11333575
Изобретение относится к захватным
устройствам опорно-зажимного типа для захвата изделий с отверстиями (например, блоков цилиндров двигате- лей внутреннего сгорания и др.) и может быть использовано в машиностроительных предприятиях для захвата изделий с отверстиями, поворота их в нужное положение и удержания при выполнении различных операгдий над ними, требующих силового воздействия на изделия (механическая обработка, закалка и мойка в жидкости, покраска транспортировка с большой скоростью и др.).
Цель изобретения - повышение надежности за счет самозаклинивания захватных элементов.
На фиг.1 приведено устройство, общий ВИД; на фиг.2 - то же,при установке или снятии изделия; на фиг.З - конструкция с гибкими элементами; на фиг.4 - устройство с двумя захватными органами.
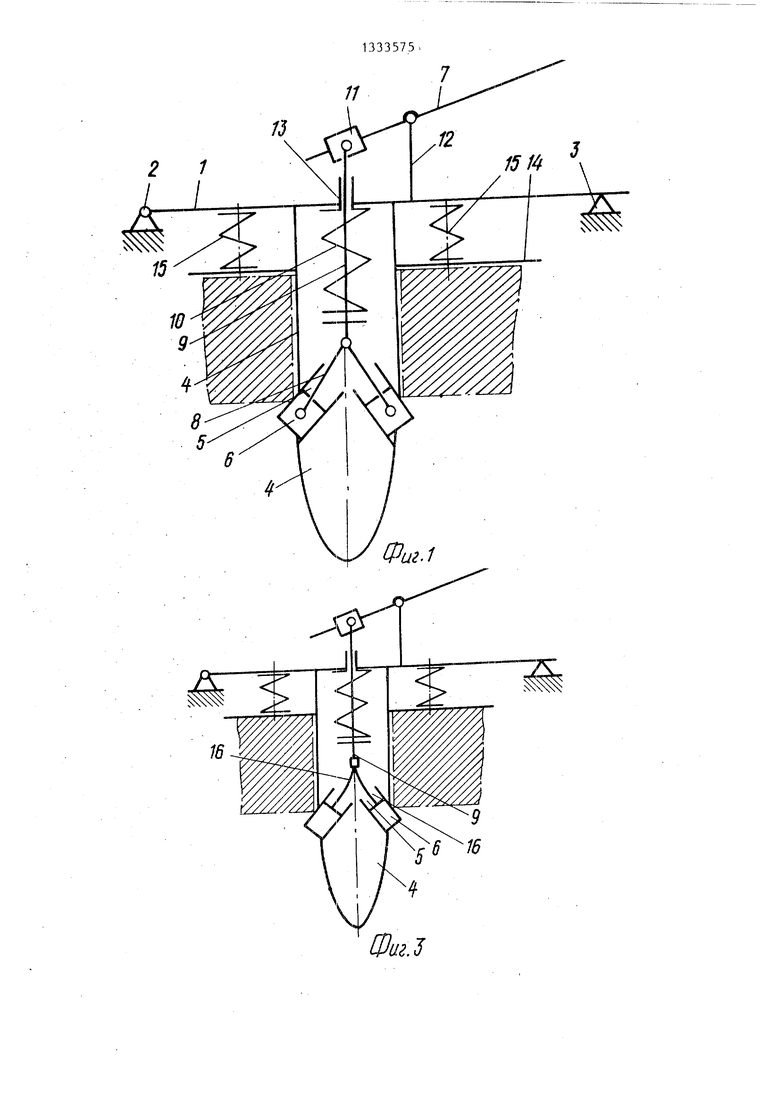
Захватное устройство содержит основание - поворотную платформу 1, шарнирно установленную на опоре 2. Свободным концом поворотная платфор1 опирается на упор 3. На платфор- 30 изделие на опорный элемент 14. Прума
ме 1 жестко закреплен корпус 4 с наклонными пазами 5, в которых подвижно размещены захватные элементы 6, щар- нирно соединенные с кулисой 7 посредством рычагов 8, ползуна 9 с пружиной 35 10 и шатуном 11. Кулиса 7 щарнирно опирается на стержень 12, жестко закрепленный на поворотной платформе. Последняя снабжена подшипником 13 скольжения, по которому перемещается 40 ползун 9. Кроме того, на поворотную платформу 1 установлен опорньй элемент 14 посредством амортизирующих пружин 15. Захватные элементы 6 могут быть жестко соединены с ползуном 9 45 посредством тяг, выполненных в виде плоских пружин 16 (фиг.З).
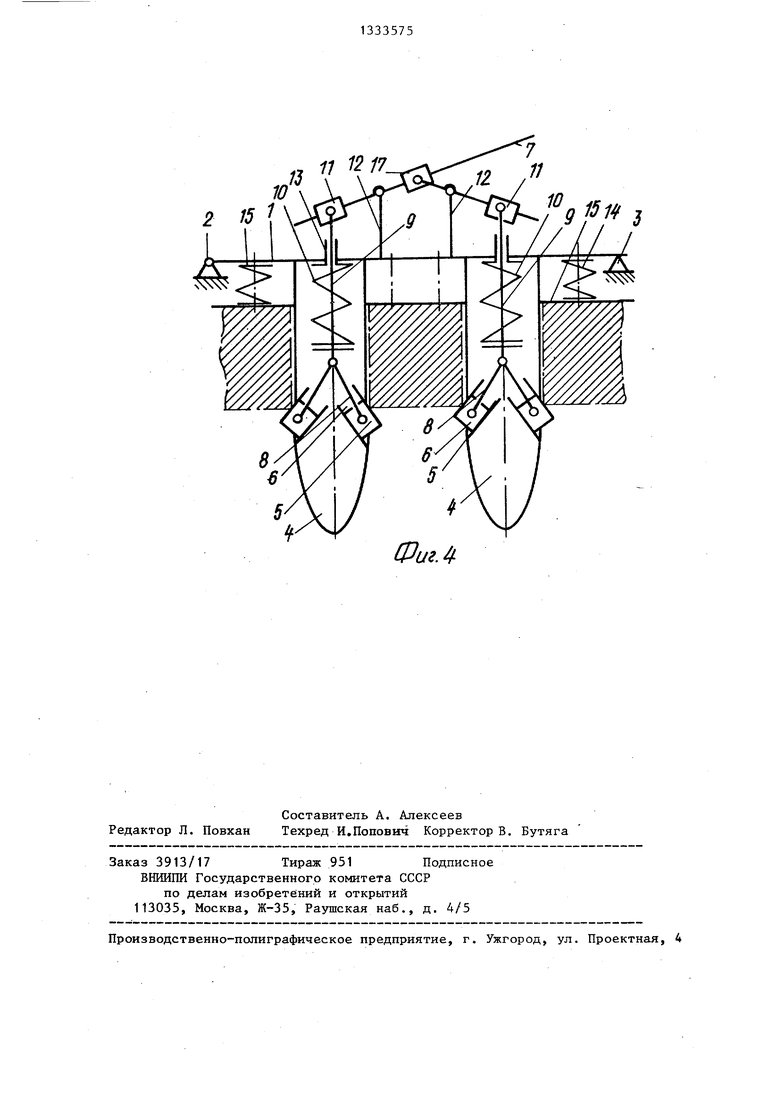
Для захвата габаритных (длинных) изделий поворотная платформа может QQ быть снабжена вторым захватным органом, вьшолненным аналогично первому и связанным с кулисой 7 первого захвата посредством ползуна 17. Кроме
жины 15 в этом положении сжимаются под действием силы тяжести изделия и могут амортизировать удары при установке.
После этого включается источник
привода поворотной платформы 1 и она начинает поворачиваться в исходное положение (фиг.1) вокруг оси опоры 2, освобождая поворотную платформу 1 и кулису 7 от воздействия упоров 18 и 19 соответственно. В это время пружина 10 разжимается и опускает (фиг.1) ползун 9., который перемещает в свою очередь захватные элементы 6 по пазам 5 также вниз. Захватные элементы 6 выступают за цилиндрическую поверхность корпуса 4. Выступаю- пще части захватных элементов 6 становятся больше размера (диаметра) отверстия изделия. Когда поворотная платформа 1, поворачиваясь вокруг опоры 2, опирается на упор 3, издели с отверстием под действием собственной силы тяжести начинает сползать
того, устройство имеет упоры 18 и 19, gg по корпусу 4. Захватные элементы 6,
на которые опирается кулиса 7 и поворотная платформа 1 соответственно в положении для установки и снятия захватываемого изделия.
выступающие за цилиндрическую поверх ность корпуса, воспрепятствуют этому. Так как размеры выступающих частей захватных элементов 6 больше
2
Устройство работает следующим образом.
Основание поворотную платформу 1 (фиг.1) посредством источника привода (не показан), вращая вокруг горизонтальной оси опоры 2, приводят в положение для установки на нее захватываемого изделия (фиг.2). В этом положении кулиса 7 упирается на упор 18, поворачивается вокруг шарнира стержня 12 и посредством шатуна 11 тянет ползун 9 вниз по подшипнику 13 скольжения, преодолевая силу сопротивления пружины 10. При этом ползун 9 посредством рычагов 8 передвигает захватные элементы 6 до их полного утопления в пазах 5 корпуса 4. После этого noBori, ротная платформа 1 окончательно опирается на упор 19 и источник привода отключается.
Далее изделие с отверстиями при помощи грузоподъемного устройства устанавливается на подставку так, чтобы корпус 4 вошел в отверстие изделия. Конусообразный конец корпуса и утопленные в паза.х 5 захватные |элементы 6 позволяют легко установит
жины 15 в этом положении сжимаются под действием силы тяжести изделия и могут амортизировать удары при установке.
После этого включается источник
привода поворотной платформы 1 и она начинает поворачиваться в исходное положение (фиг.1) вокруг оси опоры 2, освобождая поворотную платформу 1 и кулису 7 от воздействия упоров 18 и 19 соответственно. В это время пружина 10 разжимается и опускает (фиг.1) ползун 9., который перемещает в свою очередь захватные элементы 6 по пазам 5 также вниз. Захватные элементы 6 выступают за цилиндрическую поверхность корпуса 4. Выступаю- пще части захватных элементов 6 становятся больше размера (диаметра) отверстия изделия. Когда поворотная платформа 1, поворачиваясь вокруг опоры 2, опирается на упор 3, издели с отверстием под действием собственной силы тяжести начинает сползать
выступающие за цилиндрическую поверхность корпуса, воспрепятствуют этому. Так как размеры выступающих частей захватных элементов 6 больше
размера (диаметра) отверстия изделия оно опирается на эти элементы. Под воздействием силы тяжести изделия захватные элементы 6 стремятся сползти вниз по пазам 5. Поскольку пазы 5, в которых расположены захватные элементы 6, выполнены наклонными, элементы чем больше сползают вниз, тем надежнее захватывают изделие. Кроме того, опорный .элемент 14 посредством сжатых пружин 15 прижимает изделие к захватным элементам. Таким образом, изделие жестко, надежно и безопасно захватывается, над ним мож но. выполнять операции, требующие силового воздействия (механическая обработка, закалка и мойка в жидкости, покраска, транспортировка с большой скоростью и др.).
После этого поворотную платформу 1 (фиг.1) посредством источника привода, вращая вокруг горизонтальной оси опоры 2, приводят в положение дл снятия захваченного изделия (фиг.2). В этом положении кулиса 7, опираясь на упор 18, поворачивается вокруг шарнира стержня 12 и посредством шатуна 11 тянет ползун 9 вниз по под- шипнику 13 скольжения, преодолевая силу сопротивления пружины 10. При этом ползун 9.через рычаги передвигает захватные элементы 6 до их полног утапливания в пазах 5 корпуса 4. Изделие в этом положении опирается под действием своей силы тяжести на опорный элемент 14, сжимает пружины и тем самым несколько опускается, освобождая захватные элементы 6. Далее поворотная платформа 1 окончательно опирается на упор 19 и источник привода отключается.
Для упрощения конструкции связь ползуна 9 с захватными элементами 6 . может быть выполнена в виде плоских пружин 16 (фиг.3). Принцип работы данного устройства аналогичен выше описанному.
Для захвата габаритных (длинных) изделий, для увеличения жесткости захвата их и повьштения надежности захвата поворотная платформа 1 может быть снабжена вторым захватным органом, выполненным аналогично первому и связанным с кулисой 7 первого за
0
5
5
хвата посредством ползуна 17 (фиг.4), принцип работы этого захвата (фиг.4) аналогичен первому, только перемещение захватных элементов 6 второго захватного органа через рычаги 8, ползун 9 с пружиной 10 осуществляется кулисой 7 посредством ползуна 17. Таким образом, в предлагаемом устройстве параллельно работают два.захватных органа, что увеличивает жесткость и надежность захвата габаритных (длинных) изделий с двумя отверстиями.
Формула изобретения
1.Захватное устройство, содержащее основание, на котором установлен корпус захватного органа, включающего захватные элементы, и подпружиненный опорный элемент, расположенный между основанием и захватными элементами, отличающееся тем, что,
с целью повышения надежности работы, захватный орган снабжен кулисно-пол- зунным механизмом, ползун которого подпружинен относительно корпуса и кинематически связан с захватными 0 элементами, размещенными в направляющих пазах корпуса, при этом кулиса установлена на основании и предназначена для взаимодействия с дополнительно введенным упором.
2.Устройство ПОП.1, отличающееся тем, что кинематическая связь ползуна с захватными элементами вьтолнена в виде рычагов, каждый из KO t opbDc установлен посредством шарниров на ползуне и захватном элементе.
3.Устройство ПОП.1, отличающееся тем, что кинематическая связь ползуна с захватными элементами выполнена в виде упругих элементов, закрепленных одним концом на ползуне, а другим - на захватном элементе.
4.Устройство по П.1, отличающееся тем, что оно снабжено вторым захватным органом, установленным на основании, и дополнительным кулисным механизмом, звеньями которого являются кулисы кулисно-т ползунных механизмов захватных органов.
6
0
5
O
//
10
/J
n 1217.
2 15
Фиг Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочный ротор | 1989 |
|
SU1705010A1 |
| Установка для термомеханического упрочнения изделий | 1990 |
|
SU1740454A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ | 1989 |
|
SU1676194A1 |
| Сшивающий аппарат для соединения многолистовых типографских изделий | 1990 |
|
SU1834816A3 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Устройство для завертывания прямоугольных предметов | 1976 |
|
SU644669A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Аппарат для просмотра фотоснимков | 1980 |
|
SU988199A3 |
| Станок для изготовления змеевиков | 1981 |
|
SU967612A1 |
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1988 |
|
SU1551455A1 |
Изобретение относится к машиностроению, в частности к устройствам для захвата изделий с отверстием и удержания при вьшолнении различных 19 операций. Целью изобретения является повьшение надежности работы за счет самозаклинивания захватных элементов. При захвате кулиса 7 опирается на упор 18, тянет ползун 9, который посредством рычагов 8 перемещает захватные элементы 6 по пазам 5, утапливая их в корпусе 4. Изделие опускается на опорный элемент 14, корпус 4 размещается в отверстии изделия. Основание - платформа 1 поворачивается вокруг оси, освобождая кулису 7 от воздействия упора 18. Ползун 9 под действием пружины Ю перемещается вниз, вьщвигая захватные элементы 6, которые препятствуют снятию изделия с корпуса 4. 3 з.п, ф-лы, 4 ил. (Л с 00 00 00 01 ел фи&. 2
Редактор Л. Повхан
Составитель А. Алексеев
Техред И.Попович Корректор В. Бутяга
Заказ 3913/17 Тираж 951 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Захват механической руки для пере-МЕщЕНия пОлыХ КОРпуСНыХ издЕлий | 1979 |
|
SU812570A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
