Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов.
Цель изобретения - расширение технологических возможностей и повышение надежности за счет расширения диапазона размеров захватываемых заготовок, увеличения поверхности обхвата заготовок зажимным элементом, обеспечения контроля усилия захвата.
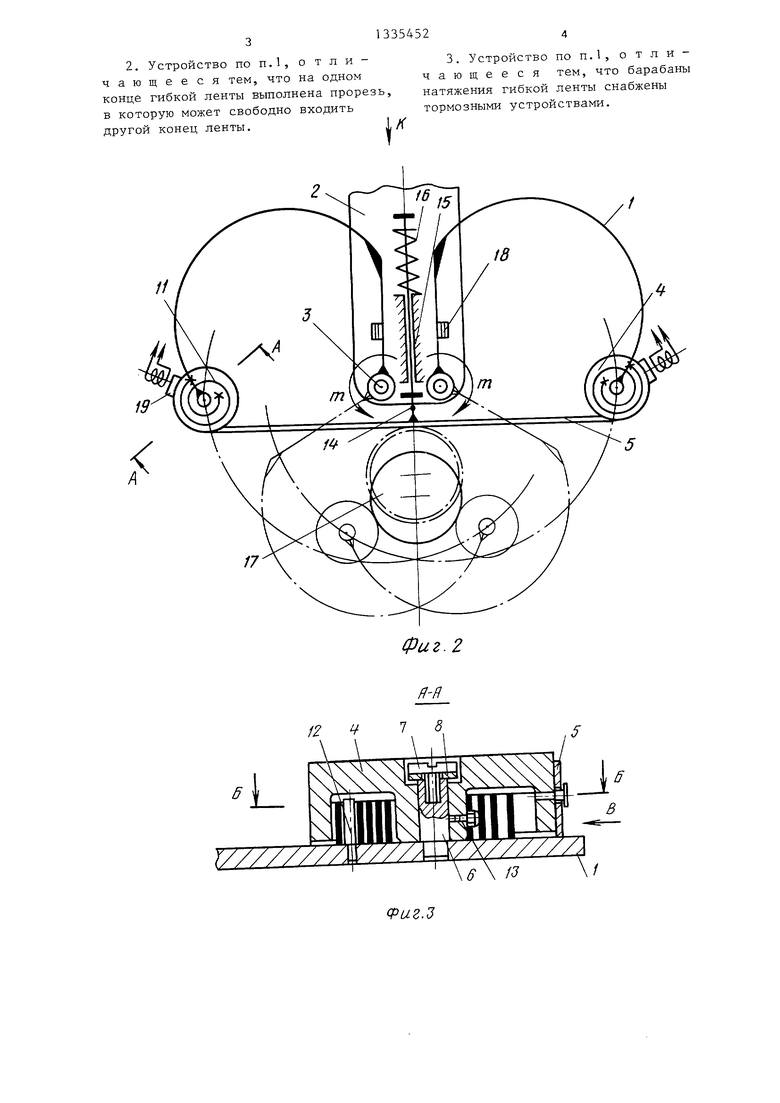
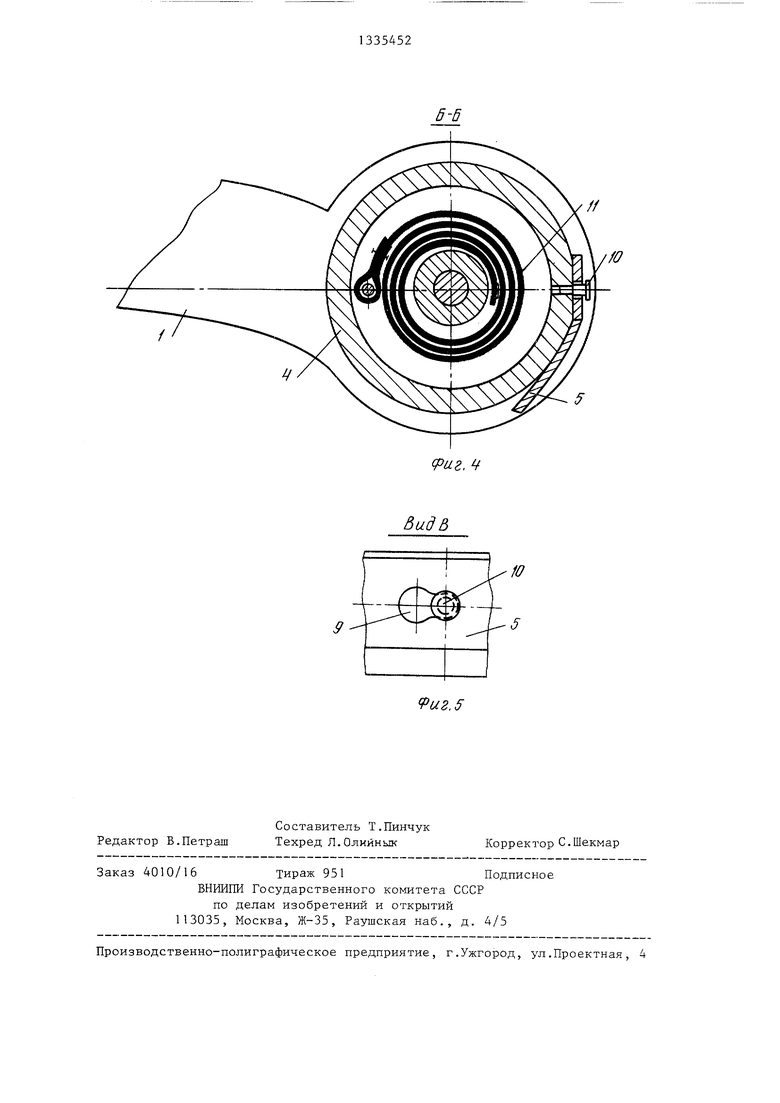
На фиг.1 изображено захватное устройство, общий вид; на фиг.2 - схема захватного устройства; на фиг.З - разрез А-А на фиг.2; на фиг.4 - раз рез Б-Б на фиг.З; на фиг.5 - вид Б на фиг.З.
Захватное устройство содержит криволинейные поворотные стержни 1, установленные на корпусе 2 посредст- вом шарниров 3, и снабжено приводом поворота стержней 1 (не показан). На противоположных концах стержней 1 установлены вращаюш,иеся барабаны 4 натяжения гибкой ленты 5, которая выполнена с прорезью, расположенной с одного конца до середины, для обеспечения возможности образования петли при обхвате заготовки.
Все три барабана 4 натяжения гиб- кой ленты одинаковы и могут быть выполнены, например, как показано на фиг.З и 4. На захватном стержне 1 неподвижно закреплена ось 6, вокруг которой может вращаться барабан 4, фиксируемый от осевого перемещения винтом 7 и шайбой 8. На барабан 4 навивается некоторый запас гибкой ленты 5, закрепляемой на нем с помощью фигурного отверстия 9 и штифта 10 (фиг.5) . Непосредственно натяжение гибкой ленты 5 осуществляется по воздействием пружины 11 кручения, один конец которой жестко закреплен на стержне 1 посредством штифта 12, а другой - на ступице барабана 4 посредством фигурного отверстия и штифта 13.
Середина гибкой ленты 5 связана с тягой 14, перемещающейся в направ- ляющих 15 корпуса 2 и подпружиненной относительно него пружиной 16. Тяга 14 предназначена для предохранения заготовки 17 от смещений при захватывании и опрокидывания при переносе
Датчиками 18,например,магнитоупру гими,расположенными на стержнях 1, осуществляется контроль усилия натяжения гибкой ленты 5.
Барабаны 4 снабжены тормозными устройствами 19, осуществляющими фиксацию длин гибкой ленты 5.
Устройство работает следующим образом.
Б исходном состоянии дугообразные стержни 1 разведены, тормозные устройства 19 барабанов 4 отключены. Для захвата заготовки 17 устройство подается к ней (по стрелке К) , стержни 1 под действием привода поворачиваются навстречу друг другу (по стрелкам т), изгибая гибкую ленту 5 до образования петли. При этом подпружиненная тяга 14 координирует положение заготовки 17 по продольной оси симметрии устройства. После достижения обхвата заготовки 17 устройство автоматического управления манипулятором (не показано) включает тормозные устройства 19, которые прекращают сматывание гибкой ленты 5 с барабанов 4, и при дальнейшем движении стержней 1 происходит затягивание петли гибкой ленты 5 до требуемого усилия захвата, контролируемого датчиками 18 усилия натяжения гибкой ленты 5.
Положение устройства, соответствующее захваченной заготовке 17, на фиг. показано штрихпунктиром.
Для разжатия заготовки 17 стержни 1 разводятся, тормозные устройства 19 отключаются и гибкая лента 5 сматывается на барабаны 4 под действием пружины 11.
Формула изобретения
1.Захватное устройство, содержащее корпус, тягу, установленную в нем с возможностью линейного перемещения, один конец которой соединен с серединой зажимной гибкой ленты, о т л и ч а ю щ €1 е с я тем, что, с целью расширения технологических возможностей и повышения надежности, оно снабжено при1юдными поворотными криволинейными стержнями, симметрично расположенными относительно тяги, причем на рабочих концах упомянутых рычагов установлены барабаны натяжения гибкой ленты, и расположенными на упомянутых стержнях датчиками контроля усилия натяжения гибкой ленты, а тяга подпружинена относительно корпуса.
2. Устройство по п.1, о т л и - чающееся тем, что на одном конце гибкой ленты выполнена прорезь, в которую может свободно входить другой конец ленты.I
3. Устройство по п.1, о т л и - чающееся тем, что барабаны натяжения гибкой ленты снабжены тормозными устройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАТНОГО ВТЯГИВАНИЯ ЛЯМКИ РЕМНЯ БЕЗОПАСНОСТИ | 1999 |
|
RU2177813C2 |
| Устройство для формированияиздЕлий "МюзлЕ | 1977 |
|
SU816637A1 |
| Система парашютов для клетей подъемников | 1938 |
|
SU54409A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДРАПИРОВАНИЯ | 2010 |
|
RU2543174C2 |
| Вираж беговой дорожки зала | 1990 |
|
SU1726706A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2404108C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2008 |
|
RU2366602C1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Устройство для намотки электрических катушек | 1981 |
|
SU1046787A2 |
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов. Цель - расширение технологических возможностей и повышение надежности за счет расширения диапазона размеров захватываемых заготовок, увеличения поверхности охвата заготовок, обеспечения контроля усилия захвата. Гибкая лента 5, имеюш;ая прорезь, при захватывании детали изгибается приводными криволинейными стержнями 1, образовывая петлю. После чего включается тормозное устройство 19, прекраш,аю- щее сматывание гибкой ленты 5 с барабанов 4, и при дальнейшем движении стержней 1 происходит затягивание петли до требуемого усилия захвата, контролируемого датчиками 18 усилия натяжения гибкой ленты 5. 2 з.п. ф-лы, 5 ил. 1 Фиг1 (Л со со СЛ 4; СЛ to 5
Фиг. 2
5
6 /J
/
сриг.з
//
f
иг.
Вид В
5
Редактор Б.Петраш
Составитель Т.Пинчук Техред Л.Олийнык
Заказ 4010/16 тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
иг.5
Корректор С.Шекмар
| Захват промышленного робота | 1975 |
|
SU571369A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Захватное устройство | 1978 |
|
SU785028A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
