Изобретение относится к робототехнике, а именно к электрохит ическим манипуляторам промышленных роботов, преимущественно работающих в сферической системе коорд ннат.
Цель изобретения - упроп;ение конструкции за счет обеспечения фиксации тяг с помощью электромагнитньк сил.
На чертеже изображен манипулятор, разрез.
Манипулятор имеет привода 1 поступательного перемещения, к штокам которых прикреплены ферромагнитные тяги 2. Приводы закреплены на ферромагнитном основании 3. К основанию с помощью универсальных шарниров А присоединены звенья с пластинами 5, выполненные из ферромагнитного материала. Отверстия 6 служат для расположения, в них ферромагнитных тяг, Вокруг оснований щарннров расположены электрические катушки 7, выводы 8 которых подсоединены к источнику 9 тока. Манипулятор может иметь несколько пластин 5. На крайней из них закреплен схват 10,.
Манипулятор.работает следующим образом.
По командам системы управления приводы 1 осуществляют попарно натягивание и ослабление пар тяг 2, прикрепленных к соответствующим пластинам. В результате пластины поворачиваются в универсальных шарнирах, заСоставитель Ф.Майоров Редактор В.Петраш Техред Л.Олийнык Корректор С.Шекмар
Заказ 4010/16Тира;к 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие,, г. Ужгород, ул. Проектная, 4
5
0
5
0
Гз
давая схвату 0 ориентацию. Фиксация обеспечивается тем, что к катушкам 7 подключается источник 9 и по ним начинает протекать ток.
Таким образом, ферромагнитные тяги 2 и пластины 5 Притягиваются друг к другу. Направление поля показано линиями 11. Обеспечивается магнитная фиксация тяг 2 и пластин, т.е. всей манипуляционной системы. Кроме того, поскольку тяги 2 оказываются зафиксированными между пластинами, длина их свободных участков уменьшается, что приводит к увеличению жесткости манипулятора. Формула изобретения
Манипулятор, содержащий основание, шарнирно связанные между собой звенья с пластинами, в которых выполнены отверстия, приводы поступательного перемещения, установленные на основании, а также расположенные в отверстиях пластин гибкие тяги, один конец каждой из которых закреплен на соответствующей пластине, а другой связан с приводом поступательного пере- мещеш1я, отличающийся тем, что, с целью упрощения конструк- гши за счет обеспечения фиксации тяг с помощью электромагнитных сил, он снабжен электрическими катушками, расположенными вокруг шарниров, а основание, звенья, пластины и тяги выполнены из магнитопроводного материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
Изобретение относится к робототехнике, а именно к электромеханическим манипуляторам промьшленных роботов , преимущественно работающих в сферической системе координат. Целью изобретения является упрощение конструкции за счет обеспечения фиксации тяг с помощью электромагнитных сил. Перемещение звеньев манипулятора осуществляется натягиванием и ослаблением пар тяг 2, прикрепленных к соответствующим пластинам 5. Фиксация звеньев манипулятора осуществляется за счет электромагнитных сил притяжения, возникающих между тягами 2 и пластинами 5 при подключении катушек 7 к источнику тока 9. 1 ил. (Л 00 Слд ел 4 4 //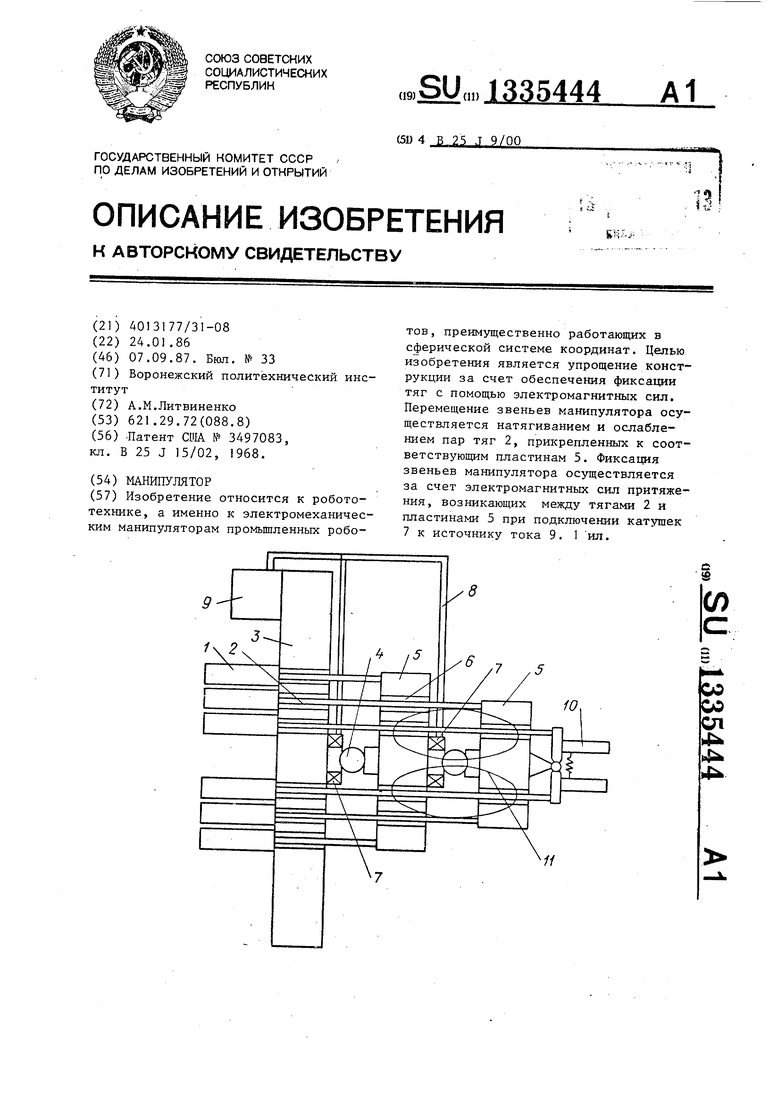
| -Патент США № 3497083, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
