(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор портального типа | 1985 |
|
SU1310199A1 |
| Манипулятор | 1989 |
|
SU1685701A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2381099C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ДВИЖУЩЕГОСЯ ПРОКАТА | 1999 |
|
RU2166413C2 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| РУЧНАЯ БОРТОВАЯ ТАЛЬ | 1991 |
|
RU2016836C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Манипулятор портального типа | 1987 |
|
SU1521578A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2000 |
|
RU2165277C1 |
| Автоматический манипулятор | 1981 |
|
SU963846A1 |
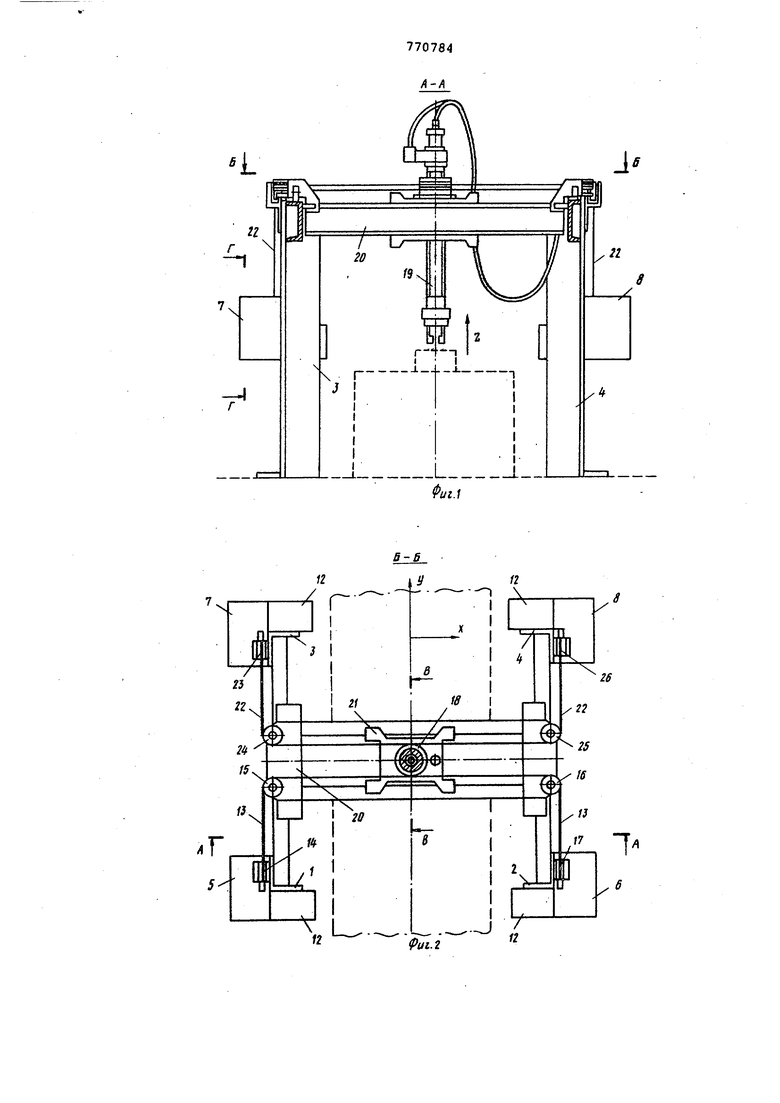
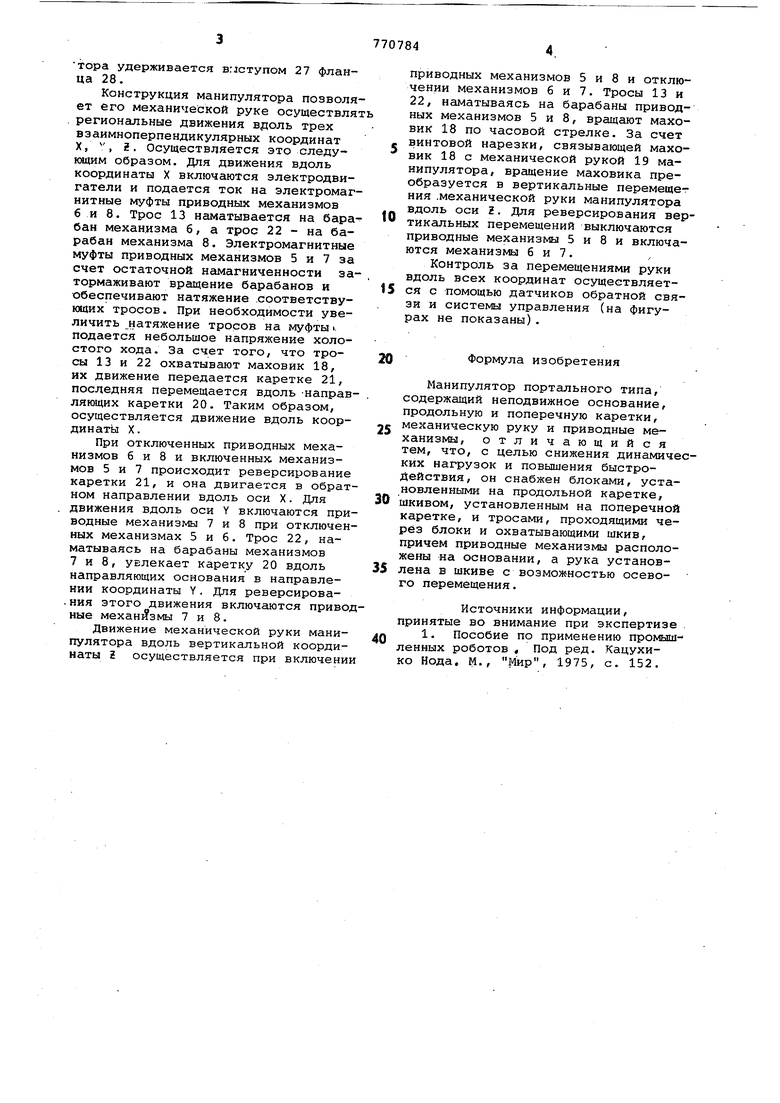
Изобретение относится к средствам автоматизации производства, а именно к манипуляторам и промышленным роботам, и может быть использовано в быстропереналаживаемых автоматических линиях. Известны манипуляторы портального типа, содержащие неподвижное основание, продольную и поперечную каретки, механическую руку и привод ные механизмы Ll. Однако у таких манипуляторов при водные механизмы расположены на под вижных звеньях, что увеличивает динамические нагрузки и снижает быстр действие. Цель изобретения - снижение дина мических нагрузок и повыиение быстр действия манипулятора. Для достижения цели манипулятор снабжен блоками, установленными на продольной каретке, шкивом, установ ленным на п перечной каретке, и тро сами, проходящими через блоки и охватывающими шкив, причем приводные механизмы расположены на основании а рука установлена в шкиве с возможностью осевого перемещения. На фиг. 1 показан манипулятор (сечение А-А на фиг. 2); на фиг. 2 сечение Б-Б на фиг. 1; на фиг. 3 механизм вертикальных перемещений руки манипулятора (сечение B-D на фиг. 2) ; на фиг. .4 - устройство приводного механизма (сечение Г-Г на фиг. 1). На неподвижном основании манипулятора, имеющем опоры 1-4, установлены приводные механизмы 5-8, состоящие из барабана 9, электромагнитной муфты 10, червячной передачи 11 и электродвигателя 12. Трос 13, одним концом намотанный и закрепленный на барабане приводного механизма 5,.проходит через блоки 14-17, охватывает приводной маховик 18 механизма вертика -тьмых перемещений механической г уки 19 манипулятора,. Другим концом трос 13 намотан и закреплен на барабане приводного механизма 6. Блоки 15 и 16 установлены на подвижной продольной каретке 20, а маховик 18 - на поперечной каретке 21. Тросе 22 соединяет приводные механизмы 7 и 8, проходя через блоки 23-26 и охватывает маховик 18. Блоки 24 и 25 установлены на каретке 20. Маховик 18 связан с рукой 19 манипулятора винтовой нарезкой. От проворота рука манипулятора удерживается вглступом 27 фланца 28.
Конструкция манипулятора позволяет его механической руке осуществлят региональные движения вдоль трех вэаимноперпендикулярных координат X, , 2. Осуществляется это следующим образом. Для движения вдоль координаты X включаются электродвигатели и подается ток на электромагнитные муфты приводных механизмов 6 и 8. Трос 13 наматывается на бара бан механизма б, а трос 22 - на барабан механизма 8. Электромагнитные муфты приводных механизмов 5 и 7 за счет остаточной Не1магниченности затормаживают вргвдение барабанов и обеспечивают натяжение .соответствуюцих тросов. При необходимости увеличить натяжение тросов на муфты подается небольшое напряжение холостого хода. За счет того, что тросы 13 и 22 охватывают маховик 18, их движение передается каретке 21, последняя перемещается вдоль -направляющих каретки 20. Таким образом, осуществляется движение вдоль координаты X.
При отключенных приводных механизмов б и 8 и включенных механизмов 5 и 7 происходит реверсирование каретки 21, и она двигается в обратном направлении вдоль оси X. Для движения вдоль оси Y включаются приводные механизмы 7 и 8 при отключенных механизмах 5 и 6. Трос 22, наматываясь на барабаны механизмов 7 и 8, увлекает каретку 20 вдоль направляющих основания в направлении координаты Y. Для реверсирова.ния этого движения включаются привоные механ1 змы 7 и 8.
Движение механической руки манипулятора вдоль вертикальной координаты Z осуществляется при включени
приводных механизмов 5 и 8 и отключении механизмов б и 7. Тросы 13 и 22, наматываясь на барабаны приводных механизмов 5 и 8, вращают маховик 18 по часовой стрелке. За счет винтовой нарезки, связывающей маховик 18 с механической рукой 19 манипулятора, вращение маховика преобразуется в вертикальные перемещения .механической руки манипулятора вдоль оси Н. Для реверсирования вертикальных перемещений выключаются приводные механизмы 5 и 8 и включаются механизмы б и 7.
Контроль за перемещениями руки вдоль всех координат осуществляется с помощью датчиков обратной связи и системы управления (на фигурах не показаны).
Формула изобретения
Манипулятор портального типа, содержащий неподвижное основание, продольную и поперечную каретки, механическую руку и приводные механизмы, отличающийся тем, что, с целью снижения динамичеких нагрузок и повышения быстродействия, он снабжен блоками, установленными на продольной каретке, шкивом, установленным на поперечной каретке, и тросами, проходящими через блоки и охватывающими шкив, причем приводные механизмы расположены на основании, а рука установлена в шкиве с возможностью осевого перемещения.
Источники информации, принятые во внимание при экспертизе
г
5
