Изобретение относится к автоматике и аналоговой вычислительной технике и предназначено для нолучения сигналов, пропорциональных производной, при наличии шума, уровень и время корреляции которого неизвестны и могут меняться в заданных пределах.
Цель изобретения - повышение точности дифференцирования.
На чертеже приведена схема предлагаемого устройства.
Устройство содержит первый 1, второй 2, четвертый 3, пятый 4, и третий 5 вычитаю- ш,ие элементы, второй 6, первый 7, третий 8 и четвертый 9 сумматоры, первый 10, второй 11, третий 12 интеграторы, второй 13 и первый 14 источники постоянного сигнала, элемент 15 масштабирования, второй 16, третий 17, первый 18 блоки умножения, второй релейный элемент 19, шестой 20, пятый 21, четвертый 22, седьмой 23 блоки умножения, элемент 24 ограничения, первый 25, четвертый 26 и третий 27 релейные элементы.
Устройство работает следуюшим образом.
На первый вход вычитающего элемента 1 поступает смесь полезного сигнала с шумом, которая сравнивается с величиной сигнала на выходе интегратора 11.
В отсутствие шумов в устройстве возникает скользяший режим, при котором на выходе вычитаюш,его элемента 2 близок к нулю.
K(t)x(t) Л С ae(t) W(t), гдех(1) -сигнал на выходе элемента 1;
W(t) - сигнал на выходе интегратора 10;
С - коэффициент, с которым сигнал; W(t) поступает на вход элемента 5
Л С - коэффициент передачи элемента 15;
эе(1) - сигнал с выхода элемента 24 ог- ограничения.
За счет соответствующего выбора коэффициента С, а также весового коэффициента у, с которым суммируются сигналы блоков 22 и 23 умножения в сумматоре 7, можно обеспечить при любом фиксированном значении А С, определяющем устойчивость работы любую требуемую точность отслеживания входного сигнала f(t) интегратором 11. Поэтому, в скользящем режиме на выходе сумматора 4 будет производная входного сигнала, передаточная функция устройства будет иметь вид
.p+l
где
v- -ie-Or Кс
ДК
+ f
l+Y+lf
деТ| - постоянная времени интегратора 11 Т2 - постоянная времени интегратора 10 ЛК - мастабный коэффициент в цепи суммирования сигнала, идущего с блока 18 умножения,
Кс - коэффициент (отрицательный), с которым выходной сигнал интегратора 10 суммируется в сумматоре 7. Под действием помех скользящий режим прекращается и возникает режим переклю- чений, при этом из-за инерционности обратной связи через интегратор 12 в течение времени корреляции шума сохраняется неверное, с ошибкой, изменение сигнала на выходе интегратора 10. Но добавление на вход интегратора через сумматор 7 и блоки 22 и 23 умножения сигнала, пропорционального Б(Т) (см. чертеж), уменьшает ошибку дифференцирования, так как регулярная составляющая выходного сигнала быстрее меняет знак, чем сигнала e(t). При наличии помех связь между входом и выходом устройства описывается дифференциальным уравнением третьего порядка с коэффициентами, увеличивающимися вместе с дисперсией помехи, что и обеспечивает ее подавление.
Формула изобретения
5
0
Дифференцирующее устройство, содержащее первый вычитающий элемент, перQ вый вход которого является входом устройства, а выход соединен с первым входом первого сумматора, выход которого соединен с входом первого интегратора, выход которого соединен с первым входом второго сумматора, с входом первого релейного элемента, с первым входом первого блока умножения и с вторым входом первого сумматора, третий вход которого соединен с выходом первого блока умножения, второй вход второго сумматора подключен к выходу первого источника постоянного сигнала, а выход, являющийся выходом устройства, соединен с первым входом третьего сумматора, выход которого через второй интегратор соединен с вторым входом первого вычитающего элемента, выход первого релейного элемента соединен с первым входом второго блока умножения, выход которого соединен с вторым входом первого блока умножения, третий блок умножения, выход которого соединен с первым входом второго вычитающего элемента, выход которого сое0 динен с вторым входом третьего сумматора и с входом второго релейного элемента, выход которого через последовательно соединенные третий интегратор и элемент ограничения соединен с вторым входом второго блока умножения, выход первого блока ум5 ножения соединен с третьим входом первого сумматора, второй источник постоянного сигнала, элемент масштабирования, четвертый сумматор, отличающееся тем, что.
5
с целью повышения точности дифференцирования, устройство содержит третий, четвертый и пятый вычитающие элементы, четвертый, пятый, шестой и седьмой блоки умножения, третий и четвертый релейные элементы, выход первого вычитающего элемента соединен с первым входом третьего вычитающего элемента, второй вход которого соединен с выходом первого интегратора, а выход - с вторым входом второго вычитающего элемента, с входом третьего релейного элемента и с первыми входами четвертого и пятого блоков умножения, выход второго блока умножения соединен с первым входом третьего блока умножения, выход первого интегратора через элемент мас- щтабирования соединен с вторым входом третьего блока умножения, с первым входом шестого блока умножения и с первым входом
четвертого вычитающего элемента, выход которого через четвертый релейный элемент соединен с первыми входами пятого вычитающего элемента и четвертого сумматора,
вторые входы которых соединены с выходом второго источника постоянного сигнала, а их выходы соединены соответственно с вторым входом четвертого блока умножения и с первым входом седьмого блока умножения, второй вход которого соединен с выходом щестого блока умножения, выходы четвертого и седьмого блоков умножения соединены соответственно с четвертым и пятым входами первого сумматора, выход третьего релейного элемента с вторыми входами пятого и шестого блоков умножения, выходы которых соединены с вторыми входами четвертого вычитающего элемента и седьмого блока умножения соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференцирующее устройство | 1985 |
|
SU1267440A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Субоптимальный фильтр для оценки параметра случайного процесса | 1989 |
|
SU1619307A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| УСТРОЙСТВО ДЛЯ ВЕСОВОГО ДОЗИРОВАНИЯ ВЕЩЕСТВ, ПОДЛЕЖАЩИХ СМЕШИВАНИЮ | 1986 |
|
SU1387608A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Адаптивный прогнозатор | 1982 |
|
SU1049866A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
Изобретение относится к автоматике и аналоговой вычислительной технике и предназначено для получения производной сигнала при наличии шума, характеристики которого априори неизвестны. Цель изобретения - повышение точности дифференцирования. Устройство содержит с первого по пятый вычитаюшие элементы 1-5, с первого по четвертый сумматоры 6-9, с первого по третий интеграторы 10-12, два источника постоянного сигнала 13, 14, элемент 15 масштабирования, семь блоков умножения 16- 18, 20-23, четыре релейных элемента 19, 25-27, элемент ограничения 24. При отсутствии шумов устройство работает в сколь- зяшем режиме, обеспечивая высокое качество дифференцирования. При наличии Hiy- мов оно является дифференцируюп1им фильтром, фильтруюпше свойства которого зависят от дисперсии помехи. 1 ил. бхоЭЛ Itl / ьпгцш сл со со у о С5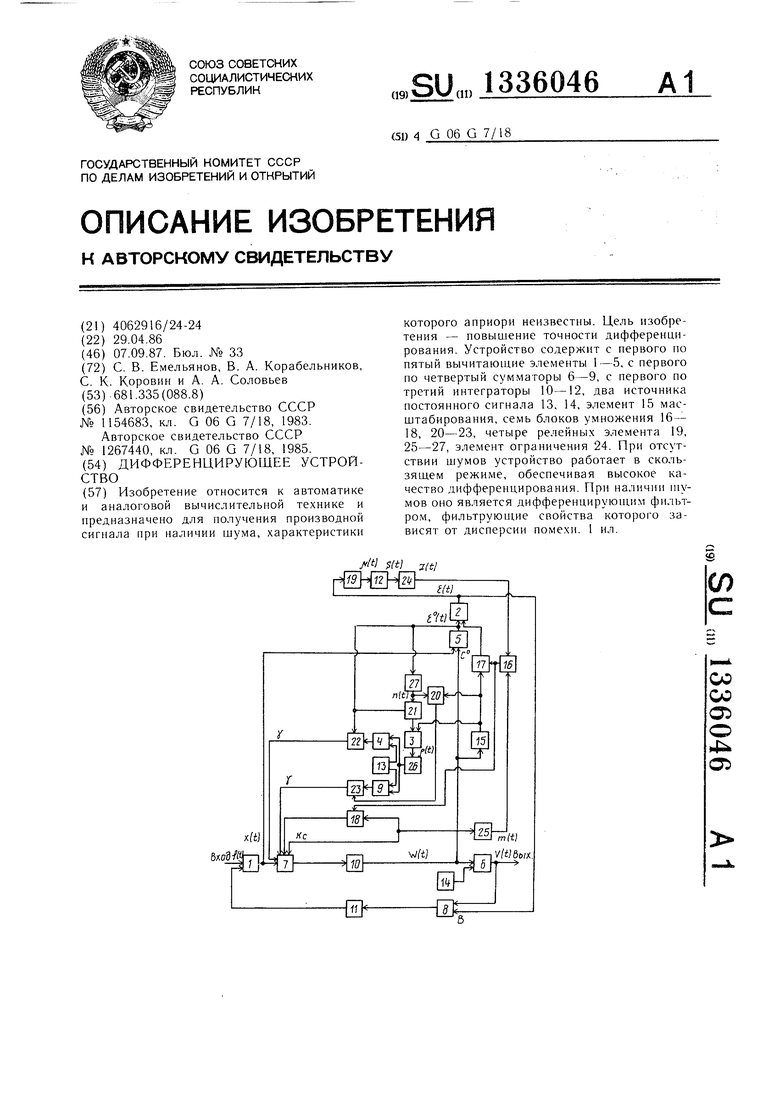

| Авторское свидетельство СССР № 1154683, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Дифференцирующее устройство | 1985 |
|
SU1267440A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
