Изобретение относится к текстильной промьппленности, к оборудованию для переработки хлопка-сырца, например наличным джинам, линтерам.
Целью изобретения является расширение технологических возможностей . путем обеспечения контроля состояния сменных рабочих органов.
На чертеже изображена структурная схема устройства, реализующего способ.
Устройство дпя осуще ствления предлагаемого способа контроля работы хлопкоперерабатывающей машины содержит датчик 1 нагрузки на привод рабочих органов хлопкоперерабатывающей машины, выключатель 2, вход которо- го соединен с выходом сумматора 3, задатчик 4 ресурса работы сменных рабочих органов.машины, соединенный с Первым входом сумматора 3, индикатор 5, датчик 6 частоты вращения питающих валиков, делитель 7, блок 8 задержки времени. Нуль-орган 9 и блок 10 памяти, связанный своим выходом с индикатором 5, а входом - с выходом выключателя 2, управляющий вход которого соединен с выходом нуль-органа 9, первый вход нуль-органа 9 соединен с выходом делителя 1 а второй - с тем же выходом, но через блок 8 задержки времени, кроме того, выход делителя 7 соединен с вторым входом сумматора 3, а входы соответственно с датчиком 1 нагрузки на привод машины и с датчиком 6 Частоты вращения питающих валиков.
Способ контроля работы хлопкоперерабатывающей машины осуществляется следующим образом.
Все основные машины по переработке хлопка (очистка, джинирование, линтерование и волокноочистка) осуществляют механические, разделительные процессы и имеют достаточно часто сменяемые рабочие органы (в джинах и линтерах, например, используется пакет пил пильных цилиндров). Частота смены рабочих органов зависит от типа машины и сорта перерабатываемого хлопкового материала. При этом, если рабочие органы менять раньше их допустимого износа, то скорость переработки и качество продукции повысится но зато увеличатся простои оборудования из-за увеличения числа непроизводительных операций по замене органов и переналадке машины, а также увеличится расход материалов, используемых на изготовление или ремонт сменных рабочих органов. При смене рабочих органов позже допустимого их износа уменьшается скорость переработки и снижается качество выходного материала. Таким образом, эффективность работы хлопкоперера()атывающей машины и качество выходно о материала зависят от контроля состояния сменных рабочих органов машины и своевременного выявления Износа их
5 до состояния допустимого Для данного процесса, переработки и сорта перерабатываемого хлопкового материала.
1ИХ органов, эчих поверх- непосредственно с поступающим в переработку хлопком, тесно связано с хачеством и количеством получаемой :з результате этого хлопковой продукции.
5 Следовательно, если хлопкоперера- батывающую машину представить как динамическое звено, то состояние смен- . ных рабочих органов может быть представлено как передаточная функция
0 этого звена. Причем значе: ие этой функции дрейфует во време: и в соответствии с процессом износа рабочих органовi Передаточная выража-
Состояние сменных рабо
а точнее состояние их раб(
0 ностей, взаимодействующих
ется отношением выходного
параметра
35 динамического звена к входному его параметру в установившемся квазистационарном режиме, т.е. стационарном для малых (относительно пгриода износа рабочих органов) интервалов времени. В данном случае состояние сменных рабочих органов машинл как передаточная функция динамического звена выражено отношением нагрузки на главный привод хлопкоперерабагывающей ма40
5
шины UH валиков
Р где Р
к частоте вращенигэ питающих
и„в .
-Ул..
и,
пе
I
ilHE
(1)
0
5
и„ пе
выражена напряжением, прямо пропорциональным численному значению отношени:Я U и ; выражена напряжен|ием, прямо пропорциональным току нагрузки на привод машины; выражена напряжением, пропорциональным щения питающих валиков, подающих хлопок в перерабатывающую машину.
прямо частоте вра-
Значение состояния рабочих органов Р необходимо определить в устано вившемся режиме на коротком интерва ле времени, соизмеримым с временем переходного процесса по возмущению для данного типа машин, но несоизмеримо, малым для интервала времени, в течение которого происходит полньш износ рабочих органов. Установившийся режим нужен для того, чтобы исключить ошибки, связанные с отклонениями в материальном балансе процесса переработки хлопка, вызываемыми случайными возмущениями как по входу в процесс локальное изменение плотности или влажности хлопка), так и по выходу из него (локальное изменение выхода готовой продукции из-за переуплотнения или разрыхления хлопка в рабочей зоне машины.
Допустимое значение степени износа сменных рабочих органов машины Р,
/
задаваемое задатчиком 4, определяется экспериментально для каждого типа машины и сорта перерабатываемого хлопка. Для этого при переработке хлопка определенного сорта через достаточно частые интервалы времени проверяют известными способами качество получаемой продукции и при постепенном снижении ее по мере износа рабочих органов выявляют момент времени, когда она достигает значения, предельно допустимого для данного сорта хлопка. В этот момент и определяется числовое значение степени износа, допустимое для данного сорта, путем измерения U,, и Una и вычисления отношения Uf, к Опв. Величина напряжения, пропорциональная Р, задается задатчиком 4 как допустимая степень износа рабочих органов при переработке определенного сорта хлопка. Постоянная времени С, на величину которой рассчитывается блок 8 задержки времени, определяется один раз для определенного типа хлопкоперера- батывающей машины. Для этого на вход машины, работающей в нормальном режиме, подают подкрашенный каким-либо красителем комок хлопка и засекают время, затем при выходе из машины подкрашенной продукции замеряют длительность прохождения подкрашенного хлопка в процессе его переработки. Получаемое числовое значение времени является расчетным временем транспортного запаздьгоания этого типа ма-
33722
шины, а также основным и постоянным
параметром блока 8 задержки времени.
Автоматический контроль состояния
сменных рабочих органов машины в статике осуществляется непрерьшным измерением в установившемся режиме датчиками 1 и 6 нагрузки на привод машины и и частоты вращения питающих ликов и вычислением в делителе 7 их отношения п (1) т.е. непрерывно определяется медленньй дрейф во времени передаточной функции перерабатывающей машины, причем дрейф ее пря15 МО прЬпорционально зависит от изменения состояния рабочих органов по мере износа их в процессе переработки (например, затупление зубьев пил пильных цилиндров в джинах и линте2Q pax). По величине отношения Р определяется состояние рабочих органов в каждый момент времени, а сравнением его значения в сумматоре 3 с допусти-, мым для данного процесса и сорта пе-
25 рерабатываемого материала значением, задаваемым задатчиком 4 ресурса, по их разности, индицируемой индикатором 5, автоматически контролируется наличие ресурса Рр Р - Р, . При до30 стижении равенства текущего значения . Р и заданного Р в сумматоре 3 формируется сигнал вьфаботки ресурса сменньк рабочих органов машины, т.е.
35
Рр Р - PJ О,
при этом в индикаторе Ь включается предупредительная сигнализация.
Дпя обеспечения правильного определения текущего состояния сменных рабочих органов работающей машины от-
4Q ношение п (1) вычисляется при уста- новивиихся значениях параметров и„ и , т.е. из контроля, автоматически с помощью выключателя 2 исключаются временные интервалы, в которые
45 происходит пуск, останов или переходной процесс, связанный с переходом на новый режим или регулированием по возмущениям. Установившийся режим работы машины определяется из условия
cQ равенства текущего значения состояния Р предыдущему значению его Р , измеренному ранее на время Г , равное времени прохождения перерабатываемого материала в машине от входа до выgg хода из нее, т.е. Р Р . Время S. достаточно для установления факта установившегося режима работы машины, но не влияет на изменение Р, так как оно несоизмеримо мало (. 1-20 с)
по сравнению с периодом времени, необходимым для износа рабочих органов (износ пил для джинов и линтеров происходит за время, равное от 50 до 300 ч непрерывной работы машины). Существование равенствс, Р Р опреде™ ляется с помощью нуль-органа 9 и блока 8 задержки времени, дот:я чего на вход нуль-органа 9 одновременно пода™ ется значение текущего состояния рабочих органов Р с выхода делителя 7 вычислений и через блок 8 задержки времени значение, измеренного и вычисленного ранее на время Г , состояния рабочих органов . При существовании равенства Р Р- нуль- орган 9 формирует на выходе управляющий сигнал, который, включая вы-
ключатель 2, разрешает постоянную за- 20 отношение нагрузки на привод рабочих пись в блок 10 памяти из сумматора 8 органов в качестве вращения питающих валиков в установившемся режиме работы хлопкоперерабатываюцей машины.
Рр . При
30
3S
значение ресурса Р. рабочих органов машины. К блоку 10 памяти подключен индикатор 5, показывающий содержимое блока памяти в данньй момент вре- 25 мени, т.е. текущее значение нарушении равенства Р Р-, (т .е. Р РЛ ) то свидетельствует о пере-ходе устройства в динамический режим работы (т.е. при пуске, перенастройке, останове или автоматическом регулировании по случайному возмуще-. нию), нуль-орган 9 формирует сигнал, отключающий с помощью выключателя 2 блок 10 памяти от сумматора 3. В этом случае индикатор 5 показывает последнее записанное в блоке 10 памяти до сбоя установившегося режима текущее значение „ до тех пор, пока в процессе переработки не пройдет переходный процесс и вновь не. установится установившийся режим, т.е. пока не восстановится равенство Р Р . При каждом повторном восстановлении этого равенства выключатель 2 автоматически подключает блок 10 памяти к выходу сумматора 3 для регулярной перезаписи текущего изменения ресурса рабочих органов Р . При достижении сумматора 3 значения ресурса Р. О- индикатор 5 сформирует предупредительный сигнал о полном
2. Устройство для контрсЬля работы хлопкоперерабатьгоающей машины, содержащее датчик нагрузки на п)ивод рабочих органов, сумматор, подключенный выходом к входу вьжлючателя и индикатор, отличающее что,- с целью расширения те ких возможностей путем обе контроля состояния сменных органов, оно снабжено датч тоты вращения питающих вал
я тем, нологичес- спечения рабочих iKOM часиков , де40
литель, блок задержки времени, нуль- орган, задатчик ресурса раЗоты сменных органов и блоком памят);, причем датчик нагрузки на привод рабочих органов и датчик частоты врарения питающих валиков подключены k соответствующим входам делителя, выход которого подключен к входу блоха задержки времени и к первым входам нуль-ор- g гана и сумматора, вторым выходом сое- диненно го с задатчиком ресурса работы сменных органов, при этры нуль- орган связан вторым входом с выходом блока задержки времени, а выходом - с входом управления выключат|еля, выход которого через блок памяти подключен к индикатору.I ,
50
окончании заданного задатчи|сом 4 ресурса работы сменных рабочи|с органов
хлопкоперерабатывающей .
Формула изобр
е г е н и я
. 1. Способ контроля работы хлопкоперерабатывающей машины, за|ключающий- ся в том, что контролируют нагрузку на привод рабочих органов, о т л и - чающийся тем, что, с целью расширения технологических возможное тей путем обеспечения контголя сос- тояния сменных рабочих органов, дополнительно контролируют и1-:тенсив- ность подачи волокна в хлогжоперера- батывающую машину, а состояние смен- ных рабочих органов определяют как
2. Устройство для контрсЬля работы хлопкоперерабатьгоающей машины, содержащее датчик нагрузки на п)ивод рабочих органов, сумматор, подключенный выходом к входу вьжлючателя и индика
тор, отличающее что,- с целью расширения те ких возможностей путем обе контроля состояния сменных органов, оно снабжено датч тоты вращения питающих вал
я тем, нологичес- спечения рабочих iKOM часиков , де
литель, блок задержки времени, нуль- орган, задатчик ресурса раЗоты сменных органов и блоком памят);, причем датчик нагрузки на привод рабочих органов и датчик частоты врарения питающих валиков подключены k соответствующим входам делителя, выход которого подключен к входу блоха задержки времени и к первым входам нуль-ор- гана и сумматора, вторым выходом сое- диненно го с задатчиком ресурса работы сменных органов, при этры нуль- орган связан вторым входом с выходом блока задержки времени, а выходом - с входом управления выключат|еля, выход которого через блок памяти подключен к индикатору.I ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля производительности батареи хлопкоперерабатывающих машин | 1989 |
|
SU1687659A1 |
| Способ контроля производительности хлопкоперерабатывающей машины и устройство для его осуществления | 1987 |
|
SU1418612A1 |
| Устройство для управления процессом джинирования | 1986 |
|
SU1395701A1 |
| Устройство управления хлопкоочистительной машиной | 1986 |
|
SU1514844A1 |
| Устройство для управления приводом хлопкоочистительной машины | 1982 |
|
SU1097724A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ КОНУСНЫХ ЭКСЦЕНТРИКОВЫХ ДРОБИЛОК | 1992 |
|
RU2023512C1 |
| Привод хлопкоочистительной машины | 1980 |
|
SU874780A1 |
| Устройство для регулирования температуры | 1980 |
|
SU877491A1 |
| Устройство для определения количества однотипных предметов в партии | 1990 |
|
SU1783316A1 |
| Устройство управления процессом бурения | 1986 |
|
SU1418469A1 |
Изобретение относится к текстильной промьшленности, к оборудованию для переработки хлопка-сырца, например валичным джинам, линтерам . Целью изобретения является расширение технологических возможностей путем обеспечения контроля состояния сменных рабочих органов, которое определяется как отношение нагрузки на привод рабочих органов к частоте вращения питающих валиков в установившемся режиме. Устройство содержит датчик 1 нагрузки на привод рабочих ор- . ганов и датчик 6 частоты вращения пи-, тающих валиков, делитель 7, блок 8 задержки, нуль-орган 9, выключатель 2, сумматор 3,.задатчик 4 ресурса работы сменных рабочих органов, индикатор 5 и блок 10 цамяти. Переход машины в установившийся режим определяется по практическому отсутствию изменения выходного сигнала делителя 7, поступающего с задержкой через блок 8 на первый вход и без задержки на второй вход нуль-органа 9. Запись значения выходного сигнала алгебраическо- го сумматора, характеризующего степень приближения рабочих органов к моменту необходимости их смены, в блок 10 памяти осуществляется при подаче от нуль-органа 9 сигнала на открывание выключателя 2. 2 с.п.ф-лы, 1 ил. (Л СА СО 00 э N5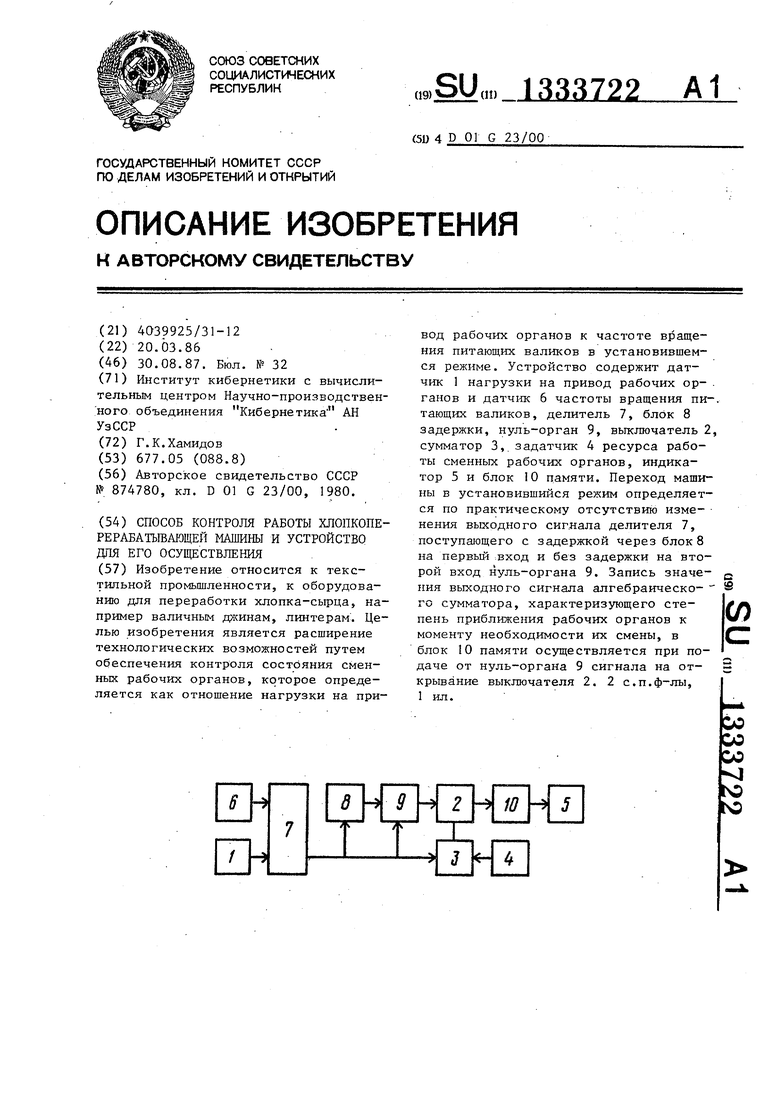
| Привод хлопкоочистительной машины | 1980 |
|
SU874780A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
