I
Изобретение относится к подьегишотранспортному оборудованию, в частнорт к устройствам для захвата и перемещешш изделий.
Известен захват, содержаошй корпус, поворотные захватные рычаги, контактирующие с подвижным приводным элементом, имеющим фигурные рабочие поверхшхггя, а также элементы фиксации захватных рычагов в рабочем и нерабочем положении flilНедостатком известного устройства является то, что изделие не освобождается от захвата мгновенно при его опу- скашш на опору.
Цель изобретения - повышение производительности и расш1феш1е технологических возможностей.
Для достижения поставленной цели захват снабжен жестко соединенной с корпусом тягой, жестко соединенным с приводным элементом подпружиненным ползуном, имеющим упоры, размеры котбрых выходят за габарит корпуса, кониевым упором и механизмом сброса изделия, выполненным в виде Г-образного двуплечего рычага, установленного на корпусе с возможностью взаимодействия с ползуном и с концевыми упорами, 1фнчем корпус подщэужинен относительно механической руки. .
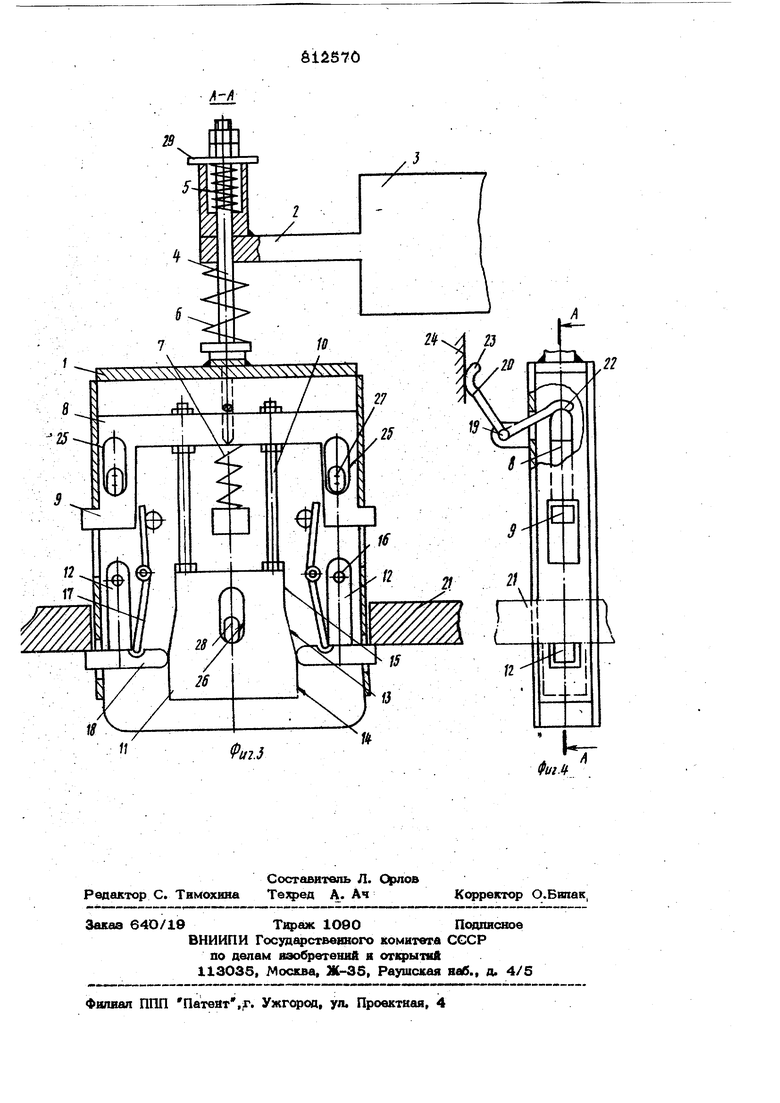
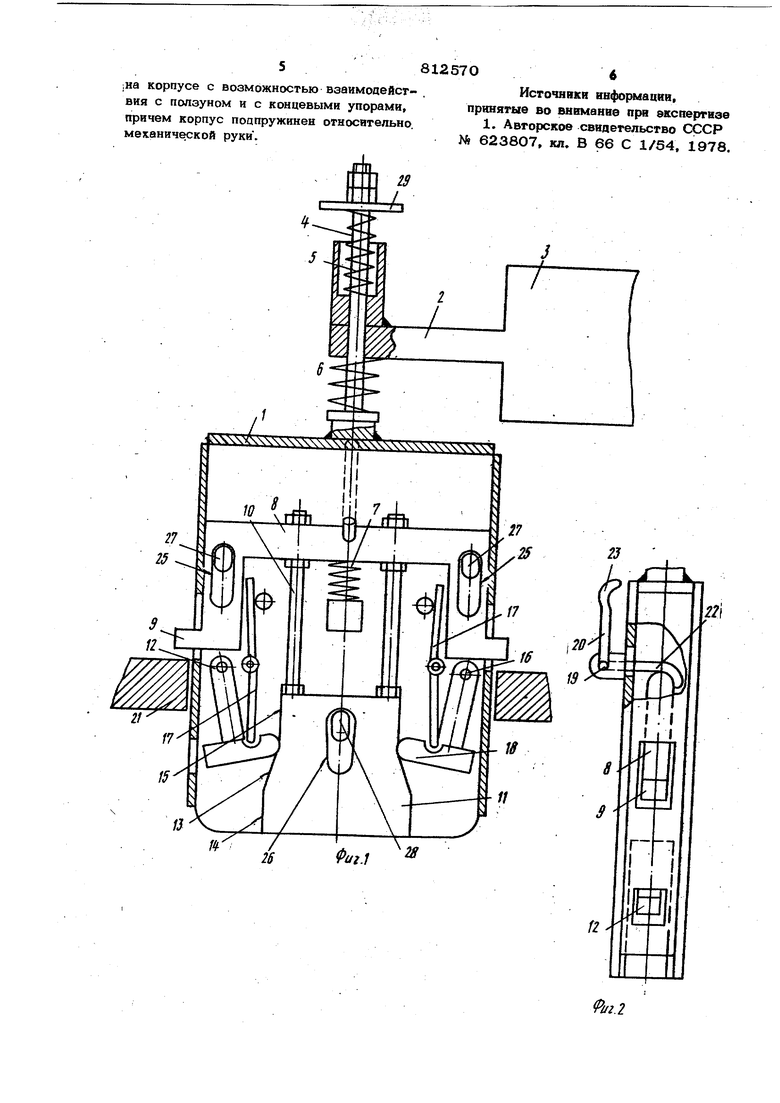
На фиг. 1 схематически изображен захватв исходном псложениа вт спереди, на фиг. 2 - то же, вид , на фиг. 3, 4 - захват в рабочем положении.
Захват содержит корпус 1, подвижно подвешенный на консоли 2 механической руки 3 посредством тяги 4, жестко прикрепленной к корпусу и подпружинед ной пружинами 5 и 6.
В корпус 1 вмонтщюван подфуживенн ный гфужиной 7 ползун. 8 с упорами- 9, жестко соединенный посредством Ъг жней io с подвижным приводным эпементом 11 захватных Г-офазных рычагов 12, имеюишм рабочие наклонные поверхности 13 и прямые вертикальные участки 14 и 15. Рычаги 12 закреплены в корпусе 1 под ползуном 8 шарнирно на осях 16, подпружинены пружинами 17 к оси аахва та и постоянно контактируют своими выату па ми 18 с рабочими поверхностями 13, 14, 15 элемента привода 11. На корпусе 1 смонтгфован на оси 19 Г-образный двуплечий рычаг 2О сброса изделия 21, сопряженный одним сво-f им плечом 22 с ползуном 8 элемента привода 11 захватных рычагов 1.2, а другим плечом 23 - с концевым упором 24 механической руки С .-ломент сброса изделия 21 с захвата в ее рабочего хода). Захват работает следующим образом. При опускании захвата полость изделия, 21, упоры 9 ползуна 8 упираются в верхний торец изделия 21, а корпус 1захвата продолжает опускаться вниз, т.е. ползун 8 и фигурный приводной элемент 11, оставаясь на месте, движутся как бы вверх относительно корпуса 1 захвата в своих направляющих 25 и 26, в которых смонтированы ясестко закрепленные на корпусе 1 сухари 27 и 28, ограничивающие движение ползуна 8 и фигурного элемента привода 11 вверх и вниз. Пружина 6, сжимаемая консолью 2механической рукой 3, передает дав-, ление вниз на корпус 1 захвата, ежи- ; мается соответственно толщине стбнки изделия, а пружина 7 разжимается и предотвращает падение ползуна 8 и элемента привода 11 в момент, когда упор 9 отрываются от верхнего торца изделия при последующей транспортировке его. Захватные рычаги 12, закрепленные на корпусе 1, продолжают опускаться вместе с ним и, взаимодействуя своими выступами 18 с рабочими на-клошыми поверхностями 13 и 14 фигур ного элемента привода 11, выжимаются ими за габарит корпуса 1 захвата, посл чего -ОНИ готовы к захвату изделия 21 за его нижний торец. Для захвата изделия 21 корпус 1 захвата поднимается консолью 2 механической руки 3, посредством тягн 4 и шайбы 29 на ней 5 сжимается. а захватные рычаги 12 захватывают изд лие 21. При подъеме изделия 21, захваченного рычагами 12 механической руки 3 корпус 1 захвата движется вверх, а пружина 7 Щ)И этом постоянно поджимае вверх ползун 8 и жестко связанный с ним фигурный приводной элемент 11 и не позволяет опуститься вниз и осво- O4 боднться захвату от изделия во время его транспортировки. Пружина 17 во время транспортировки изделия поджимает поворотные захватные рычаги 12 к вертикальным поверхностям 14 фигурного 1ФИВОДНОГО элемента 11, также препятствует (за счет сил трения) опусканию элемента 11 и возвращению рычагов 12 в корпус захвата, т. е. в нерабочее положение. Во время работы элементов захвата ползун 8, поднимаясь вверх относительно корпуса 1, поворачивает контактирующий с ним плечом 22 двуплечий рычаг 20 сброса изделия 21 (фиг. 2,4) так, 4fo второе его плечо 23 становится в наклонное положение. При повороте механической руки 3 с захватом и изделием 21 для.переноса его на другую позицию в конце ее хода рычаг 2О взаимодействует своим плечом 23 .с концевым упором 24 механической руки 3 и возвращается в исходное положение (фиг. 2). Рычаг 2О, поворачиваясь, давит вниз плечом 22 на ползун 8 и фигурный элемент привода 11, вследствие чего они опускаются внид относительно корпуса 1 захвата. Фигурный приводной элемент 11, контактируя с захватными рычагами 12 своими рабочими поверхностями 13, позволяет повернуться под воздействием пружин 17 захватным рычагам 12 тоже в исходное положение (фиг. 1). При этом происходит сброс изделия 21 с захвата. Захват готов вновь к захвату изделия. Формула изобретения Захват механической руки цля перемещения полых корпусных изделий, содержащий корпус, захватные рычаги, контактирующие с подвижным приводным элементом, имеющим фигурные рабочие поверхности, а также элементы фиксации захватных рычагов в рабочем и нерабочем положении, отличающийся тем, что, с целью повышения производи- тельности и расширения технологических возможностей, он снабжен жестко соединенной с корпусом тягой, жестко соединенным с приводным элементом подпружиненным ползуном, имеющим упоры, размеры которых выходят за габарит корпуса, концевым упором и механизмом сброса изделия, выполненным в виде Г-образ JHoro двуплечего рычага, установленного
581257О6
.на корпусе с возможностью взаимодейст- ,Источники информации,
ВИЯ с ползуном и с концевыми упорами,принятые во внимание при акспертиэе
причем корпус подпружинен относительно.1. Авторское свидетельство СССР
механической руки .№ 623807, кл. В 66 С 1/54, 1978.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для подачи плоских заготовок в обрабатывающую машину | 1988 |
|
SU1539082A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для разбора пакета длинномерных изделий и поштучной их выдачи | 1985 |
|
SU1386537A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| Роторно-конвейерная линия | 1987 |
|
SU1706837A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Устройство для разборки полых цилиндрических изделий | 1990 |
|
SU1794835A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |