113
Изобретение относится к коммунальному машиностроению, в частности к устройствам для загрузки мусоровозов
Цель изобретения - упрощение экс- Ш1уатаци.и путем обеспечения автоматического ориентирования губок захвата параллельно боковым стенкам контейнера при его фиксации и симметрично относительно телескопической секции стрелы.
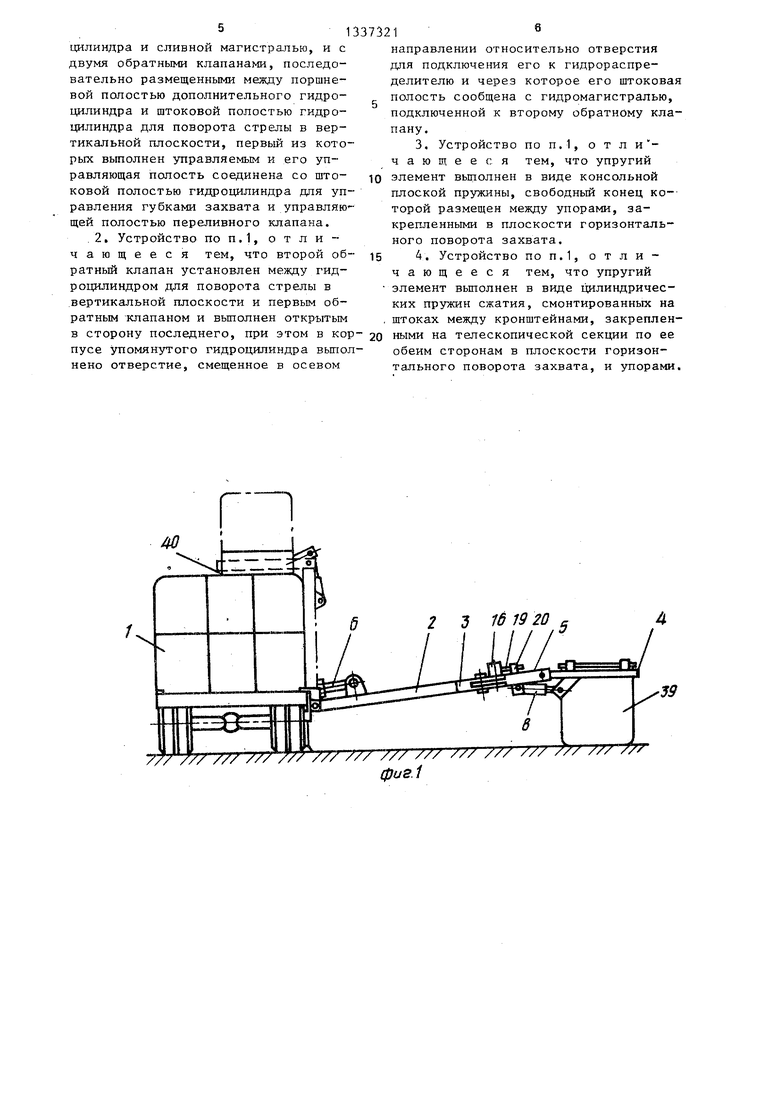
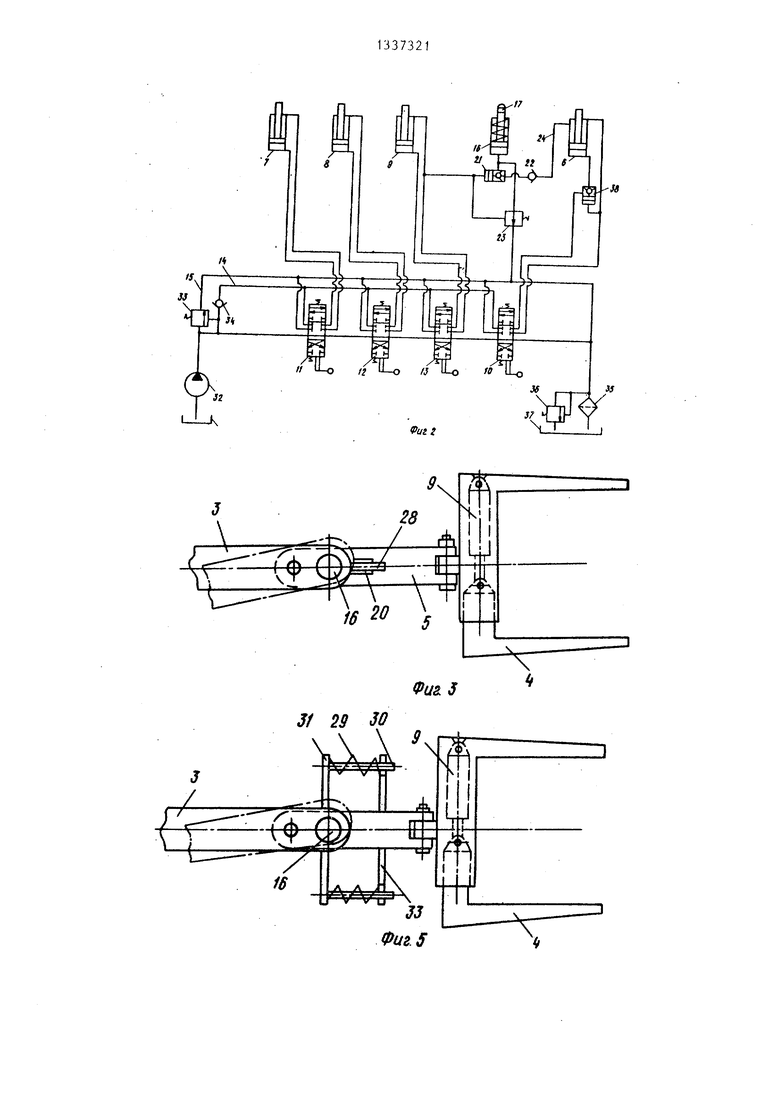
На фиг.1 схематично изображено устройство 7Ц1Я загрузки мусоровозов вид сбоку; на фиг,2 - схема гидросистемы; на фиг.З - вариант вьтолнения приспособления для стопорения вставки с упругим элементом в виде плоской пружины, вид сверху; на фиг.4 - то же,вид сбоку; на фиг.5 - вариант вьтолнения приспособления для стопо- рения вставки с упругим элементом в виде цилиндрических пружин, вид сверху; на фиг.6 - гидроцилиндр для поворота стрелы в вертикальной плоскости, продольный разрез.
Устройство смонтировано на мусоровозе 1 и содержит шарнирно сочлененные стрелу 2 с телескопической сек1щей 3 и раздвижной захват 4, установленный на -последней посредством вставки 5 с возможностью поворота в вертикальной и горизонтальной плоскостях, устройство снабжено гидропи линдрами 6-9,, соответственно для поворота стрелы в вертикальной плос- кости, перемещения телескопической секцрш, поворота захвата, в вертикальной плоскости и управления его губками. Гидроцилиндр 6 соединен с гидрораспределителем 10, гидродилиндр 7 - с гидрораспределителем 11, гидроцилиндр 8 - с гидрораспределителем 12, а гидроцилиндр 9 - с гидрорас- предет ителем 13. Гидрораспределители 10-13 сообщены с напорной магист- ралью 14 и сливной магистралью 15 г идросистемы. Вставка снабжена нри- с-пособлением для стопорения, вьтол- иенным в виде закрепленных на телескопической секции дополнител:ьного г идрои;илиндра 16 с подпрунсиненным BITOKOM, имеющим фиксатор 17, вводимы Б отверстие 18 вставки 5, и упругого элемента 19, взаимодействующего с упорами 20, смонтированными на встав . Поршневая полость гидроцилиндра 16 подключена через управляемые обратные клапаны 21 и 22 к штоковой г олости гидроцилиндра 6, Управляющая
12
полость клапана 21 соединена с штоковой полостью гидроцилиндра 9 и управляющей полостью переливного клапана 23, установленного между сливной магистралью 15 гидросистемы и поршневой полостью гидроцилиндра 16. Обратный клапан 22 установлен между управляемым обратным клапаном 21 и гатоковой полостью гидроцилиндра 6 и вьтолнен открытым в сторону клапана 21. Гидромагистраль 24, посредством которой связаны обратный клапан 22 и гидроцилиндр 6, соединена со штоковой полостью последнего через отверстие 25, вьшолненное в боковой стенке его корпуса 26. Отверстие 25 смещено в осевом направлении на расстояние h относительно отверстия 27, с которым соединен гидрораспределитель 10 гидроципиндра 6. Упругий элемент 19 может быть выполнен в вид консольной плоской пружины 28, жестк закрепленной одним концом к телескопической секции 3, а другим концом смонтированной между упорами 20, жестко закрепленными в плоскости горизонтального поворота захв ата 4 на вставке 5 (фиг.З). В другом варианте упругий элемент выполнен в виде цилиндрических пружин 29 сжатия, смонтированных на штоках 30 между кронштейнами 31, жестко прикрепленными к телескопической секции 3 по обе стороны от нее в плоскости горизонтального поворота захвата 4, и упорами 20, жестко закрепленными на вставке 5 (фиг,5).
Напорная магистраль 14 гидросистемы соединена с насосом 32, снабженным предохранительным клапаном 33 и обратным клапаном 34, а сливная магистраль 15 через фильтр 35, оборудованный предохранительным клапаном 36, подключена к баку 37, В магистрали управления гидроцилиндром 6 имеется управляемый обратный клапан 38, Захват 4 взаимодействует с контейнерами 39, опрокидываемыми с мусором в приемный бункер 40 мусоровоза.
Устройство для загрузки мусоровозов работает следуюшрм образом.
Оператор, установив м соровоз 2 в такое положение, чтобы контейнер 39 находился в рабочей зоне для загрузки, включением гидрораспределителей 10, 11 и 12 приводит в действие гидроцилиндры 6,, 7 и 8 соответственн
для поворота стрепы 2 в вертикальной плоскости, выдвижения ее телескопической секции 3 и поворота захвата 4 вниз в вертикальной плоскости, тем самым размещая захват у контейнера, расположенного на земпе. При этом вследствие допустимой неточности установки мусоровоза относительно контейнера рабочие губки захвата размещаются непараллельно относительно боковых стенок контейнера, В процессе установки захвата на контейнере вследствие того, что захват является свободным и штоковая полость гидроцилиндра 9 не нагружена, управляемый клапан 21 закрывается, а переливной клапан 23 открывается, в результате чего рабочая жидкость из поршневой полости гидроцилиндра 16 вытесняется через переливной клапан в сливную магистраль 15. Шток гидроцилиндра 16 втягивается в его фиксатор 17 выходит из отверстия 18 в вставке 5. Во время фиксации захвата на контейнере при помощи гидроцилиндра 9,приводимого в действие гидрораспределителем 13, при непараллельности губок захвата относительно боковых стенок кон-Езйнера возникает разворачивающий момент относительно освобожденного фиксатором 17 шарнира горизонтального поворота вставки и она вместе с захватом преодолевает действие упругого элемента 19 и поворачивается до положения, когда губки захвата ориентируются параллельно боковым стенкам контейнера. Одновременно с этим при увеличении давления в што- ковой полости гидроцилиндра 9 рабочая жидкость поступает в управляющие полости управляемого обратного клапана 21 и переливного клапана 23, тем самым открывая клапан 21 и зак- рБтая клапан 23. Связь поршневой полости гидроцилиндра 16 со сливной магистралью 15 нарушается, а штоковая полость гидроцнлиндра 6 через обратный клапан 22 и управляемый обратный клапан 21 соединяется с поршневой полостью гидроцилиндра 16. После надежной фиксации контейнера захватом оператор при помощи гидрораспределителя 10 соединяет напорную магистраль 14 с штоковой полостью гидроцилиндра 6, а сливную магистраль 15 - с его поршневой полостью, чем обеспечивается подъем контейнера. На определенной небольшой высоте подъема
0
5
0
контейнера от земпи, достаточной для симметричной ориентации под действием упругого элемента 19 захвата с контейнером относительно продольной оси стрелы 2 и ее телескопической секции 3, поршень гидроцилиндра 6 проходит расстояние h (фиг.6) и открывает отверстие 25. Рабочая жидкость через обратный клапан 22 и управляемый обратный клапан 21 поступает в поршневую полость гидроцилиндра 16. Фиксатор 17 заходит в отверстие 18 вставки 5 и фиксирует ее неподвижно относительно телескопической секции 3 стрелы.
Дальнейший подъем и разгрузка контейнера в приемный бункер 40 мусоровоза осуществляется при помощи гид- ровдлиндров 6, 7 и 8, приводимых в действие посредством включения гидрораспределителей 10, 11 и 12, Возврат и установка порожнего контейнера на . землю осуществляется в обратном по- 5 рядке.
Формула изобретения
1. Устройство для загрузки мусо- Q ровозов, содержащее стрелу с телескопической секцией, к которой посредством вставки шарнирно прикреплен раздвижной захват, и гидроцилиндры соответственно для поворота стрелы в вертикальной плоскости, перемещения телескопической секции, поворота захвата в вертикальной плоскости и управления его губками, соединенные при помощи гидрораспределителей с напорной и сливной магистралями гидросистемы, отличающееся тем, что, с целью упрощения эксплуатации путем обеспечения автоматического ориентирования губок захвата параллельно боковым стенкам контейнера при его фиксации и симметрично относительно телескопической секции стрелы, вставка снабжена приспособлением для стопорения, вьтолненным в виде закрепленных на телескопической секции дополнительного гидроцилиндра, шток которого подпруж нен и имеет на конце вводимый в отверстие вставки фиксатор, и упругого элемента, взаимодействующего с упорами, смонтированными на вставке, при этом гидросистема выполнена с переливным клапаном, установленным между поршневой полостью дополнительного
5
0
5
0
5
51
цилиндра и сливной магистралью, и с двумя обратными клапанами, последовательно размещенными между поршневой полостью дополнительного гидроцилиндра и штоковой полостью гидроцилиндра для поворота стрелы в вертикальной плоскости, первый из которых вьтолнен управляемым и его управляющая полость соединена со што- КОБОЙ полостью гидроцилиндра для управления губками захвата и управляю щей полостью переливного клапана.
2, Устройство по П.1, отличающееся тем, что второй об- ратный клапан установлен между гидроцилиндром для поворота стрелы в вертикальной плоскости и первым обратным клапаном и вьшолнен открытым
в сторону последнего, при этом в кор- 20 ными на телескопической секции по ее пусе упомянутого гидроцилиндра вьшол- обеим сторонам в плоскости горизон- нено отверстие, смещенное в осевомтального поворота захвата, и упорами.
р-
в
направлении относительно отверстия для подключения его к гидрораспределителю и через которое его штоковая полость сообщена с гидромагистралью, подключенной к второму обратному клапану.
3.Устройство по П.1, о т л и - чающееся тем, что упругий элемент выполнен в виде консольной плоской пружины, свободный конец ко- торой размещен между упорами, закрепленными в плоскости горизонтального поворота захвата.
4.Устройство по П.1, отличающееся тем, что упругий элемент выполнен в вкце цилиндрических пружин сжатия, смонтированных на штоках между кронштейнами, закреплен/7/ /// //
2 Ъ 161920
.It t / /
77/ /// / фи8.1
У/ /// /VV /// /V
r
17
IS- V
гт
ifln
5
ч:
и
/ //
) )r
S
t/J Ич)
f
игг
X
37


| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1986 |
|
SU1331745A1 |
| Мусоровоз | 1986 |
|
SU1359221A1 |
| Устройство для разгрузки контейнеров в кузов мусоровоза | 1986 |
|
SU1381038A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| Загрузочное устройство мусоровоза | 1985 |
|
SU1323471A1 |
| Мусоровоз | 1982 |
|
SU1071534A1 |
| МУСОРОВОЗ КУЗОВНОЙ ЗАКРЫТОГО ТИПА | 2004 |
|
RU2278067C1 |
| МУСОРОВОЗ КУЗОВНОЙ ЗАКРЫТОГО ТИПА | 2007 |
|
RU2357910C2 |
| Мусоровоз | 1985 |
|
SU1351842A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |

Изобретение относится к коммунальному машиностроению. Цель изобретения - упрощение эксплуатации. Устройство включает стрелу с телескопической секцией 3, к которой посредством вставки 5 шарнирно присоединен раздвижной захват 4. Для автоматического ориентирования губок захвата параллельно боковым стенкам конвейера при его фиксации и симметрично относительно телескопической секции стрелы возникает разворачивающий момент относительно освобожденного фиксатором 17 шарнира горизонтального поворота вставки. В результате последняя вместе с захватом, преодолевая действие упругого элемента 19, взаимодействующего с упорами 20 вставки, поворачивается до заданного положения. В момент подъема стрелы на небольшую высоту при достижении надежного зажима губками захвата стенок контейнера гидроцилиндр 16, имеющий подпружиненный шток, обеспечивает ввод фиксатора 17 в ответное отверстие 18 вставки. 3 з.п. ф-лы, 6 ил. с is (Л с :о ю
Фиг. J
J/ 2 J
Редактор А.Долинич
Составитель А.Нефедов Техред Л.Сердюкова
Заказ 4090/19Тираж 640Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
26 фиеб
77
Корректор С.Шекмар
