Изобретение относится к робототехнике, а именно к выполнению схватов промышленных роботов и манипуляторов Целью изобретения является расширение технологических возможностей манипулятора за счет обеспечения возможности повторной работы схвата в любой точке рабочей зоны манипулятора.
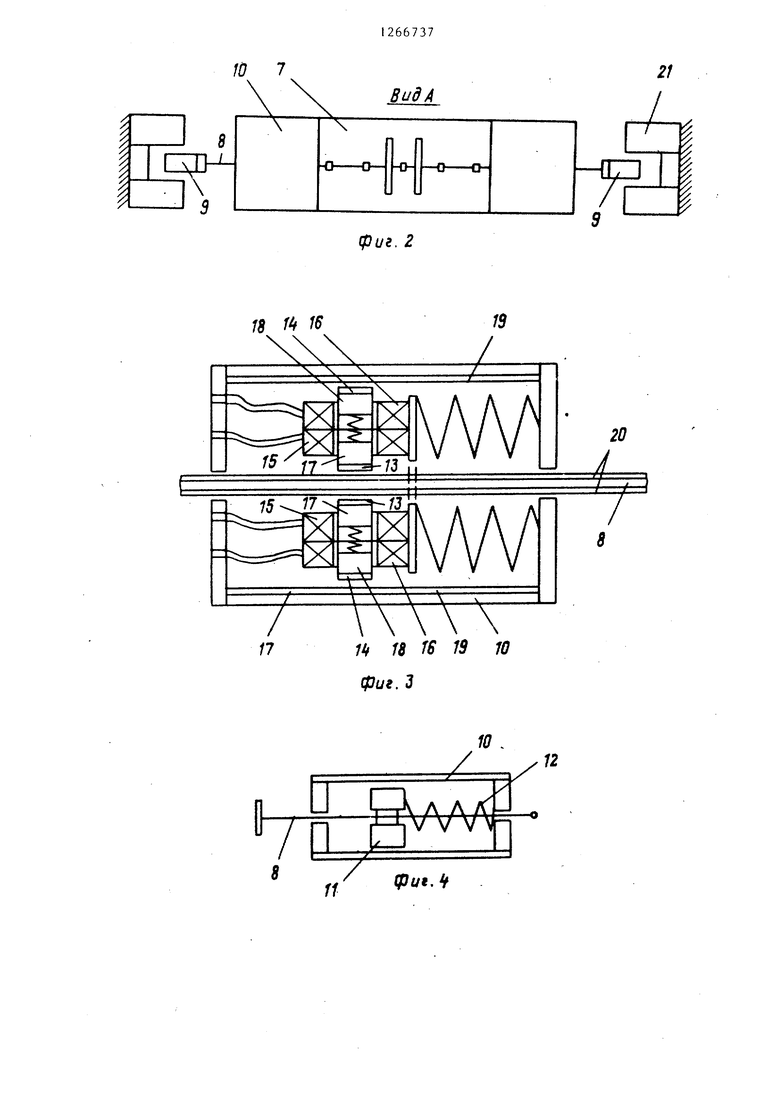
На фиг. 1 показан привод схвата манипулятора общий вид; на фиг. 2 вид А на фиг. 1; на фиг, 3 узел фиксации ползуна; на фиг. 4 - 8 различные фазы движения штока,
Привод содержит два двуплечих рычага 1 и 2, связанных шарниром 3 между собой и основанием 4. Одни плечи рычагов 1 и 2 подпружинены друг к другу пружиной 5, а другие - несущие губки 6 связаны через тяги 7 со штоками 8, на концах которых закреплены электрические катушки 9. Штоки 8 расположены внутри корпусов 10, закрепленных на основании. Между штоками 8 и корпусами 10 расположены ползуны 11, подпружиненные к корпусам пружинами 12. На ползунах 11 установлены фиксаторы 13 и 14 с приводом их перемещения, выполненным, например, в виде соленоидов 15 и 16 с подпружиненным - к ним якорями 17 и 18, на которых закреплены фиксаторы 13 и 14, Навнутренней поверхности корпусов 10 и поверхности штоков закреплены накладки 19 и 20, взаимодействующие с фиксаторами 13 и 14. По крайней мере в одной из зон работы схвата установлены две магнитные системы 21 с зазорами для размещения в них катушек 9.
Устройство работает следующим образом.
При выдвижении схвата в рабочую зону катушки 9 попадают в зону магнитных систем 21, подготавливая его к раздвижению губок 6. При подключении электрических катушек 9 к источнику электрической энергии (не показан) их витки, помещенные в магнитное поле, испытывают действие электромеханических сил, разводяш 1:х губки 6 и сжимающих пружину 5. При
этом происходит освобождение тахваченной ранее детали или тк)Д1Х5т()вка к ее захвату. Обратный ход губок происходит при отключении тока в электрических катушках 9 под действием пружины 5, При этом соленоиды 15 и 16 постоянно подключены к источнику электрической энергии.
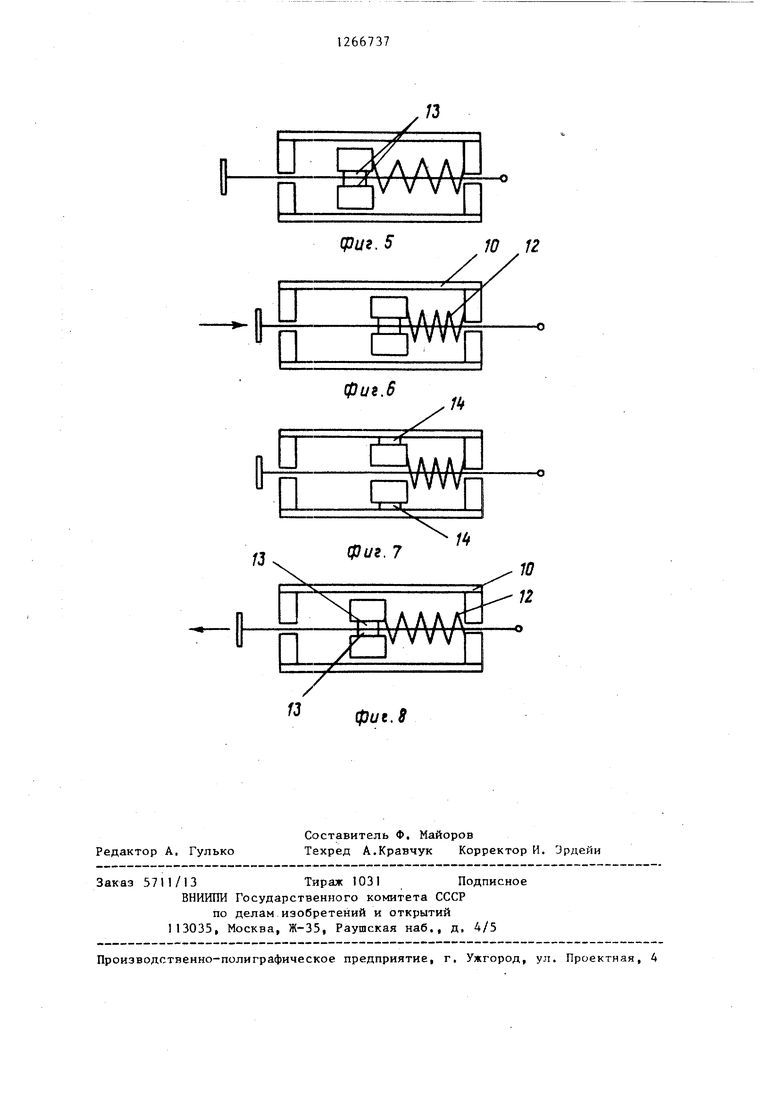
В том случае, когда дальнейшая работа схвата должны происходить в зоне, не имеющей магнитных систем, после раскрытия схвата под действием электромеханических сил, создаваемых витками электрических катушек 9 (фиг. 4), отключаются соленоиды 15 и фиксаторы 13 под действием пружин прижимаются к накладкам 20 штоков 8, фиксируя тем ползуны 11 относительно штоков 8 (фиг. 5) Затем направление тока в электрических катушках 9 реверсируется и происходит сведение губок и сжатие пружин 12 (фиг. 6) под действием пружины 5 и электромеханических сил, действующих на витки катушек 9 после реверсирования тока. После сведения губок 6 или захвата детали выключаются соленоиды 16 и включаются соленоиды 15, что приводит к фиксации ползунов 11 относительно корпусов 10 и их расфиксация относительно штоков 8 (фиг. 7). При этом электромеханическая энергия, создаваемая витками электрических катушек 9, запасается в виде потенциальной энергии сжатой пружины 12, которая остается в таком состоянии после отключения электрических катушек 9 и перемещения схвата на другую позицию.
Для раз-ведения губок 6 схвата достаточно отключить соленоиды 15 и включить соленоиды 16, При этом под действием пружин 12 произойдет разведение губок 6 схвата (фиг. 8), последующее сведение которых возможно при расфиксации фиксаторов 13 путем включения соленоидов 15.
Дальнейшая работа схвата возможна после возвращения его в рабочую зону, снабженную магнитными системами 21 .
Ш 7
21
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Устройство для захвата и перемещения электропроводных материалов | 1983 |
|
SU1199584A1 |
| Схват манипулятора | 1986 |
|
SU1423371A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Привод схвата манипулятора | 1986 |
|
SU1373566A2 |
| Схват манипулятора | 1985 |
|
SU1268403A1 |
ПРИВОД СХВАТА МАНИПУЛЯТОРА, содержащий два двуплечих рычага, шарнирно связанных между собой и с основанием, одни плечи которых подпружинены друг к другу, a другие - несущие губки - связаны через штоки с электрическими катушками, a две магнитные системы, установленные в зоне работы схвата с возможностью взаимодействия с электрическими катушками, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения повторной работы схвата в различных точках рабочей зоны манипулятора, он снабжен двумя корпусами, охватывающими штоки и жестко связанными с основанием, двумя ползунами, установленными внутри корпусов и подпружиненными к ним, и фиксаторами с приводами их перемещения, установленными на ползуне.с возможностью взаимодействия с поверхностями штоков и с внутренними поW верхностями корпусов. Cb а со W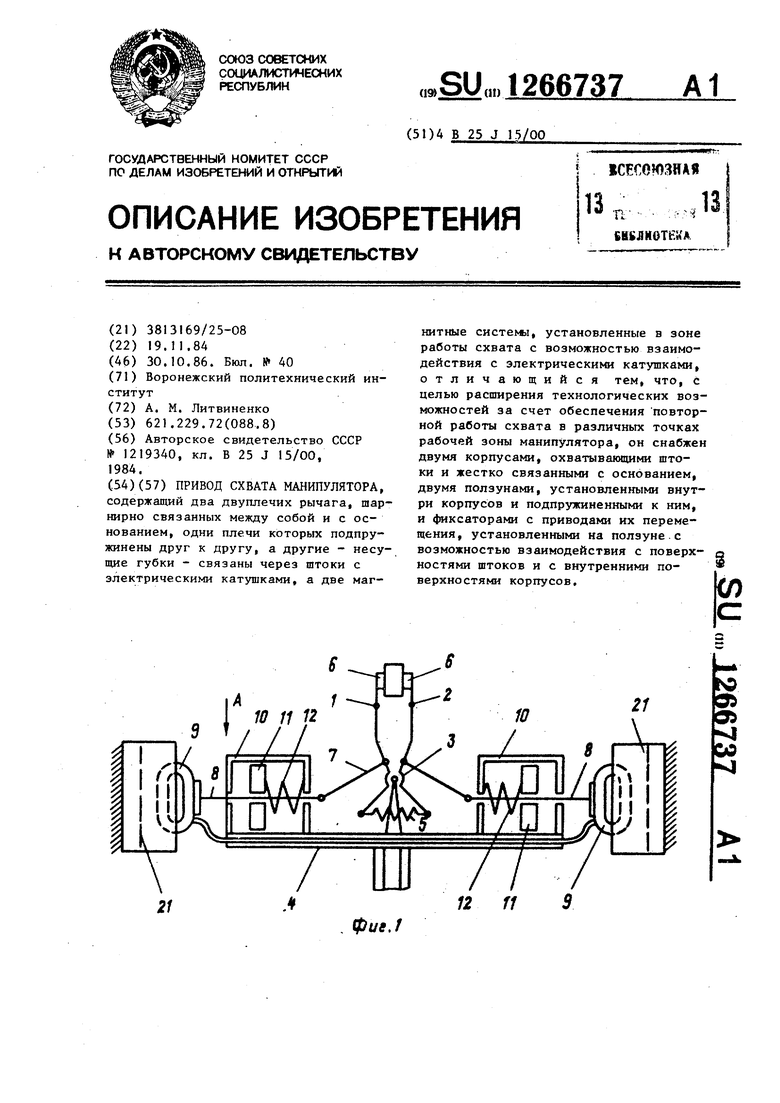
1 5
/ tpui.tf
20
Ht rS fS 19 Ю фиг. 3
W
/
12
(JDi/a. 5
фиг.6
Ю 12
Ik
| Схват манипулятора | 1984 |
|
SU1219340A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
