Изобретение относится к специализированной вычислительной технике и может быть использовано при оценке состояния нелинейных объектов в условиях действия немарковских шумов.
Цель изобретения - повышение точности фильтрации при воздействии немарковских шумов и упрощения.
Поставленная цель достигается исключением (N-1) контура фильтрации за счет осуществления операции предельного перехода в уравнениях фильтра и введением в блок переменного коэффициента двух групп линейных дифференциальных контуров«
Показано при синтезе прототипа, что субоптимальное оценивание выходного марковского сигнала Y.J. дикамической нелинейной стохастической системы по сигналу наблюдения Z, снимаемого с нелинейного измерителя с мультипликативной помехой, может быть реализовано последовательным соединением соответствующей совокупности контуров оценки.
В описании фильтра рассматривается случай белых гауссовских шумов. Более общим по отношению к данному случаю является наличие в реальных системах объект - наблюдатель как указанных шумов, так и немарковских шумов, представляющих собой конечный ряд временных функций со случайными постоянными гауссовскими коэффициентами. При выводе предполагается, что в уравнение состояния нелинейного
Со
объекта добавляется немарковская составляющая шума М
ОЦ V:(t),
J 1 а в уравнении наблюдателя немарковская составляющая шума измерителя
I/W0
, Aj - случайные гауссовские коэффициенты, некоррелированные между собой,
f1(y,t)+Ki.(Zt -f (Y,t))i
где oil
л
Y л Y
M(Y0);
Ц/j , Cfl - известные аналитические функции.
Используя методику синтеза субоптимального фильтра .и методику синтеза оптимального линейного фильтра для рассматриваемого класса помех и с целью увеличения точности оценивания с увеличением номера приближения, совершая предельный переход, получают совокупность выражений, характеризующую искомый субоптимальный фильтр в окончательной форме:

| название | год | авторы | номер документа |
|---|---|---|---|
| Фильтр Калмана | 1987 |
|
SU1385265A1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| Стохастический фильтр | 1989 |
|
SU1675905A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| Регуляризованный фильтр Калмана | 1989 |
|
SU1651355A1 |
| РОБАСТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2826922C1 |
| Цифровой обнаружитель фазоманипулированных сигналов | 2015 |
|
RU2634382C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
| Цифровой фильтр | 1988 |
|
SU1555828A1 |
| ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1994 |
|
RU2083410C1 |
Изобретение относится к специализированной вычислительной технике и может быть использовано при оценке состояния нелинейных объектов в условиях действия немарковских шумов. Цель изобретения - повышение точности фильтрации при воздействии не- марковскил шумов и упрощение. По- ставленняя цель достигается исключ - нием группы контуров фильтрации путем осуществления операции предельного перехода в уравнениях фильтр и обеспечением формирования составляющих апостериорной дисперсии, учитывающих действие немапковских шумов в нелинейной системе. Фильтр содержит функциональные преобразователи, умножители, вычктатели, сумматоры, - ч- теграторы, преобразователь отгенки параметра в апостериорную составляющую оценки производной с переменным коэффициентом усиления, блоки оценки дисперсии немарковского шума, блоки умножения на постоянную величину, делитель, блок фильтрации. 1 ил. Р
3fj
Kt Rf -QY5 (Y ° Rpj tfj(t)) .t)-
M
2(|г(0 Kttr it + ,t) +
3Y
A
j(Y,t)T4 + 2Kt.f6(Y,t)-5lRp.
.-U.
Of дО f A
-N V 0 J-3 ,
Cfj(t)-2f5(Y,t).
/Й
(-0
.)
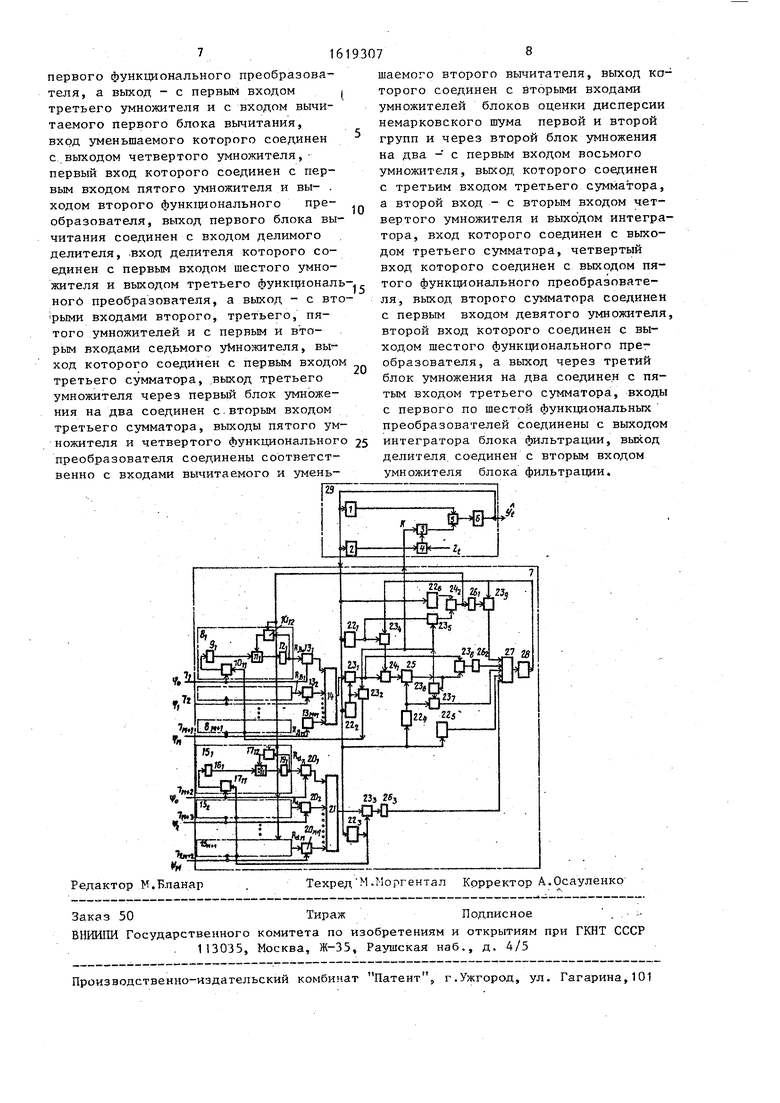
На чертеже представлена функциональная схема фильтра.
Фильтр содержит функциональные преобразователи 1 и 2, умножитель 3, вы- читатель 4, сумматор 5, интегратор 6, преобразователь 7 оценки параметра в апостериорную составляюгаую оценки производной с регулируемым коэффициентом усиления.
Преобразователь 7 содержит первую группу блоков 8 оценки дисперсии немарковского шума, состоящих из блоков 9 умножения на постоянную величину, умножителей 10, сумматоров 11 и интеграторов 12 контура, группу умножителей 13, сумматор 14, вторую группу блоков 15 оценки немарковского шума, состоящих из блоков 16 умножения на постоянную величину, умножителей 17, сумматоров 18, интеграторов 19, группу умножителей 20, сумматор 21, функциональные преобразователи 22, умножители 23, вычитатепи 24, делитель 25
R
M
-2f5(Y,t).
/Й
(-0
j
);
.),
f5(Y,t).q;j(tj.DpCj.,
блоки 26 умножения на два, сумматор 27, интегратор 28, элементы 1-6 образуют блок 29 фильтрации.
Коэффициенты умножения в блоках умножения на постоянную величину выбираются равными:
0
В функциональных преобразователях реализуются следующие нелинейные функции: 1 --f4(X)J ,(X)i
22
22, 22Ј
-H1 « . Z2
-f5(X)-; 224
22,
f|(x)(V.
5
3V
-f6(X);
-ffW Q
ifi(x).
ax v
-5 u-i 6
Фильтр работает следующим образом.
На вход блока - вход уменьшаемого вычитателя 4 поступает сигнал
16
ч форми-наблюдения Z.L. R вычитателе руется текушее значение обновляющего процесса |Zi - f,(Y,t)j , в умножителе 3 происходит его умножение на текущее значение коэффициента К., поступающее с выхода преобразователя 7, и формируется апостериорная составляющая оценки, которая в сумме с априорной составляющей f(Y,t) с выхода функционального преобразователя 1 обеспечивает равел- ство выходного сигнала сумматора 5 текущему значению производной оценки Y|. Сигнал V. f проходя через интегратор 6, обеспечивает формирование на выходе блока 29 фильтрации текущей оценки YЈ, которая поступает также на входы всех преобразователей 1, 2 и 22.
Формула изобретения
Субоптимальный фипьтр для оценки параметра случайного процесса, содержащий блок фильтраттии, содержащий два функциональных преобразователя, умножитель, вычитатель, сумматор , интегратор и преобразователь оценки параметра в апостериорную составляющую оценки производной с регулируемым коэффициентом усиления, причем в блоке фильтрации первый, второй входы и выход сумматора соединены соответственно с выходом первого функционального преобразователя, выходом умножителя и входом интегратора, выход которого является выходом фильтра, отличающийся тем, что, с целью повышения точности фильтрации при воздействии немарковских шумов и упрощения, преобразователь оценки параметра в апостериорную составляющую оценки производной с регулируемым коэффициентом усиления содержит две группы блоков оценки дисперсии немарковского шума, две группы умножителей, три сумматора,-тесть функциональных преобразователей, девять умножителей, два вычитателя, делитель, три блока умножения.на два, интегратор, причем блок оценки дисперсии немарковского шума содержит два умножителя, сумматор, блок умножения на постоянную величину, интегратор, первые входы первых умножителей блоков оценки дисперсии немарковского шума первой группы яв14
0
5
0
5
0
5
0
5
0
5
-ткются входами задания шумовых функций объекта фильтра, первые первых умножителей блоков оцеьк-; дисперсии немарковского шума второй группы являются входами задания шумовых функций измерителя фичьтра, выход интегратора соединен с входами первого ч втгрого функциональных преобразователей, выход второго функционального преобразователя соединен с входом вычитаемого зычитателя, выход когоргго соединен с первьгм входом умножителя, г. вход уменьшаемого является информационным входом фильтра, в преобразователе оценки параметра в апостериорнуг составляющую оценки производной с регулируемым коэффициентом усиления выход первого умножителя каждого блока оценки дисперсии немарковского шума первой и второй групп через первый блок умножения на постоянную величину соответствующего блока оценки дисперснм немарковского шума соединен с первым входом сумматора блока оценки дисперсии немарковского шума, второй вход которого соединен с выходом второго умножителя соответствующего олока оценки дисперсии немарковского шума соответствующей группы, выход которого через интегратор соответствующего блока оценки дисперсии немарковского шума соответствующей группы соединен с первым входом второго умножителя блока оценки дисперсии немарковского шума соответствующей группы, первые входы умножителей первой группы соединены с выходами интеграторов соответствующих блоков оценки дисперсии немарковского шума первой группы, а вторые входы подключены к входам задания шумовых функций объекта фильтра, первые входы умножителей второй группы соединены с выходами интеграторов соответствующих блоков оценки дисперсии немарковского шума второй группы, а вторые входы подключены к входам задания шумовых функций измерителя фильтра, выходы умножителей первой группы соединены с соответствующими входами первого сумматора, выходы умножителей второй rpynnfci соединены с соответствующими входами второго сумматора, выход первого сумматора соединен с первым входом первого умножителя, второй , вход которого соединен с первым входом второго умножителя и с выходом
первого функционального преобразователя, а выход - с первым входом третьего умножителя и с входом вычитаемого первого блока вычитания, вход уменьшаемого которого соединен с выходом четвертого умножителя, первый вход которого соединен с первым входом пятого умножителя и вы- . ходом второго функционального преобразователя, выход первого блока вычитания соединен с входом делимого делителя, вход делителя которого соединен с первым входом шестого умножителя и выходом третьего функциональ ного преобразователя, а выход - с вто рыми входами второго, третьего, пятого умножителей и с первым и вторым входами седьмого умножителя, выход которого соединен с первым входом третьего сумматора, выход третьего умножителя через первый блок умножения на два соединен с вторым входом третьего сумматора, выходы пятого умножителя и четвертого функционального преобразователя соединены соответственно с входами вычитаемого и уменьfF
Редактор М.Бланар
Техред М.Моргентал Корректор А.Осауленко
Заказ 50ТиражПодписное .
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
5
шаемого второго вычитателя, выход которого соединен с вторыми входами умножителей блоков оценки дисперсии немарковского шума первой и второй групп и через второй блок умножения на два - с первым входом восьмого умножителя, выход, которого соединен с третьим входом третьего сумматора, а второй вход - с вторым входом четвертого умножителя и выходом интегратора, вход которого соединен с выходом третьего сумматора, четвертый вход которого соединен с выходом пятого функционального преобразователя, выход второго сумматора соединен с первым входом девятого умножителя, второй вход которого соединен с выходом шестого функционального преобразователя, а выход через третий блок умножения на два соединен с пятым входом третьего сумматора, входы с первого по шестой функциональных преобразователей соединены с выходом интегратора блока фильтрации, выход делителя соединен с вторым входом умножителя блока фильтрации.
| Авторское свидетельство СССР № 1405551, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Казаков И.К, Статистическая теория систем управления в пространстве состояний.- М: Наука, 1975, с | |||
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
