Ъ-1
4; со оо 4;:
О5
ьо
W3
Изобретение относится к машинострое- iiuK) ii предназначено для использования н промышленных роботах, применяемых ., выполнения подъемно-транспортных ра- :,;i, монтажно-сборочных и технологических ; iiopauHii, а также к дистгнцнонных манк- л ;., I «торах.
Цельно изобретения являетс-я расширение технологических возможносте за счет изменения пространственной конфигурации механической руки.
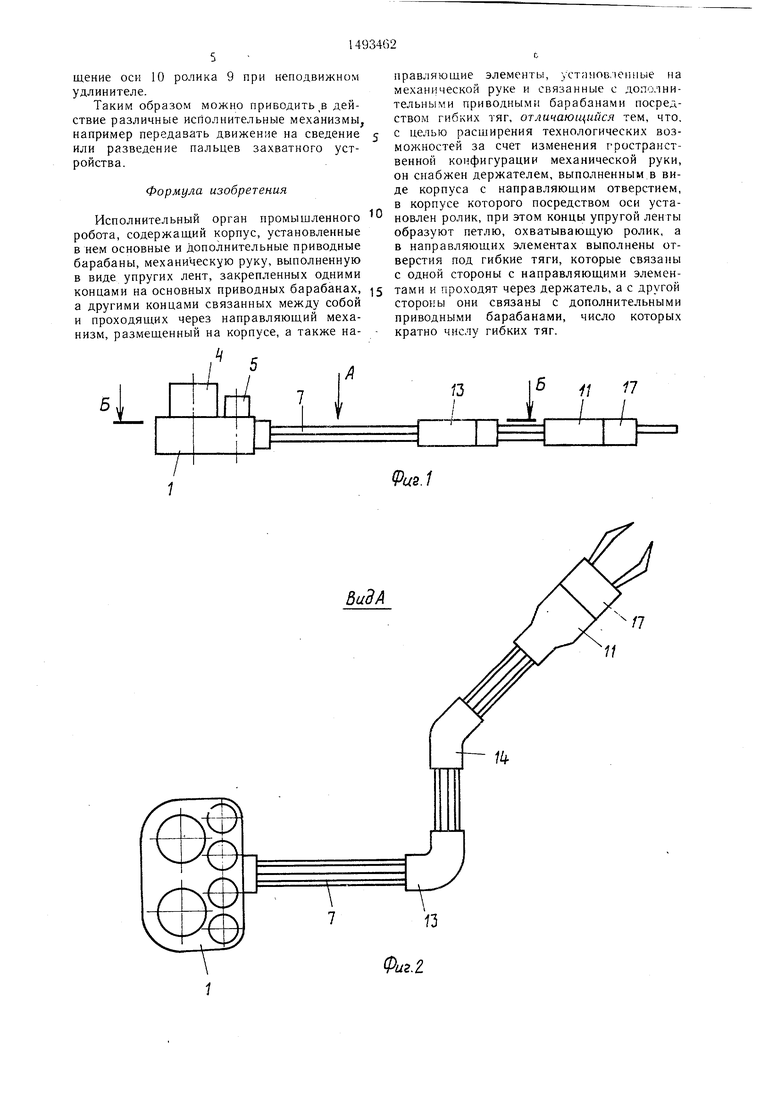
На фиг. 1 изображен исполнительный орган промышленного робота, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - то же. исполнительный орган в сложенном виде; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - сечение В-В на фиг. 4.
Исполнительный орган промьп11лен ого робота содержит корнус 1, звутри которого размещены основные барабаны 2 и дополнительные барабаны 3, связаннь5е с приводами 4 и 5, например элер;тродвигателями. На основных барабанах 2 закреплены упругие стальные ленты 6, образующие механическую руку (удлинитель) 7, другие концы этих .пент связаны между собой и образуют
10
20
сика) 15 не остановят свое вращение посредством тормозов в приводах 5, определяя длину вылета удлинителя 7 в этом направлении. После того, как направляющий элемент (колено) 13 перестанет двигаться, начинается движение удлинителя 7 сквозь направляющий элемент (колено) 13 через направляющее отверстие, при этом направляющий элемент (колено) 14 и держатель 11 двигаются вместе с ним, а гибкая тяга (тросик) 16 свободно разматывается, проходя через отверстия в направляющем элементе (колене) 13 и держателе П. Это движение совершается до тех пор, пока дополнительные барабаны 3 с закрепленными концами гибкой тяги (тросика) 16 не остановят свое вращение, определяя длину вылета удлинителя 7 в этом направлении. После того, как направляющий элемент (колено) 14 перестанет двигаться, начинает двигаться удлинитель 7 сквозь направляющий элемент (колено) 14 через, направляющее отверстие, неся на себе держатель 11 со схватом 17. Это движение происходит до достижения схватом 17 требуемой координаты, затем прекращается вращение основных барабанов 2.
в месте прогиба петлю 8. Пе гля 8 охватывает Схват 17 захватывает заготовку. Один из
ролик 9, врагиающийся на оси 10 в корпусе держателя 11. Удлинитель 7 проходит сквозь направляющий механизм 12, установленный на корпусе 1, и направляющие элементы (колена) 13 и 14, которые изгибают его. Направляющий элемент 13 связан с гибкой тягой (тросиком) 15, проходящей через держатель 11, концы которой связаны с парой дополнительных барабаное; 3 с возможностью наматывания на них или сматывания. Направляющий элемент 14 С15язан с гибкой тягой (тросиком) 16, проходящей через держатель 11 и направляющий элемент 13, концы которой связаны с ,pyгoй парой дополнительных барабанов 3 с возможностью наматывания на них или сматывания. На держателе 11 установлен схзат 17, напри 1ер, с электромагнитным прйвохюм.
Исполнительный орган промышленного робота работает следующим образом.
В исходном состоянии упругая стальная лента 6 намотана на основные барабаны 2, при этом направляющий механизм 12, направляющие элементы 13 h 14 и держатель 11 располагаются вплотную друг к другу. Гибкие тяги (тросики) 15 и 16 намотаны на дополнительные барабаны 3. При вращении основных барабанов 2 от приводов 4 упругая стальная лента 6 с у атывается и выталкивается из корпуса 1 ерез направляющий механизм 12, образуя удлинитель 7 и в месте сгиба петлю 8. Удлинитель 7 выдвигается, при этом направляющ.ие элементы 13 и 14 и держатель П располагаются вплотную друг к другу и выдвигаются вместе с удлинителем. Это движение происходит до тех пор, пока дополнительные барабаны 3 с закрепленными концами 1и5кой тяги (тро30
35
40
45
50
55
ocjiOBHbix барабанов 2 начинает наматывать упругую стальную ленту 6, при этом другой основной барабан 2 не вращается, гибкие тяги (тросики) 15 и 16 также наматываются каждый на один дополнительный барабан 3 при неподвижных других, т. е. начинается сокращение удлинителя на участке от на- правляюш.его элемента (колена) 14 до держателя 11 с их сближением и смыканием. Далее гибкая тяга (тросик) 16, связанная с направляющим элементом (коленом) 14, начинает наматываться на оба дополнительных барабана 3, т. е. начинает сокращаться удлинитель на участке от направляющего элемента (колена) 13 до направляющего элемента 14 с их сближением и смыканием. Затем начинает наматываться гибкая тяга (тросик) 15 на оба соответствующих дополнительных барабана 3, в результате уменьшается длина удлинителя на участке от на- правляюш.его механизма 12 до направляющего элемента (колена) 13 с их сближением н смыканием.
Исполнительный орган принимает исходное состояние. После этого упругая стальная лента 6 перематывается на основных барабанах 2 с целью равномерного распределения по этим барабанам, при этом упругая стальная лента 6 проходит через все направляющие элементы и держатель.
Изменив величины сматывания гибких тяг (тросиков) 15 и 16 с дополнительных барабанов 3, определяют координаты, куда необходимо доставить заготовку.
При выдвинутом удлинителе 7 и одновременном наматывании на один из основных барабанов 2 и сматывании на другой упругой стальной ленты 6 происходит вра
0
сика) 15 не остановят свое вращение посредством тормозов в приводах 5, определяя длину вылета удлинителя 7 в этом направлении. После того, как направляющий элемент (колено) 13 перестанет двигаться, начинается движение удлинителя 7 сквозь направляющий элемент (колено) 13 через направляющее отверстие, при этом направляющий элемент (колено) 14 и держатель 11 двигаются вместе с ним, а гибкая тяга (тросик) 16 свободно разматывается, проходя через отверстия в направляющем элементе (колене) 13 и держателе П. Это движение совершается до тех пор, пока дополнительные барабаны 3 с закрепленными концами гибкой тяги (тросика) 16 не остановят свое вращение, определяя длину вылета удлинителя 7 в этом направлении. После того, как направляющий элемент (колено) 14 перестанет двигаться, начинает двигаться удлинитель 7 сквозь направляющий элемент (колено) 14 через, направляющее отверстие, неся на себе держатель 11 со схватом 17. Это движение происходит до достижения схватом 17 требуемой координаты, затем прекращается вращение основных барабанов 2.
з Схват 17 захватывает заготовку. Один из
з Схват 17 захватывает заготовку. Один из
0
5
0
5
0
5
ocjiOBHbix барабанов 2 начинает наматывать упругую стальную ленту 6, при этом другой основной барабан 2 не вращается, гибкие тяги (тросики) 15 и 16 также наматываются каждый на один дополнительный барабан 3 при неподвижных других, т. е. начинается сокращение удлинителя на участке от на- правляюш.его элемента (колена) 14 до держателя 11 с их сближением и смыканием. Далее гибкая тяга (тросик) 16, связанная с направляющим элементом (коленом) 14, начинает наматываться на оба дополнительных барабана 3, т. е. начинает сокращаться удлинитель на участке от направляющего элемента (колена) 13 до направляющего элемента 14 с их сближением и смыканием. Затем начинает наматываться гибкая тяга (тросик) 15 на оба соответствующих дополнительных барабана 3, в результате уменьшается длина удлинителя на участке от на- правляюш.его механизма 12 до направляющего элемента (колена) 13 с их сближением н смыканием.
Исполнительный орган принимает исходное состояние. После этого упругая стальная лента 6 перематывается на основных барабанах 2 с целью равномерного распределения по этим барабанам, при этом упругая стальная лента 6 проходит через все направляющие элементы и держатель.
Изменив величины сматывания гибких тяг (тросиков) 15 и 16 с дополнительных барабанов 3, определяют координаты, куда необходимо доставить заготовку.
При выдвинутом удлинителе 7 и одновременном наматывании на один из основных барабанов 2 и сматывании на другой упругой стальной ленты 6 происходит вращение оси 10 ролика 9 при неподвижном удлинителе.
Таким образом можно приводить в действие различные исполнительные меха низмы, например передавать движение на сведение или разведенке пальцев захватного устройства.
Формула изобретения
Исполнительный орган промышленного робота, содержащий корпус, установленные в нем основные и дополнительные приводные барабаны, механическую руку, выполненную в виде упругих лент, закрепленных одними
10
правляющие элементы, установ, 1ениые на механической руке и связанные с дополнительными приводными барабанами посредством гибких тяг, отличающийся тем, что. с целью расширения технологических возможностей за счет изменения гространст- венной конфигурации механической руки, он снабжен держателем, выполненным в виде корпуса с направляющим отверстием, в корпусе которого посредством оси установлен ролик, при этом концы упругой ленты образуют петлю, охватывающую ролик, а в направляющих элементах выполнены отверстия под гибкие тяги, которые связаны с одной стороны с направляющими элеменконцами на основных приводных барабанах, 5 тами и проходят через держатель, а с другой
а другими концами связанных между собой и проходящих через направляющий механизм, размещенный на корпусе, а также на ,.
стороны они связаны с дополнительными приводными барабанами, число которых кратно числу гибких тяг.
0
правляющие элементы, установ, 1ениые на механической руке и связанные с дополнительными приводными барабанами посредством гибких тяг, отличающийся тем, что. с целью расширения технологических возможностей за счет изменения гространст- венной конфигурации механической руки, он снабжен держателем, выполненным в виде корпуса с направляющим отверстием, в корпусе которого посредством оси установлен ролик, при этом концы упругой ленты образуют петлю, охватывающую ролик, а в направляющих элементах выполнены отверстия под гибкие тяги, которые связаны с одной стороны с направляющими элемен5 тами и проходят через держатель, а с другой
стороны они связаны с дополнительными приводными барабанами, число которых кратно числу гибких тяг.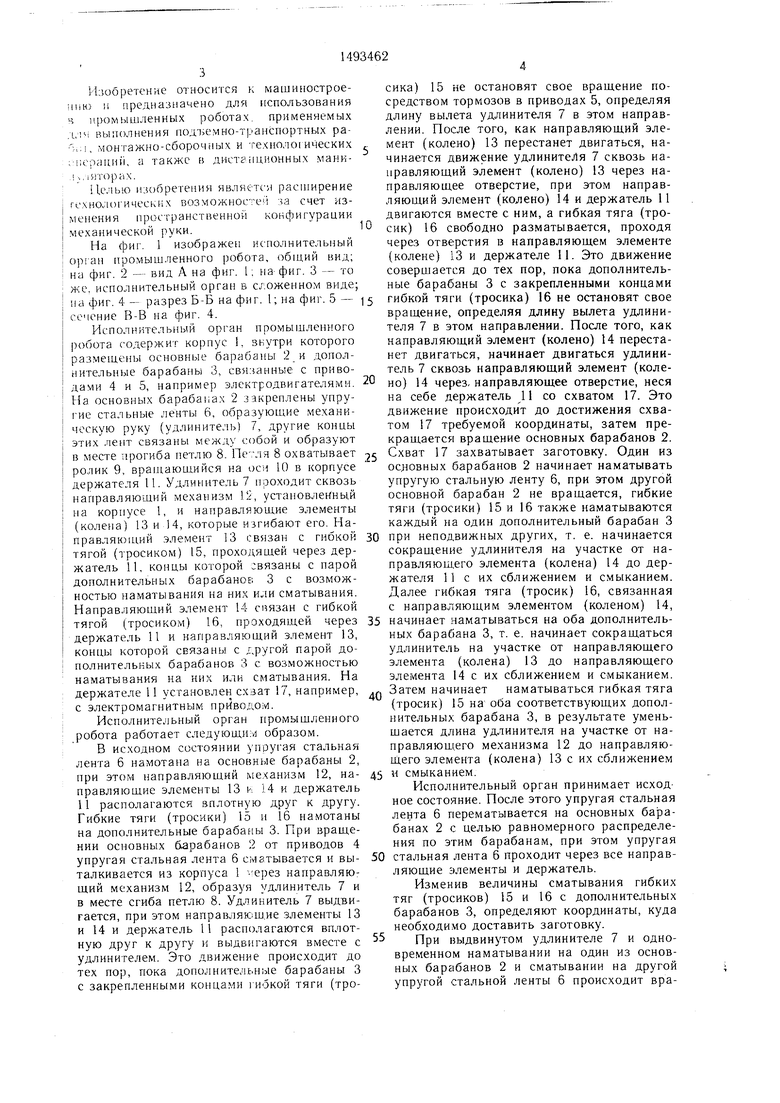
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530441A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1504095A1 |
| Установка для автоматической сварки в труднодоступных местах | 1980 |
|
SU941123A1 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| ПРИВОД КАБЕЛЬНОГО БАРАБАНА ГРУЗОПОДЪЕМНОГО КРАНА | 1973 |
|
SU407827A1 |
| Устройство для транспортировки барабанов с длинномерным материалом | 1980 |
|
SU977341A2 |

Изобретение относится к машиностроению и предназначено для использования в промышленных работах, применяемых для выполнения подъемно-транспортных работ, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах. Целью изобретения является расширение технологических возможностей за счет изменения пространственной конфигурации механической руки. Для этого упругая стальная лента 6 в месте перегиба образует петлю 8. Петля 8 охватывает ролик 9, вращающийся на оси 10 в корпусе держателя 11. Удлинитель 7 проходит сквозь направляющий механизм 12, установленный на корпусе 1, и направляющие элементы (колена) 13,14, которые изгибают его. Направляющий элемент 13 связан с гибкой тягой (тросиком) 15, проходящей через держатель 11, концы которой связаны с парой дополнительных барабанов 3 с возможностью наматывания на них или сматывания. Направляющий элемент 14 связан с гибкой тягой 16, проходящей через держатель 11 и направляющий элемент 13, концы которой связаны с другой парой дополнительных барабанов 3 с возможностью наматывания на них или сматывания. 5 ил.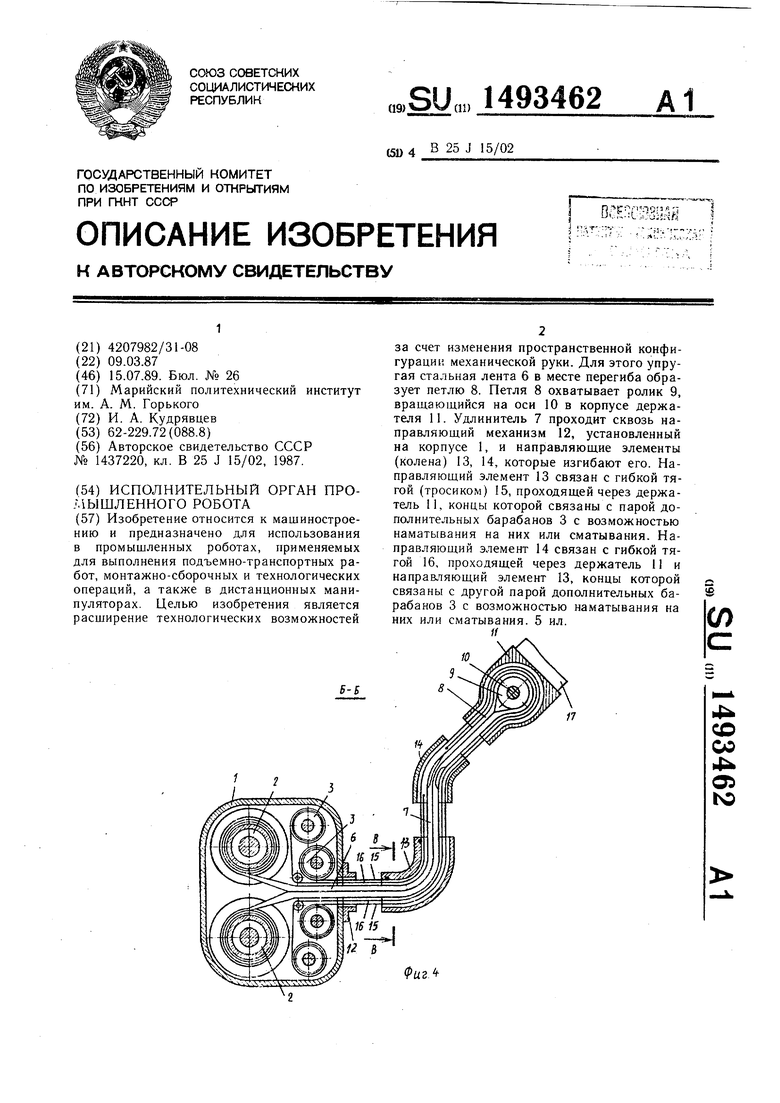
ВидА
/7
//
и
дидА
11
11
f3
Фиг. 5
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
