1
Изобретение относится к области пакетирования и штабелирования грузов для пакетных перевозок, точнее к технике автоматической укладки на стандартные поддоны штучных грузов, нреимущественно мешков, заполненных сыпучими продуктами.
Для укладки мешков на поддоны в СССР и за рубежом создан целый ряд пакетоформиРУЮШ.ИХ машин, которые при помощи различных механизмов подачи и ориентации укладывают мешки на поддоны в многослойные пакеты с различной перевязкой 1.
Пакетоформирующие машины обладают следующими недостатками: громоздкость и наличие больших ударных нагрузок на мешок. В ряде случаев это приводит к разрыву мешков п процессе штабелирования.
Известен принципиально новый класс машин- манипуляторов, применяемых для выполнения самых различных технологических, транспортных, а также упаковочных операций, в частности, операции штабелирования. Манипулятор не имеет недостатков, присущих пакетоформирующим машинам, но система его управления сложнее. Одной из причин этого является нрименение щагового электродвигателя 2. В случае использования манипулятора как щтабелеукладчика применение щагового электродвигателя экономически неОправдано, так как высокая точность исполнения команд не требуется.
Наиболее близким прототипом является манипулятор, содержа1ций корпус с вертикальной осью, на которой подвижно закреплены две руки, связанные с механизмами их поворота и несущие исполнительные органы, связанные с механизмами их вертикального перемещения 3. Однако этот манипулятор не может работать в режиме щтабелеукладчика.
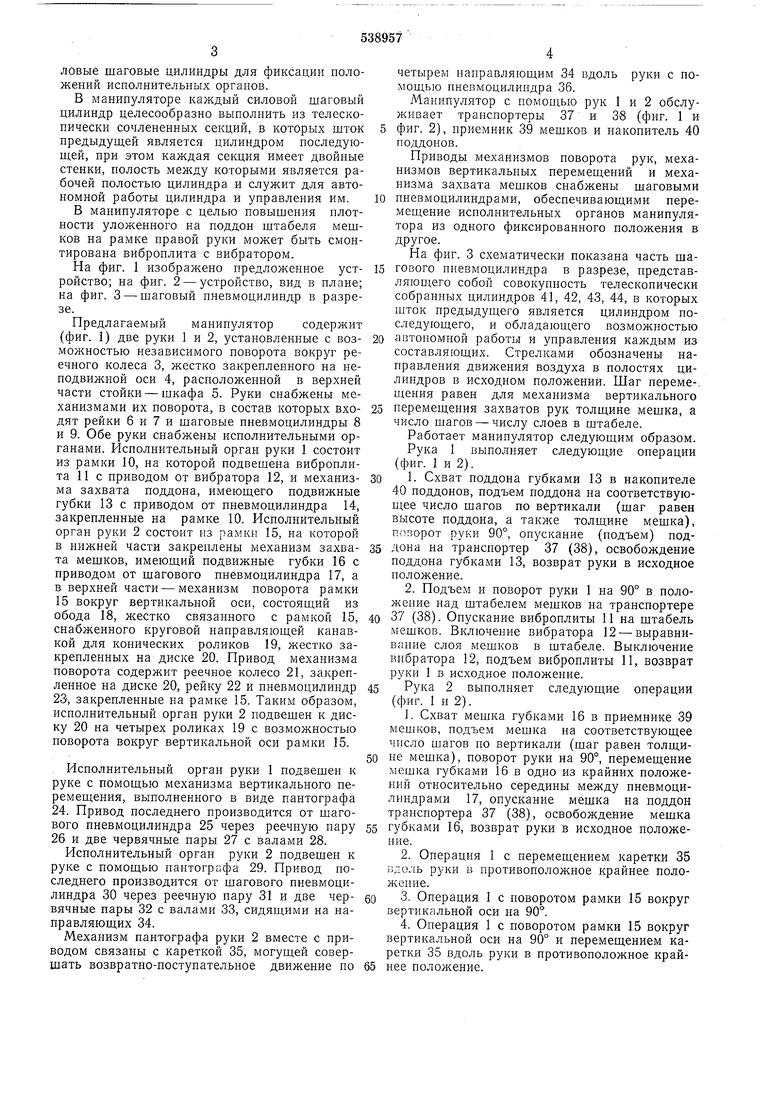
Цель изобретения - расщирение технологических возможностей манипулятора, укладка и разборка щтабелей грузов, например, мешков, на поддон и с поддона. Эта цель достигается тем, что исполнительный орган первой руки содержит рамку с механизмом захвата поддонов, имеющим поджимные губки, а исполнительный орган второй руки содержит поворотную в горизонтальной плоскости рамку с механизмом захвата грузов, также имеющим поджимные губки, причем механизм вертикального перемещения исполнительного органа второй руки связан с ней посредством тележки, подвижно установленной в смонтированных на руке продольных направляющих, при этом механизмы поворота рук, механизмы захвата и механизмы вертикального перемещения исполнительных органов содержат силовые шаговые цилиндры для фиксации положений исполнительных органов. В манипуляторе каждый силовой шаговый цилиндр целесообразно выполнить из телескопически сочлененных секций, в которых шток5 предыдущей является цилиндром последующей, при этом каждая секция имеет двойпые стенки, полость между которыми является рабочей полостью цилиндра и служит для автономной работы цилиндра и управления им. В манипуляторе с целью повышения плотности уложенного на поддон штабеля мешков на рамке правой руки может быть смонтирована виброплита с вибратором. На фиг. 1 изображено предложенное уст- 15 ройство; на фиг. 2 - устройство, вид в плане; на фиг. 3 - шаговый пневмоцилиндр в разрезе. Предлагаемый манипулятор содержит (фиг. 1) две руки 1 и 2, установленные с воз- 20 можностью независимого поворота вокруг реечиого колеса 3, жестко закрепленного на неподвижной оси 4, расположенной в верхней части стойки - шкафа 5. Руки снабжены механизмами их поворота, в состав которых вхо- 25 дят рейки 6 и 7 и шаговые пневмоцилиндры 8 и 9. Обе руки снабжены исполнительными органами. Исполнительный орган руки 1 состоит из рамки 10, на которой подвешена виброплита И с приводом от вибратора 12, и механиз- 30 ма захвата поддона, имеющего подвижные губки 13 с приводом от пневмоцилиндра 14, закрепленные на рамке 10. Исполнительный орган руки 2 состоит из рамки 15, на которой в нижней части закреплены механизм захва- 33 та мешков, имеющий подвижные губки 16 с приводом от шагового пневмоцилиндра 17, а в верхней части - механизм поворота рамки 15 вокруг вертикальной оси, состоящий из обода 18, жестко связанного с рамкой 15, 40 снабженного круговой направляющей канавкой для конических роликов 19, жестко закрепленных на диске 20. Привод механизма поворота содержит реечное колесо 21, закрепленное на диске 20, рейку 22 и пневмоцилиндр 45 23, закрепленные на рамке 15. Таким образом, исполнительный орган руки 2 подвещен к диску 20 на четырех роликах 19 с возможностью поворота вокруг вертикальной оси рамки 15. Исполнительный орган руки I подвешен к руке с помощью механизма вертикального перемещения, выполненного в виде пантографа 24. Привод последнего производится от шагового пневмоцилиндра 25 через реечную пару55 26 и две червячные пары 27 с валами 28. Исполнительный орган руки 2 подвещен к руке с помощью пантографа 29. Привод последнего производится от шагового пневмоцилиндра 30 через реечную пару 31 и две чер-gO вячные пары 32 с валами 33, сидящими на нанравляющих 34. Механизм пантографа руки 2 вместе с приводом связаны с кареткой 35, могущей совершать возвратно-поступательное движение ио65 10 50 четырем нацравляющим 34 вдоль руки с помощью пневмоцилиндра 36. Манипулятор с помощью рук 1 и 2 обслуживает транспортеры 37 и Зв (фиг. 1 и фиг. 2), приемник 39 мешков и накопитель 40 поддонов. Приводы механизмов поворота рук, механизмов вертикальных перемещений и механизма захвата мешков снабжены шаговыми пневмоцилиндрами, обеспечивающими перемещение исполнительных органов манипулятора из одного фиксированного положения в другое. На фиг. 3 схематически показана часть шагового нневмоцилиндра в разрезе, представляющего собой совокупность телескопически собранных цилиндров 41, 42, 43, 44, в которых шток предыдущего является цилиндром последующего, и обладающего возможностью автономной работы и управления каждым из составляющих. Стрелками обозначены направления движения воздуха в полостях цилиндров в исходном положении. Шаг переме-. прения равен для механизма вертикального перемещения захватов рук толщине мешка, а число шагов - числу слоев в штабеле. Работает манипулятор следующим образом. Рука 1 выполняет следующие операции (фиг. 1 и 2). 1. Схват поддона губками 13 в накопителе 40 поддонов, подъем поддона на соответствующее число шагов по вертикали (шаг равен высоте поддона, а также толщине мешка), поворот руки 90°, опускание (подъем) подлона на транспортер 37 (38), освобождение поддона губками 13, возврат руки в исходное положение. 2. Подъем и поворот руки 1 на 90° в положение над штабелем мешков на транспортере 37 (38). Опускание виброплиты 11 на штабель мешков. Включение вибратора 12 - выравниванне слоя мешков в штабеле. Выключение вибратора 12, подъем вибронлиты 11, возврат руки 1 в исходное положение. Рука 2 выполняет следующие операции (фиг. 1 и 2). 1. Схват мещка губками 16 в приемнике 39 мешков, подъем мешка на соответствующее число шагов по вертикали (щаг равен толщине мещка), поворот руки на 90°, перемещение мешка губками 16 в одно из крайних положений относительно середины между пневмоцилиндрами 17, опускание мешка на поддон транспортера 37 (38), освобождение мещка губками 16, возврат руки в исходное положение. 2. Операция 1 с перемещением каретки 35 вдоль руки в противоположное крайнее положение. 3. Операция 1 с поворотом рамки 15 вокруг вертикальной оси на 90°. 4. Операция 1 с поворотом рамки 15 вокруг вертикальной оси на 90° и перемещением каретки 35 вдоль руки в противоположное крайнее положение.
Всего обе руки выполняют по 6 типов операций на каждый транспортер. Очередность и частота этих операций обеспечивается заданной программой. После того, как штабель на поддоне готов, последний отводится из рабочей зоны транспортерами 37 и 38, затем цикл повторяется.
Предлагаемое устройство имеет по сравнению с пакетоформирующей машиной следующие цреимущества: небольшие габариты и вес; занимаемая площадь ориентировочно меньше в полтора-два раза, а вес в пять раз; отсутствие ударных нагрузок на мешок.
Последнее обстоятельство позволяет получить производительность штабелирования выше, чем в пакетоформирующей машине.
Предложенный манипулятор-штабелеукладчик по сравнению с прототипом имеет следующие преимущества: упрощение системы управления вертикальным перемещением путем замены шагового электродвигателя, применяемого обычно в подобных устройствах, шаговым пневмоцилиндром, шаг перемещения захвата при котором равен толщине мешка, а количество шагов пневмоцилиндра равно числу слоев в штабеле, при этом уменьшается количество команд, так как изменение скорости подъема (опускания) по мере изменения высоты штабеля обеспечивается самой конструкцией шагового пневмоцилиндра, в котором время подъема (опускания) захвата руки не зависит от высоты штабеля и равно времени подъема (опускания) на один шаг. Размещение шагового пневмоцилиндра в корпусе руки при этом облегчает (по весу) захваты рук, что приводит к уменьшению затрат энергии на перемещение носледних; упрощение конструкции путем обеспечения с помощью шаговых пневмоцилиндров возможности фиксации мешка в трех позициях, учитывая и схват мешка, без дополнительного механизма; упрощение конструкции путем обеспечения с помоп1ью щагового пневмоцилиндра возможности остановки каждой руки в трех позициях без дополнительных механизмов; повышение прочности штабеля мешков на поддоне путем виброуплотнения каждого слоя мешков с помошью виброплиты, „совмещенной с механизмом захвата поддонов.
6 Формула изобретения
1. Манипулятор, содержащий корпус с вертикальной осью, на которой подвижно закреплены две руки, связанные с механизмами их поворота и несуп ие исполнительные органы, связанные с механизмами их вертикального перемещения, отличающийся тем, что, с целью расширения технологических возможностей и укладки и разборки штабелей грузов, например, мешков на поддон и с поддона, исполнительный орган первой руки содержит рамку с механизмом захвата поддонов, имеющим поджимные губки, а исполнительный орган второй руки содержит поворотную в горизонтальной плоскости рамку с механизмом захвата груза, также имеющим поджимные губки, причем механизм вертикального перемещения исполнительного органа второй руки связан с ней посредством тележки, подвижно установленной в смонтированных на руке продольных направляющих, при этом механизмы поворота рук, механизмы захвата и механизмы вертикального перемещения исполиительных органов содержат силовые щагоБые цилиндры для фиксации положений исполнительных органов.
2.Манипулятор по п. 1, отличающийся тем, что каждый силовой цилиндр выполнен из телескопически сочлененных секций, в которых шток предыдущей является цилиндром последующей, при этом каждая секция имеет двойные стенки, полость между которыми является рабочей полостью цилиндра и служит для автономной работы цилиндра и управления им.
3.Манипулятор по пп. 1 и 2, отличающ и и с я тем, что, с целью повышения плотности уложенного на поддоне штабеля мешков, на рамке первой руки слюнтирована виброплита с вибратором.
Источники информации, принятые во внимание при экспертизе:
1.«Пакетоформируюшие машины, Информтяжмаш 6-68-43, М., 1968.
2.Патент США N 3739923, М. Кл. В 25J 9/00, 1972.
3.Авт. св. № 453292, М. Кл. В 25J 5/02, 1972 (прототип).
J(
л
1| . -f
П1
tvv
-ЕЫ
it
a

| название | год | авторы | номер документа |
|---|---|---|---|
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1967 |
|
SU194000A1 |
| УСТАНОВКА ДЛЯ ПАКЕТИРОВАНИЯ ШТУЧНЫХ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО КИРПИЧЕЙ | 2006 |
|
RU2334670C2 |
| Передвижная машина для погрузки штучных грузов | 1959 |
|
SU128128A1 |
| Устройство для ориентирования изделий | 1982 |
|
SU1121207A1 |
| Машина для формирования из стандартных грузов, например мешков, пакетов-штабелей | 1957 |
|
SU116824A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Пакетоформирующая машина | 1981 |
|
SU1020330A1 |
| УСТРОЙСТВО ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2448029C1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |



