Изобретение относится к подъемно- транспортным устройствам, а именно к захватным устройствам промышленных роботов и манипуляторов.
Цель и;зобрстения - расширение технологических возможностей за счет увеличения диапазона размеров захватываемых заготовок.
На фиг. 1 схематически изображен схват манипулятора в свободном состоянии, общий вид; на фиг. 2 - то же, при захвате заготовки; на фиг.З разрез А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 1.
Схват манипулятора содержит корпус 1, имеющий опорную поверхность 2, и упругие зажимные губки, выполненные в виде пластин 3 Г-образной формы и зшеньев 4, установленных на пластинах 3 неподвижно в два ряда. Трос 5 трособлочной системы своими концами лсестко связан со свободными концами 6 пластин 3, а средней частью огибает блоки 7, оси 8 которых поср«;дством кронштейнов 9 закреплены между рядами звеньев 4 в средней части пластины 3, и проходит через щели 10 в опорной поверхности 2 внутрь корпуса 1, где трос 5 огибает основной блок 11,ось 12 которого через кронштейн 13 жестко соединена с выходным звеном 14 силового при1зода поступательного перемещения, и образует две симметричные ветви. В корпусе имеется направляющая , выполненная, например, в виде двух 15 квадратного сечения, жестко закрепленных на корпусе 1 посредством перегородок 16 перпен дикулярн1э оси схвата.
Схват манипулятора снабжен по числу зал:имных губок ползунно-рычаж- ными механизмами, каждьА из которых содержит двуплечий рычаг 17, тягу 18 и ползун 19.
Пластины 3 через щели 20 жестко соединен) соответственно внутри корпуса 1 с ползунами 19, размещенными на направляющих 15.
Двуплечий рычаг 17 вращается от- носителыо неподвижной оси 21, жестко соединенной с корпусом 1. Двуплечий рычаг 17 соединен с осью 21 посредством двух шайб 22 и 23, закрепленных на оси 21,На одном плече двуплечего рычага 17 имеется паз 24, в котором размещен палец 25 ползуна 19, а другое плечо двуплечего рычаг
5
17 с помощью оси 26 шарнирно соединено с концом тяги 18, противополож- конец которой шарнирно соединен с крони тейном 27 выходного звена 14 посредством оси 28.
Схват манипулятора работает следующим образом.
При нахождении вь ходного звена 14 в крайнем выдвинутом к опорной поверхности 2 положении, соответствующем наименьшему устанбвленному расстоянию между ползунами 19, упругие зажимные губки полностью распрямлены, что достигается выбором необхо0
ДИМОЙ длины троса 5. В этом состоянии схват манипулятора полностью раскрыт.
Для захватывания заготовки 29 (фиг. 2) схват манипулятора ориентируют относительно заготовки 29 так, чтобы она находилась между упругими зажимными губками, затем перемещают выходное звено 14, удаляя его от 5 опорной поверхности 2. При зтом трос 5 натягивается и изгибает пластины 3 в сторону заготовки 29. Одновременно конць тяг 18 приводят двуплечие рычаги 17 во вращение относительно осей 21 по часовой стрелке, и двуплечие рычаги 17 перемещают ползуны 19, удаляя их один от другого.
0
Для освобождения заготовки 29 выходное звено 14 возвращают в крайнее вь двинутое к опорной поверхности 2 положение. При зтом напряжение троса 5 уменьшается, и пласти 1ы 3 распрямляются. Одновременно концы тяг 18 приводят двуплечие рычаги 17 во
вращение относительно осей 21 против часовой, стрелки, и двуплечие рычаги 17 перемещают ползуны 19 к середине опорной поверхности 2.
Для захватывания заготовки, размеры которой близки к расстоянию
между звеньями 4 противоположных упругих губок, достаточно небольшого изгиба пластин 3, а для захвать ва- ния заготовок малых размеров (существенно меньших расстояния между звеньями 4 противоположных упругих губок) необходимо сильно изогнуть пластины 3. Однако при сильном изгибе последних их свободные концы 6 соприкасаются и препятствуют дальнейшему изгибу упругих зажимных губок. Разнесение упругих зажимных губок в разные плоскости нецелесообразно поско:тьку приводит к проворачиванию
3
и выскальзыванию заготовки из схват при числе губок меньше трех. Кроме того, с увеличением изгиба пластин 3 уменьшается угол схвата тросом 5 блоков 7, что затрудняет изгиб пластин 3.
Жесткое соединение пластин 3 с позунами 1У ползунно-рычажных механизмов позволяет при сильном изгибе пластин.3 удалить их одни от другой так, чтобы свободные концы 6 не Соприкасались. При перемещении ползунов 19 одного от другого блоки 7 также удаляются один от другого и от середины опорной поверхности 2, что приводит к увеличению угла охвата тросом 5 блоков 7. Это позволяет неограниченно увеличивать силы, изгибающие пластины 3, и момент силы натяжения троса 5 относительно точек крепления пластин 3 к ползунам 19, а следовательно, в нужных пределах изгибать упругие зажимные губки.
Формула изобретения
Схват манипулятора, содержащий корпус с направляющей, установленные на нем упругие зажимные губки, выполненные в виде Г-образных пластин с
0
5
5
о
0
закрепленными на них в два ряда зве-, ньями, силовой привод поступательного перемещения и трособлочную систему, основной блок которой установлен на выходном звене силового привода, причем трос своими концами жестко связан со свободными концами Г-образных пластин, а средней частью этот трос огибает блоки, закрепленные между рядами звеньев в средней части Г-образных пластин, и основной блок, образуя две симметричные ветви, а направляющая закреплена перпендикулярно оси схвата, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения диапазона размеров захватываемых деталей, он снабжен по числу зажимных губок ползунно- рычажными механизмами, каждый из которых включает двуплечий рычаг, тягу и ползун, на котором закреплена Г-образная пластина, при этом ползун размещен в направляющей, а двуплечий рычаг шарнирно установлен на корпусе, причем на одном его плече имеется паз под палец ползуна, а другое его плечо шарнирно связано с тягой, противоположный конец которой также шарнирно связан с выходным звеном силового привода.

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1214410A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Схват манипулятора | 1983 |
|
SU1166988A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |

Изобретение относится к подъемно-транспортным устройствам, а именно к захватным устройствам промышленных роботов и манипуляторов. Целью изобретения является расширение технологических возможностей за счет увеличения диапазона размеров захватываемых заготовок. Для этого каждая зажимная губка имеет ползунно- рычажные механизмы, каждый из котогз б рых включает двуплечий рычаг 17, тягу 18 и ползун 19. Пластины 3 через щели 20 соединены соответственно внутри корпуса 1 с ползунами 19, размещенными на направляющих 15. Такое соединение пластин 3 с ползунами 19 ползунно-рычажн механизмов позволяет при сильном изгибе пластин 3 удалять их друг от друга так, чтобы свободные контда не соприкасались. При этом блоки 7 также удаляются друг от друга и от середины опорной поверхности 2, что приводит к увеличению угла охвата тросом 5 блоков 7. Это позволяет неограниченно увеличивать силы, изгибающие пластины 3, и момент силы натяжения троса 5 относительно точек крепления пластин 3 к ползунам 1-9, а следовательно, в нужных пределах изгибать упругие зажимные губки. 4 ил. f (Л 18 f9 20 со 4 ьо со о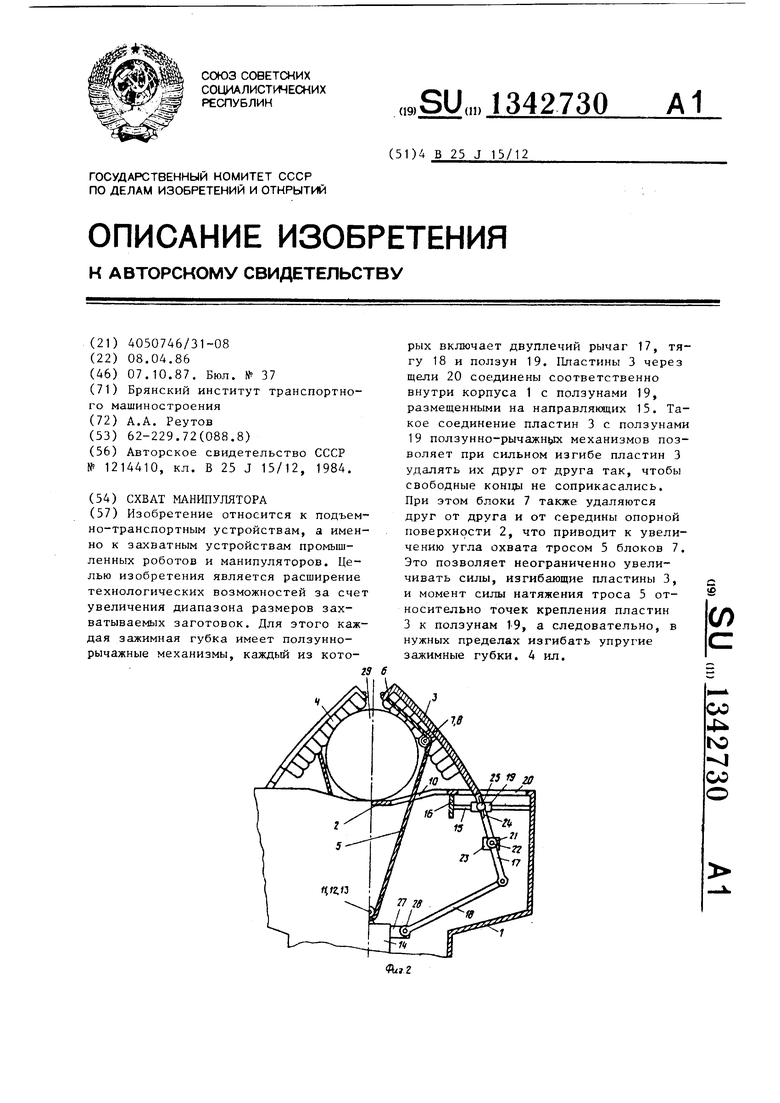
2025 Iff 15
Фи2.1
V 7.
в фие. Ц-
Редактор И. Горная
Составитель И. Бакулина
Техред М.Ходанич Корректор Л. Пилипенко
Заказ 4586/15Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/3
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Схват манипулятора | 1984 |
|
SU1214410A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
