Изобретение относится к системам управления, управляемых вычислительными устройствами, и предназначено для управления скоростью двигателя.
Цель изобретения - повышение надежности системы.
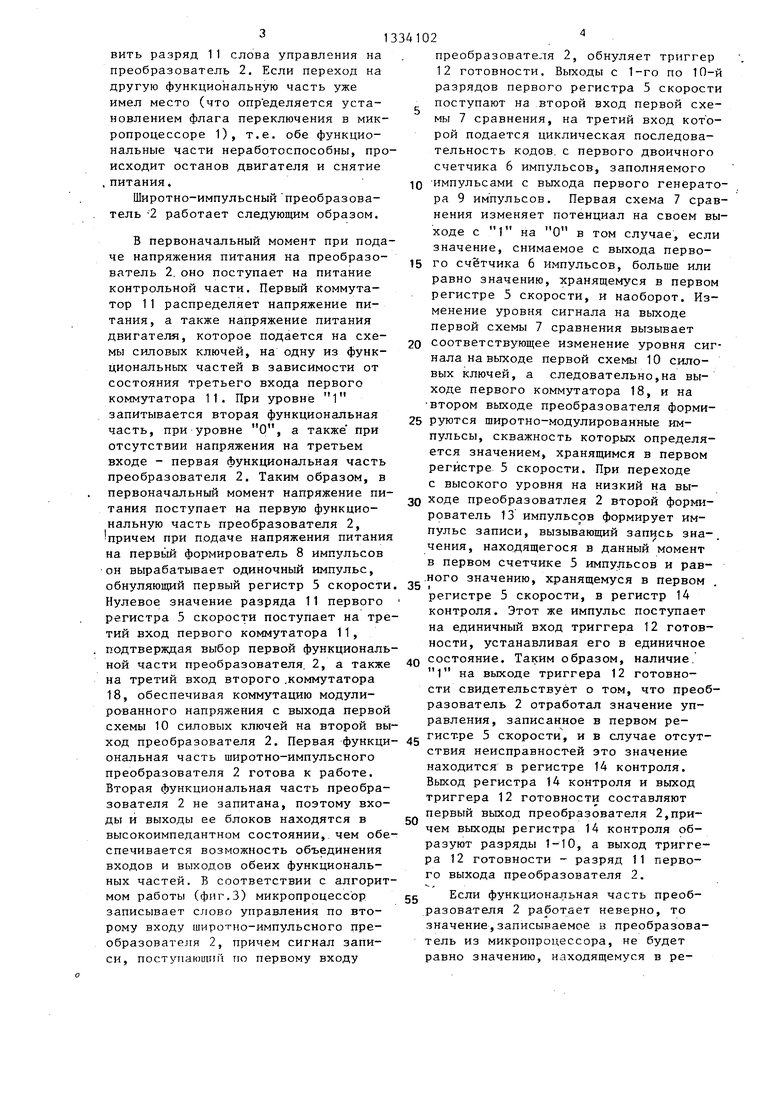
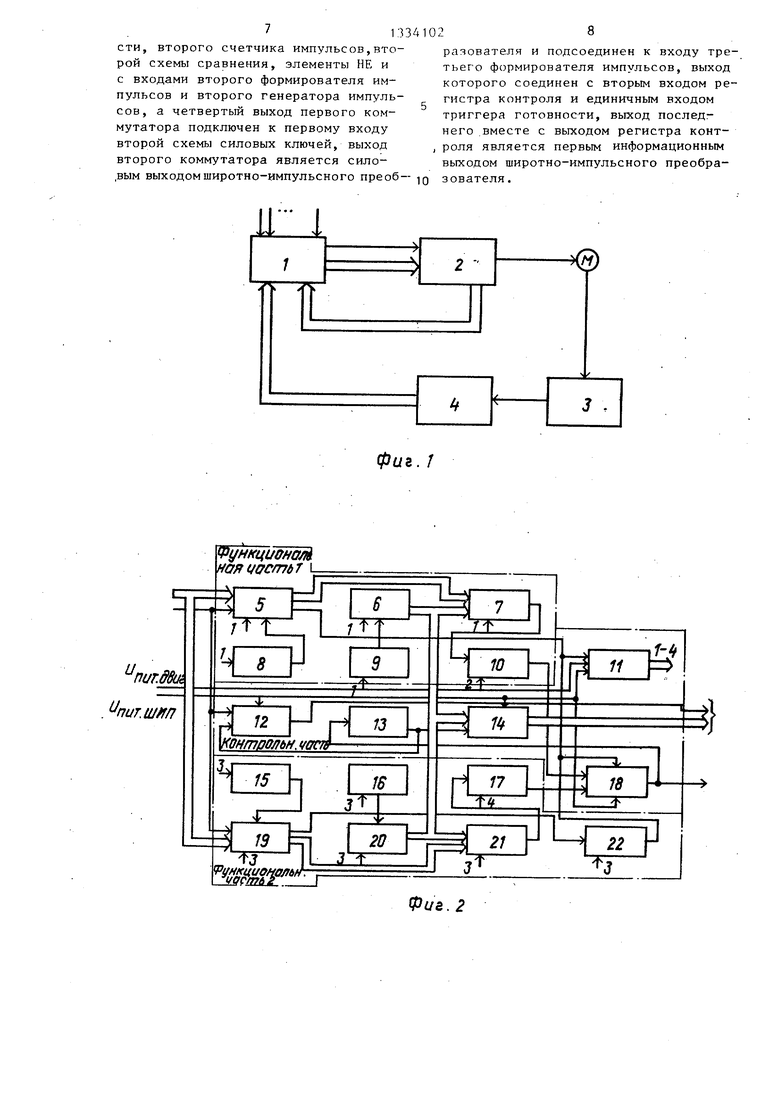
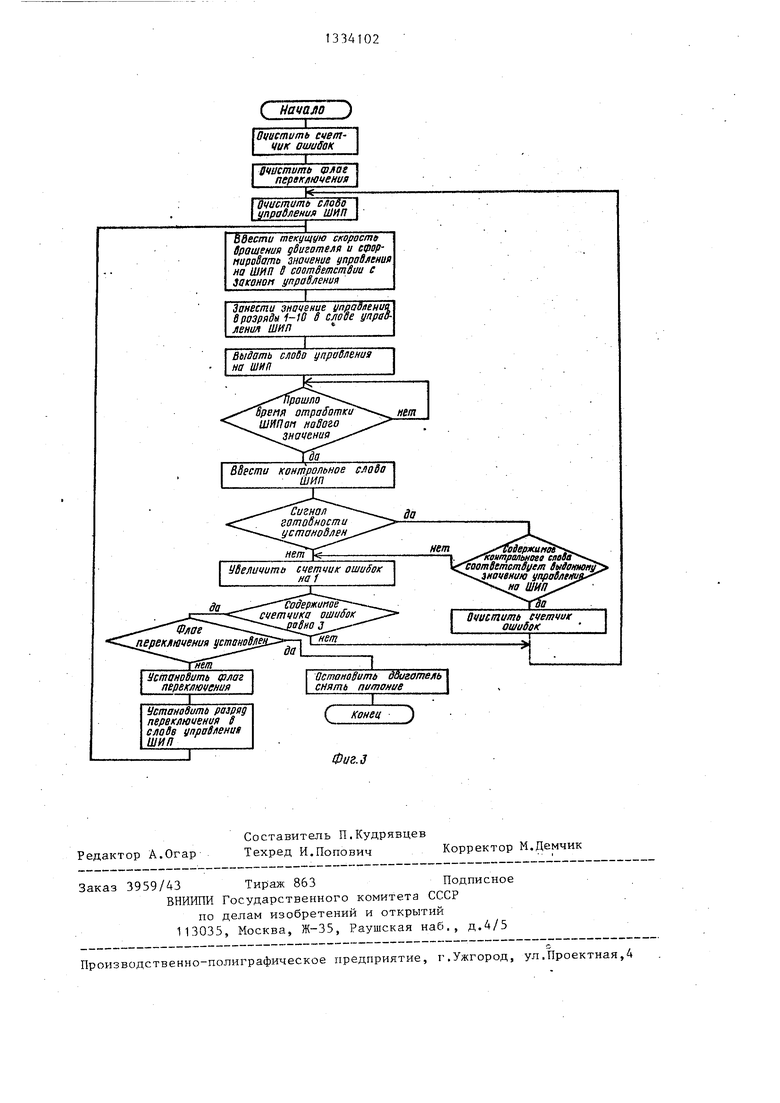
На фиг.1 приведена блок-схема цифровой системы управления электроприводом; на фиг.2 - схема широтно-им- пульсного преобразователя;на фиг.З - алгоритм работы микропроцессора.
Цифровая система управления электроприводом (фиг.1) состоит из мик- р опроцессора 1, широтно-импульсного преобразователя 2, электродвигателя М, импульсного датчика 3 скорости и преобразователя 4 сигнала, в качестве которого может быть использован счетчик импульсов совместно с преобразователем уровня.
Широтно-импульсный преобразователь 2 содержит регистр 5 скорости, счетчик 6 импульсов, схему 7 сравнения, формирователь 8 импульсов, генератор 9 импульсов, схему 10 силовых ключей, коммутат ор 11, триггер 12 готовности, формирователь 13 импульсов, регистр 14 контроля, формирователь 15 импульсов, генератор 16 импульсов, выполненный .аналогич- но генератору 9 импульсов, схему 17 силовых ключей, коммутатор 18, реистр 19 скорости, выполненный, например, как регистр 5 скорости и регистр 14 контроля, счетчик 20 импульсов, выполненный так же, как счетчик 6 импульсов, схему 21 сравнения, р еализованную аналогично схеме 7 сравнения, и схему НЕ 22.
Широтно-импульсный преобразователь может быть условно разделен на первую функциональную часть, в состав которой входят блоки 5-10, вторую функциональную часть, содержащую блоки 15-17 и 19-22, и контрольную часть,включающую блоки 11-14 и 18.
Система работает следующим образом.
Через фиксированный промежуток времени микропроцессор 1 вводит текущее значение скорости вращения двигателя, снимаемое с преобразователя 4 сигнала (фиг.З). На основании сравнения этого значения с уставкой хранящейся в памяти микропроцессора 1, и в соответствии с заданным законом управления микропроцессор 1 формирует значение управления на широтf
но-импульсный преобразователь 2.Затем формируется и выдается на широт- но-импульсный преобразователь одиннадцатиразрядное слово управления, причем разряды 1-10 содержат з.наче- ние управления на преобразователь 2, разряд 11 определяет, продолжается ли работа с выбранной ранее функциональной частью преобразователя 2 (в случае, если разряд 11 обнулен) либо необходим переход на другую функциональную часть (если разряд 11 установлен) . Запись нового слова управления на широтно-импульсный преобразователь 2 производится по сигналу с первого выхода микропроцессора (сигнал записи), с помощью которого информация, установленная на
втором выходе микропроцессора (оДин- надцатиразрядное слово управления), переписывается в преобразователь 2. Микропроцессор вводит по своему второму входу с широтно-импульсного
преобразователя 2 одиннадцатиразрядное контрольное слово. Разряды 1-10 контрольного слова содержат значение управления, фактически отработанное преобразователем, а разряд 11
содержит сигнап готвности, который может быть установлен в 1, если преобразователь 2 отработал это значение, или обнулен, если преобразователь 2 неисправен или не успел
отработать значение управления. Пре- образова тель 2 работает неверно, если по истечении времени, необходимо-, го для отработки им нового записанного слова управления, сигнал готовности не установлен или если при установленном сигнале готовности значение управления, принятое микропроцессором, не равно значению управления, вьщанному микропроцессором на
преобразователь 2. Функциональная часть, работающая в данный момент в преобразователе 2, считается неисправной, если три раза подряд определяется, что она работает неверно. Счет до трех необходим для исключения ошибочного принятия решения при случайных сбоях и после переключения функциональных частей (в этом
случае один цикл преобразователя ра- ботает с нулевым значением управления) . Для перехода на другую функ- циональную часть, в случае, если работающая функциональная, часть признана неисправной, необходимо установить разряд 11 слова управления на преобразователь 2. Если переход на другую функциональную часть уже имел место (что опр еделяется установлением флага переключения в микропроцессоре 1), т.е. обе функциональные части неработоспособны, происходит останов двигателя и снятие ,питания,
Широтно-импульсный преобразователь -2 работает следующим образом.
В первоначальный момент при подаче напряжения питания на преобразователь 2.оно поступает на питание контрольной части. Первый коммутатор 11 распределяет напряжение питания, а также напряжение питания двигателя, которое подается на схемы силовых ключей, на одну из функциональных частей в зависимости от состояния третьего входа первого коммутатора 11. При уровне 1 запитывается вторая функциональная часть, при уровне О, а также при отсутствии напряжения на третьем входе - первая функциональная часть преобразователя 2. Таким образом, в первоначальный момент напряжение питания поступает на первую функциональную часть преобразователя 2, причем при подаче напряжения питани на первьш формирователь 8 импульсов он вьфабатывает одиночный импульс, обнуляющий первый регистр 5 скорости Нулевое значение разряда 11 первого регистра 5 скорости поступает на третий вход первого коммутатора 11,
контроля. Этот же импульс поступает на единичный вход триггера 12 готовности, устанавливая его в единичное
подтверждая выбор первой функциональной части преобразователя. 2, а также 40 состояние. Таким образом, наличие
на третий вход второго .коммутатора t8, обеспечивая коммутацию модулированного напряжения с выхода первой схемы 10 силовых ключей на второй на выходе триггера 12 готовности свидетельствует о том, что преобразователь 2 отработал значение управления, записанное в первом рехо7преобраз оват еля 2Гпёрвая функцй - 45 скорости и в случае отсут- ональная часть широтно-импульсного неисправностей это значение
находится в регистре 14 контроля.
преобразователя 2 готова к работе. Вторая функциональная часть преобразователя 2 не запитана, поэтому входы и выходы ее блоков находятся в высокоимпедантном состоянии, чем обеспечивается возможность объединения входов и выходов обеих функциональных частей. В соответствии с алгоритмом работы (фиг.З) микропроцессор записывает слово управления по второму входу широтно-импульсного преобразователя 2, причем сигнал записи, поступающий по первому входу
50
55
Выход регистра 14 контроля и выход триггера 12 готовности составляют первый выход преобразователя 2,причем выходы регистра 14 контроля образуют разряды 1-10, а выход триггера 12 готовности - разряд 11 первого выхода преобразователя 2.
Если функциональная часть преобразователя 2 ра1ботает неверно, то значение,записываемое в преобразователь из микропроцессора, не будет равно значению, находящемуся в репреобразоватеотя 2, обнуляет триггер 12 готовности. Выходы с 1-го по 1П-Й разрядов первого регистра 5 скорости поступают на второй вход первой схемы 7 сравнения, на третий вход кот о- рой подается циклическая последовательность кодов, с первого двоичного счетчика 6 импульсов, заполняемого 0 импульсами с выхода первого генератора 9 импульсов. Первая схема 7 сравнения изменяет потенциал на своем выходе с 1 на О в том случае, если значение, снимаемое с выхода перво- 5 го счётчика 6 импульсов, больше или равно значению, хранящемуся в первом регистре 5 скорости, и наоборот. Изменение уровня сигнала на выходе первой схемы 7 сравнения вызывает 0 соответствующее изменение уровня сигнала на выходе первой схемы 10 силовых ключей, а следовательно,на выходе первого коммутатора 18, и на втором выходе преобразователя форми- 5 руются широтно-модулированные импульсы, скважность которых определяется значением, хранящимся в первом регистре 5 скорости. При переходе с высокого уровня на низкий на вы- 0 ходе преобразоватлея 2 второй формирователь 13 импульсов формирует импульс записи, вызывающий запись зна-. чения, находящегося в данный момент в первом счетчике 5 импульсов и равного значению, хранящемуся в первом
5 с /
регистре 5 скорости, в регистр 14
контроля. Этот же импульс поступает на единичный вход триггера 12 готовности, устанавливая его в единичное
состояние. Таким образом, наличие
1 на выходе триггера 12 готовности свидетельствует о том, что преоб50
55
Выход регистра 14 контроля и выход триггера 12 готовности составляют первый выход преобразователя 2,причем выходы регистра 14 контроля образуют разряды 1-10, а выход триггера 12 готовности - разряд 11 первого выхода преобразователя 2.
Если функциональная часть преобразователя 2 ра1ботает неверно, то значение,записываемое в преобразователь из микропроцессора, не будет равно значению, находящемуся в ре51334102
14 контроля. Для перехода на
щ ны ги со сх им д
другую функциональную часть микропроцессор однократно выдает на преобразователь 2 слово управления с установленным в 1 разрядом 11. При этом уровень 1 с второго выхода первого регистра 5 скорости поступает на третий вход первого коммутатора 11, вызывая снятие питающих напряжений с первой функциональной части и подачу их на вторую функциональную часть преобразователя 2, и на третий вход второго коммутатора 18, обеспечивая коммутацию широтно- модулированного напряжения на второй выход преобразователя 2. При поступлении напряжения питания на третий формирователь 15 импульсов последний вырабатывает одиночный импульс, обнуляющий второй регистр 19 скорости. Нулевое значение разряда 11 второго регистра 19 скорости поступает на схему НЕ 22, а единичное значение с выхода последней - на третий вход первого коммутатора 11 и третий вход второго коммутатора 18, подтверждая тем самым работу второй функциональной части преобразователя 2. Дальнейшая работа преобразователя 2 аналогична описанной; отличие заключается в том, что вместо блоков первой функциональной части, входы и.выкоды которых при отключении питания находятся в высокоимпедантном состоянии, работают соответствующие им блоки второй функциональной части преобразователя 2.
Формула изобретения
t
1. Цифровая система управления электроприводом, содержащая последовательно соединенные двигатель, импульсный датчик скорости и преобразователь сигнала, выход которого соединен с управляющим входом микропроцессора, отличающая, ся тем, что, с целью повышения надежности системы, в нее введен широтно-импуль- сный преобразователь, управляющий вход и информационный вход которого соединены с соответствующими функциональными выходами микропроцессора а силовой выход и информационный выход широтно-импульсного преобразователя подключены к входу двигателя и входу контроля микропроцессора соответственно .
2. Система по п. 1 , о т л и ч а ю- щ а я с я тем, что широтно-импульс- ный преобразователь содержит два ре- гистра скорости, два счетчика импульсов, два генератора импульсов, две схемы сравнения, три формирователя импульсов, две схемы силовых ключей, два коммутатора, триггеры готовности,
регистр контроля и элемент НЕ, причем управляющий вход широтно-импульсного преобразователя соединен с четвертыми входами первого и второго регистров скорости и нулевым входом
5 триггера готовности, информационный вход широтно-импульсного преобразователя подключен к третьим входам первого и второго регистров скорости, вторые входы последних подсоединены
0 к выходам первого и второго формирователей импульсов соответственно, а. первые выходы - к вторым входам первой и второй схем сравнения соответственно, второй выход первого
5 регистра скорости соединен с третьими входами первого и второго коммутаторов и с выходом элемента НЕ, второй вход которой подключен к второ- му выходу второго регистра скорости,
0 выходы первого и второго генераторов импульсов подсоединены к вторым входам первого и второго счетчиков импульсов соответственно, а выходы последних-соединены вместе и подключены к третьим входам первой и второй схем сравнения и регистра контроля, выходы первой и второй схем сравнения подключены к вторым- входам первой и второй схем силовых ключей соответственно, выходы последних подсоединены соответственно к первому и четвертому входам второго ком- мутато13а, второй, вход которого соединен с вторым входом первого ком- мутатора,первыми входами триггера готовности и регистра контроля и шиной питания широтно-импульсного преобразователя, шина питания двигателя подключена к первому входу первого коммутатора, первый выход которого подсоединен к первым входам первого регистра скорости, первого счетчика импульсов и первой схемы сравнения, к входам первого формирователя импульсов и первого генератора импуль5
0
0
5
сов, второй выход коммутатора соединен с первым входом первой схемы силовых ключей, третий выход - с первыми входами второго регистра скорости, второго счетчика импульсов,второй схемы сравнения, элементы НЕ и с входами второго формирователя импульсов и второго генератора импульсов, а четвертый выход первого коммутатора подключен к первому входу второй схемы силовых ключей, выход второго коммутатора является сило,вым выходом широтно-импульсного преоб- 1Q зователя.
Я-1
8
разователя и подсоединен к входу третьего формирователя импульсов, выход которого соединен с вторым входом регистра контроля и единичным входом триггера готовности, выход последнего вместе с выходом регистра контроля является первым информационным выходом широтно-импульсного преобрафиг. 1
Фиа. 2
(//gyg/g j Г
Очистить нетчик ошибок
Вчистить срлае nepsк lHl eнuя
Очистить слово упрадления ШИП
ввести текущую скорое/по вращения ддиготелв и ефор- HUpoSamu значение управления на ШИП S соатВетствт е Зокоион управлений
Занести значение управйениа В разряды i-10 в см Be цпраВ- лвния шип
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1993 |
|
RU2079876C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2002 |
|
RU2220440C1 |
| ИМИТАТОР СИГНАЛОВ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ МАГНИТНЫХ ГОЛОВОК ОТНОСИТЕЛЬНО МАГНИТНЫХ ДИСКОВ | 1991 |
|
RU2017239C1 |
| Контроллер измерительного преобразователя | 1987 |
|
SU1462357A1 |
| Устройство для счета предметов,переносимых конвейером | 1982 |
|
SU1072076A1 |
| Контроллер измерительного преобразователя | 1988 |
|
SU1541632A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Устройство для контроля микропроцессорной системы | 1984 |
|
SU1221655A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОГО ДВОИЧНОГО КОДА В ПАРАЛЛЕЛЬНЫЙ КОД | 2001 |
|
RU2188502C1 |
Цифровая система управления . электроприводом относится к системам управления, управляемым вычислительными устройствами. Цель изобретения - повьппение надежности системы за счет обеспечения контроля работоспособности и резервирования широтно-импульс- ного преобразователя. Система состоит из последовательно соединенных двигателя, импульсного датчика скорости и преобразователя сигналов, вы- , ход которого соединен с первым выходом микропроцессора. Новым является то, что в систему введен широтно-им- пульсный преобразователь, первый и второй входы которого соединены соответственно с первым и вторым выходами микропроцессора, а первый и второй выходы подключены к° второму входу микропроцессора и входу двигателя соответственно. При этом широтно-им- пульсный преобразователь содержит два регистра скорости, два счетчика импульсов, две схемы сравнения, три формирователя импульсов, два генератора импульсов, две схемы силовых ключей, два коммутатора, триггер готовности, регистр контроля и схему НЕ. 1 з.п. ф-лы, 3 ил. (Л
Редактор А.Огар
Составитель П.Кудрявцев
Техред И.Попович Корректор М.Демчик
Заказ 3959/43 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| ВСТРОЕННЫЙ ПЛАСТМАССОВЫЙ ВКЛАДЫШ ДЛЯ ТОПЛИВНЫХ БАКОВ ДЛЯ УСЛОВИЙ МИКРОГРАВИТАЦИИ | 2006 |
|
RU2392534C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Schonfeld R.Cleichstrom-Antri- Ebsregelungen-rait Hilfe von Mikro- prozessoren, - Der Vem-Electro-An- lapebau, , Bd | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
