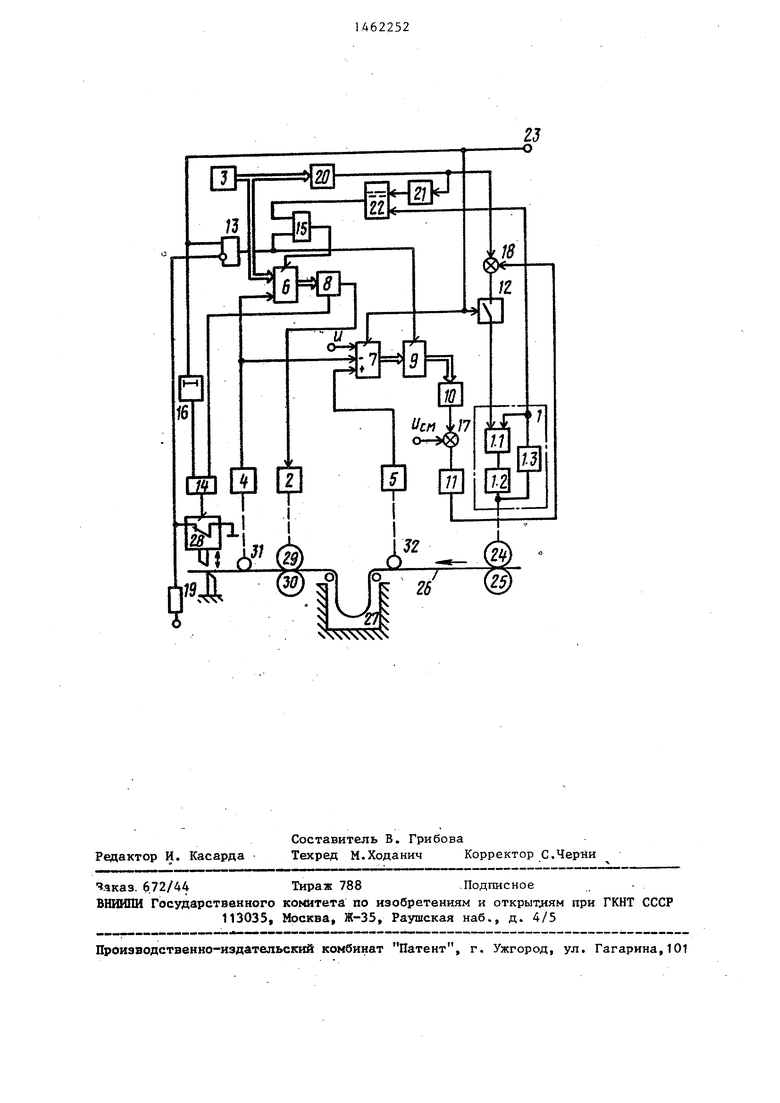
ный каскад 1.1, электродвигат&пь 1.2 и тахогенератор 1.3 обратной связи по частоте вращения, электропривод 2 валковой подачи, задатчик 3 перемещения, датчик 4 перемещения, установленный на выходе валковой подачи, датчик 5 перемещения, установленный на выходе правильного агрегата, первьм и второй реверсивные счетчики 6 и 7, командный блок 8, нереверсив- ый счетчик 9, цифроаналоговый преобразователь 10, усилитель 11, клю- чевой блок 12, первый элемент И 13, второй элемент И 14, третий элемент И 15, элемент 16 задержки, узел 17 сравнения, узел 18 суммирования, резистор 19, блок 20 предварительного определения частоты вращения электропривода правильного агрегата, блок 21 деления и компаратор 22. Кроме того, позицией 23 обозначен вход
. устройства, на которьй подается сигнал Пуск. Валки 24 и 25 правильного агрегата осуществляют правку и подачу материала 26 в петлевой ком; пенсатор 27, а исполнительный орган 28 обрабатывающей мащины по команде с командного блока 8 осуществляют обработку (резку) подаваемого валками 29 и 30 материала 26. Датчики 4 и 5 перемещения работают соответственно от мерительньк роликов 31 и 32.. .
Первый выход командного блока 8 подключен на вход электропривода 2 валковой подачи. Входы командного блока 8 соединены с соответствующими выходами первого реверсивного счетвателя 10 соединены с выходами нер версивного счетчика 9, информацион ные входы которого подключены к вы ходам второго реверсивного счетчик 7. Вычитающий вход по1:шеднего подк чен к выходу первого датчика 4 пер мещения, суммирующий вход - к выхо второго датчика 5 перемещения, а и
10 формационный вход старщего разряда подключен к источнику логической е ницы .
Входы блока 20 предварительного определения частоты вращения элект
15 привода правильного агрегата подкл чены к выходу задатчика 3 перемеще ния. Входы предварительной записи второго реверсивного счетчика 7 и управляющий вход ключевого блока 1
20 соединены с входом 23 устройства. Вход предварительной записи нереве сивного счетчика 9 соединен и выхо дом первого элемента И 13, инверсн вход которого прдключен через рези
25 тор 19 к источнику логической един цы, а через размыкающий контакт ко нечного выключателя исполнительног органа .28 обрабатывающей машины - нулевому полюсу источника питания.
ЗС
Прямой вход первогсз элемента И подключен к входу 23 устройства и через элемент 16 задерж1си - к перв му входу второго элемента И 14, вт
25 рой вход которого соединен с вторым выходом командного блока 8. Выход второго элемента И 14 соединен с входом исполнительного органа 28 обрабатывающей машины,, Выход третьй
чика 6, информационные входы которого 40 го элемента И 15 соединен с входом соединены с задатчиком 3 перемещения, предварительной записи первого ре- а счетный вычитающий вход - с первого датчика 4 перемещения
выходом , Выход узла 18 суммирования подключен через ключевой блок 12 к входу электропривода 1.правильного агрегата.
Первьй вход узла 18 суммирования соеI . . . .
динен с выходом блока 20 предварительного определения частоты вращения электропривода правильного агрегата, а второй вход - с выходом усилителя 11.
Вход усилителя 11 подключен к вь1ходу узла 17 сравнения, первьй вход которого соединен с источником напря- жения смещения, а второй с выходами цифроаналогового преобразователя 10. Входы цифроаналогового преобразоверсивного счетчика 6 Первый вход соединен с выходом первого элемента И 13, второй - с вь одом компаратор 45 22, первый вход которого соединен с выходом блока 21 деления, а второй с выходом тахогенератора 1.3 обрат- иой связи по частоте вращения элект ропривода правильного агрегата. Вхо блока 21 деления соединен с выходом блока 20 предварительного определения частоты вращения электропривода правильного агрегата.
Блок 21 деления предназначен для уменьшения в два раза аналогового сигнала, вырабатьшаемого блоком 2, предварительного определения частоты вращения электропр1шода правильного агрегата. Компаратор 22 преднй
50
55
вателя 10 соединены с выходами нереверсивного счетчика 9, информационные входы которого подключены к выходам второго реверсивного счетчика 7. Вычитающий вход по1:шеднего подключен к выходу первого датчика 4 перемещения, суммирующий вход - к выходу второго датчика 5 перемещения, а информационный вход старщего разряда подключен к источнику логической единицы .
Входы блока 20 предварительного определения частоты вращения электропривода правильного агрегата подключены к выходу задатчика 3 перемещения. Входы предварительной записи второго реверсивного счетчика 7 и управляющий вход ключевого блока 12
соединены с входом 23 устройства. Вход предварительной записи нереверсивного счетчика 9 соединен и выходом первого элемента И 13, инверсный вход которого прдключен через резистор 19 к источнику логической единицы, а через размыкающий контакт конечного выключателя исполнительного , органа .28 обрабатывающей машины - к нулевому полюсу источника питания.
Прямой вход первогсз элемента И 13 подключен к входу 23 устройства и через элемент 16 задерж1си - к первому входу второго элемента И 14, второй вход которого соединен с вторым выходом командного блока 8. Выход второго элемента И 14 соединен с входом исполнительного органа 28 обрабатывающей машины,, Выход третьй40 го элемента И 15 соединен с входом предварительной записи первого ре-
версивного счетчика 6 Первый вход соединен с выходом первого элемента И 13, второй - с вь одом компаратора 45 22, первый вход которого соединен с выходом блока 21 деления, а второй - с выходом тахогенератора 1.3 обрат- иой связи по частоте вращения электропривода правильного агрегата. Вход блока 21 деления соединен с выходом блока 20 предварительного определения частоты вращения электропривода правильного агрегата.
Блок 21 деления предназначен для уменьшения в два раза аналогового сигнала, вырабатьшаемого блоком 2, предварительного определения частоты вращения электропр1шода правильного агрегата. Компаратор 22 преднй50
55
5 - значен для выработки сигнала логичекой единицы, когда величина напряжения на выходе тахогенератора 1.3 равняется величине напряжения на выходе блока 21 деления. Третий элемент И 15 предназначен для разрешения записи информации в первый реверсивный счетчик 6 только при наличии сигналов логической едини1р 1 на вькоде первого элемента И 13 и на выходе компаратор 22.
Устройство управления перемещение сматываемого с рулона длинномерного материала 1 аботает следуклцим образом
После подачи на вход 23 устройства сигнала Пуск (перепадом ) во второй реверсивный счетчик 7 вводится число, равное половине емкост этого счетчика, которое передним фронтом (перепадом сигнала на выходе первого элемента И 13 переписывается в нереверсивный и счетчик 9, а также открьшается ключевой блок 12 и включается электропривод l правильного агрегата. Последний посредством валков 24 и 25 осуществляет подачу материала 26 в петлевой компенсатор 27 под действием напряжения, формируемого блоком 20 предварительного определения частоты вращения электропривода правильного агрегата.
После разгона электропщвода 1 .правильного агрегата до частоты вращения, в два раза меньшей заданной блоком 20, выходное напряжение тахогенератора 1.3 становится равным выходному напряжению блока 2.1 деления Срабатывает компаратор 22, после чего в первьш реверсивный счетчик. 6 записывается код заданного шага подачи, установленный оператором заранее на задатчике 3 перемещения. Команд ньй блок 8 формирует задающее н пряжение на электропривод.2 валково подачи, который посредством валков 29 и 30 отрабатывает заданное перемещение обрабатьшаемого материала 26 При перемещении материала 26 гфиво.дятся во вращение мерительные ролики 31 и 32, а следовательно, датчики Аи 5 перемещения.
Сигнал от первого датчика 4 пере- ;мещения поступает на счетный вычитающий вход первого реверсивного счетчика 6, уменьшая число, родержа- щееся Е нем, а. также на вычитающий .вход второго реверсивного счетчика
0
5
0
2252
ц
7, на суммирующий вход которого по- дается сигнал от второго датчика 5 перемещения.
После отработки заданной величины подачи командный блок 8 вырабатывает сигнал на срабатывание исполнительного органа 28 обрабатывающей машины.
После срабатывания исполнительного органа 28 обрабатывающей машины, в первый реверсивный счетчик 6 вновь вводится информация с задатчика 3 перемещения, и цикл валковой подачи повторяется. Одновременно в нереверсивный счетчик 9 перепнсьшается информация с второго реверсивного счетчика 7 и при наличии разности измерений длины материала датчиками 4 и 5 формируются корректирующей (на выходе цифроаналогового преобразователя 10) сигнал управления на электропривод 1 правильного агрегата.
Таким образом, основная составляющая корректирующего сигнала, обуслов5 ленная конечным темпом разгона (ускорением) электропривода правильного агрегата, после первого цикла работы не возникает, так как величина материала, выгруженного из петлевого
0 компенсатора, становится близкой к величине материала, загруженного в него под действием сигнала с блока 20, т.е. недодача материала в петлевой компенсатор в6 время разгона
5 электропривода правильной машины компенсируется за счет того, что электропривод валковой подачи в первом цикле работы включается позже электропривода правильного агрегата, а именно в тот момент, когда величина загруженного материала равна величине материала, теряемой при дальнейшем разгоне электропривода правильного агрегата.
Это позволяет не только уменьшить глубину петлевого компенсатора, но и ускорить процесс стабилизации час- тоты вращения электропривода правильного агрегата на уровне средней частоты вращения электропривода валковой подачи за цикл работы и уменьшить тепловые потери электродвигателя правильного агрегата.
0
0
Формула изобретения
Устройство управления перемещением сматываемого с рулона длинномерного материала, содержащее электро
привод правильного агрегата с тахо- генератором, электропривод валковой подачи, задатчик перемещения, первый датчик перемещения, установленный на выходе валковой подачи, второй датчик перемещения, установленный на выходе правильного агрегата, первый и второй реверсивные счетчики, нереверсивный счетчик, цифроаналого- вый преобразователь, усилитель, ключевой блок, первый и второй элементы И, элемент задержки, узел сравнения, узел суммирования, резистор, блок предварительного определения частоты вращения электропривода правильного агрегата и командный блок, первый выход которого подключен на вход электропривода валковой подачи, а вхбды соединены с соответствующими выходами первого реверсивного счетчика, информационные входы которого соединены с задатчиком перемещения, а счетный вычитающий вход - с выходом первого датчика перемещения, выход узла суммирования подключен через ключевой блок к входу электропривода правильного агрегата, первый вход узла суммирования соединен с выходом блока предварительного определения частоты вращения электропривода правильного агрегата, а второй вход - с выходом усилителя, вход которого подключен к выхо ду узла сравнения, первый .вход которого соединен с источником напряжения смещения, а второй - с выходом цифроаналогового преобразователя, входы которого соединены с выходами нереверсивного счетчика, информационные входы которого подклю- чаны к выходам второго реверсивного счетчика, вычитающий вход которого подключен к выходу первого датчика перемещения, суммирующий вход - к выходу второго датчика перемещения, а информационный вход старшего разря
0
t5
0
4о
да подключен к источнику логической единицы, входы блока предварительного определения частоты вращения электропривода правильного агрегата, подключены к задатчику перемещения, входы предварительной записи второго реверсивного счетчика и управляющий вход ключевого блока соединен с входом устройства, а вход предварительной записи нереверсивного счетчика соединен с выходом первого элемента И, инверсный вход которого подключен через резистор к источнику логической единицы, а через размыкающий контакт,конечного выключателя исполнительного органа обрабатывающей машины - к нулевому полюсу источника питания, прямой вход первого элемента И подключен :к входу устройства и через элемент задержки - к первому входу второго элемента И, второй вход которого соединен с вторым выходом кома щного блока, выход второго элемента И соединен с входом исполнительного органа обрабатывающей машины, отличающееся тем, что, с це,т1ью снижения величины петлевого компенсатора за счет сниЗО жения перерегулирования уровня петли материала, устройство снабжено блоком деления, компаратором и третьим элементом И, выход которого соединен с входом предварительной за35 писи первого реверсивного счетчика, первый вход соединен с выходом первого элемента И, второй - с выходом компаратора, первьй вход которого соединен с выходом блока деления, а второй - с выходом тахогенератора электропривода правильного агрегата, причем вход блока деления соединен с выходом блока предварительного определения частоту электропривода правильного агрегата.
25
1уТ1| I
щ А @
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1987 |
|
SU1505623A2 |
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1986 |
|
SU1345171A1 |
| Система автоматического управления непрерывным агрегатом для обработки рулонов | 1988 |
|
SU1639817A1 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
| Электропривод | 1986 |
|
SU1390757A1 |
| Реверсивный вентильный электропривод | 1985 |
|
SU1279040A1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| Устройство для измерения длины и теоретического веса полосы | 1978 |
|
SU739342A1 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 1999 |
|
RU2142193C1 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
Изобретение относится к автоматизации листоштамповочного оборудования, и может быть применено в ав;томатцческих линиях для поперечной резки рулонной стали. Цель изобретения - снижение величины петлевого компенсатора за счет снижения перерегулирования уровня петли материала в конце первого и второго циклов работы. Это осуществляется путем первоначального включения электроприво,1 Изобретение относится к автоматизации листоштамповочного и отрезного оборудования и может быть использовано в системах управления механизмами автоматической линии поперечной резки рулонной стали. Цель изобретения - снижение величины петлевого компенсатора за счет снижения перерегулирования уровня петли материала путем первоначального включения электропривода валковой подачи после достижения частода валковой подачи после достижения частоты вращения электроприводом.правильного агрегата величины, равной половине заданной блоком предварительного определения частоты вращения электропривода правильного агрегата, что.позволяет уменьшить глу- бину петлевого компенсатора и снизить тепловые петери в электроприводе правильного агрегата. Устройство управления содержит электропривод правильного агрегата, включакяций та- хогенератор, электропривод валковой подачи, задатчик перемещения, два датчика перемещения, два реверсивных счетчика, командный блок, нереверсив-i ный счетчик, цифроаналоговый преобразователь, усилитель, ключевой блок, три элемента И, .элемент задержки, узел сравнения, узел суммиррв,ания,, резистор, блок пре;;варительного определения частоты вращения электропривода правильного агрегата, блок деления, компаратор. 1 ил. о той вращения электропривода правильного агрегата величины, равной половине заданной блоком предварительного определения частоты вращения электропривода правильного агрегата. На чертеже представлена блок- схема устройства. Устройство управления перемещением сматьгоаемого с рулона длинномерного материала содержит электропривод 1 правильного агрегата, включающий усилительно-преобразователь(Л с i4 а tN9 tvd СП N9
чхчхчхч х
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1986 |
|
SU1345171A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
