 22.
Рабочий орган 4 крепится к каретке 3 посредством сменного поворотного рычага 23 исполнительного механизма, который одним концом шарнир- но соединен с кареткой 3 с возмож
, ,
закреп- (в зави10
15
20
25
3335722
ностью поворота в вертикальной плоскости, а на другом его конце лен сменный рабочий орган 4 симости от вида работы).
Поворотный рьтаг имеет механизм поворота, состоящий из зубчатой рейки 24, жестко соединенной со штоком силового цилиндра 25, установленного, на каретке, и шестерни 26, жестко закрепленной на оси 27 поворота рычага 23.
Для обеспечения постоянного положения рабочего органа относительно обрабатываемой поверхности имеется механизм синхронизации, состоящий, например, из цепной передачи и зубчатой цилиндрической передачи с обязательным передаточнь м числом () и с обязательным изменением угла поворота рабочего, органа на обратное относительно угла поворота рычага 23 (исполнительного механизма).
Механизм синхронизации состоит из звездочки 28, жестко посаженной на оси 27 поворота рычага 23 и соединенной цепной передачей 29 со звездочкой 30, жестко посаженной на одной оси 31 с шестерней 32, находящейся в зацеплении с шестерней 33, стоящей на одной оси 34 с рабочим органом 4. ,
Манипулятор работает следующим образом.
Устройство перемещают из одного обрабатьшаемого помещения в другое с помощью подвижного основания 1. В транспортном состоянии каретка находится в крайнем нижнем положении, а поворотный рычаг повернут (сложен) во внутрь механизма, рабочий орган снят. При этом высота стойки позволяет свободно переводить устройство через дверной проем. В помещении манипулятор устанавливают в заранее запрограммированном месте, которым может служить отверстие в потолке для вывода проводов электропроводки или технологические отверстия в полу, а при отсутствии таких отверстий - в специально размеченном месте. Закрепляется устройство посредством силовых цилиндров, которые поднимают всю конструкцию до полного упора в потолок и пол, при этом каретка 3 и поворотный рычаг 23 ориентируются в определенномнаправлении.
Рабочий орган (затирочное устройство, краскопульт и т.д.) закрепля30
35
40
45
50
55
ется на поворотный рычаг 23 в зависимости от вида обрабатьшаемой поверхности (стены, потолка, пола). Управление манипулятором осуществляется программным устройств ом по заранее составленной и заложенной в оперативное запоминающее устройство программе обработки различных поверхностей любым рабочим органом.
Оператор после подготовки манипулятора к работе в зависимости от вида работ и помещения запускает устройство управления.
Например, для нанесения краски на потоЛок к рабочему органу (краскопульту) подается под давлением рабочий материал из емкости (не показана) .
При включении устройства управле- ления (не показано) каретка 3 перемещается на необходимую и заранее установленную высоту посредством механизма вертикального перемещения каретки 3, вал 5 которого соединен с приводом 10 через зубчатую передачу 9. Поворотный рычаг 23 также разворачивается в заранее установленное положение, выставляя таким образом рабочий орган 4 в необходимое и четко сориентированное положение относително обрабатьшаемого потолка.
Затем из емкости (не показана) начинает под давлением подаваться рабочий материал (краска) в рабочий орган 4. При этом рабочий орган 4 одновременно начинает соверщать возвратно-поступательное движение в пределах ширины потолка за счет поворот стойки 2 с кареткой 3, а также продольное перемещение с заранее определенным шагом.
Обработка всей поверхности потолка осуществляется за счет перемещения каретки в вертикальном направлений и изменения угла наклона поворотного рычага.
Программное устройство (не показано) одновременно управляет приводом 10 механизма ве ртикального перемещения каретки, механизмом 14 поворота стойки 2 и силовым цилиндром 25 механизма поворота рычага 23 в вертикальной плоскости, а также механизмом синхронизации, обеспечивающим постоянство положения рабочего
обрабатываемой
0
5
0
5
0
5
0
5
0
5
органа относительно поверхности.
При переходе на обработку другой поверхности осуществляется соответствующее изменение положения рабочего органа 4 за счет включения привода шарнирного соединения 35 (не показан) .
При обработке потолка затирочным механизмом задается другая программа, так как в данном случае необходим непосредственный контакт рабочей поверхности рабочего органа с обрабатываемой поверхностью.
Формула изобретения
Манипулятор для отделочных работ в помещениях, содержащий основание с колесами, на котором установлена вертикальная стойка, каретку с направляющими и с приводом ее вертикального перемещения, а также исполнительный механизм с рабочим органом, отличающийс я тем, что, с целью повьшения качества отделочных работ за счет обеспечения точной ориентации рабочего органа и сокращения мертвых зон на обрабатываемой поверхности, он снабжен валом, расположенным посредством опор в стойке, имеющей кольцевое сечение и вертикальные сквозные пазы, а на валу вьтолнена резьба, сопряженная с резьбой дополнительно введенной гайки, жестко связанной с направляющими каретки, при этом вал кинематически связан с приводом вертикального перемещения каретки, стойка кинематически связана с индивидуальным приводом ее вращения, дополнительно установленным на основании, а последнее снабжено вертикальными силовыми цилиндрами с подпятниками и амортизаторами на концах их штоков, при этом верхняя часть стойки снабжена фиксатором ее положения, а исполнительный механизм выполнен в виде рычага, щарнирно связанного с рабочим органом и с кареткой, и снабжен индивидуальным приводом его поворота в вертикальной плоскости, установлен- ным на этой каретке, и механизмом синхронизации положения рабочего органа относительно указанного рычага.
12
2ff 27
Фиг. 2
Вид5(подерну1по)
23
/
30
3ff
X 33
32
фиа. 3
фиг.
7// /// /// /7/ ///.
Y/ //////////// ///////// /// //Y ///77/
Фиг, 5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для затирки штукатурного слоя | 1980 |
|
SU939687A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Лесохозяйственный агрегат | 1982 |
|
SU1020038A1 |
| Устройство для затирки штукатурного слоя | 1980 |
|
SU939686A1 |
| Машина для затирки штукатурного слоя | 1982 |
|
SU1070287A1 |
| Способ возведения бетонной стены, рабочий орган строительного 3d-принтера и стена бетонная | 2018 |
|
RU2704995C1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Машина для отделки поверхностей | 1977 |
|
SU734364A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Машина для отделочных работ | 1987 |
|
SU1498899A1 |


Изобретение относится к строительству и полностью позволяет автоматизировать процесс обработки (зачистку, шпаклевку и окраску) внутренних поверхностей помещений. Цель изобретения - повьшейие качества отделочных работ за счет обеспечения точной ориентации рабочего органа и сокращения мертвых зон на обра- батьшаемой поверхности. При перемещении каретки 3 с рабочим органом 4 в вертикальном направлении, осуществляемом механизмом, состоящим из поворотного вала, установленного внутри полой стойки 2, имеющей паз 6, в котором установлена каретка 3 с возможностью одновременного поворота стойки 2 с кареткой 3, происходит обработка вертикальных плоскостей помещений и горизонтальных поверхностей при одновременной работе этого механизма и механизма синхронизации положения рычага 23 и рабочего органа 4. Управление манипулятором осуществляется программным устройством по заранее составленной программе обработки различных поверхностей любым рабочим органом 4. 5 ил. (Л с Ф(/8.;
Составитель С.Новик Редактор Л.Повхан Техред И.ПоповичКорректор М.Шароши
Заказ 3913/17
Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Машина для отделки поверхностей | 1977 |
|
SU734364A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
