щей полостью 52 из нейтральной в . крайнюю позицию. При этом поступаю- 1цая в взводящую камеру 29 рабочая лидкость приводит в работу ГР без
1
Изобретение относится к коммунальному машиностроению, в частности к мусоровозам, предназначенным для сбора и вывоза твердых отходов.
Цель изобретения - расширение технологических возможностей и упрощени эксплуатации мусоровоза путем обеспечения разрыхления замерзших отходов в контейнерах перед разгрузкой и их встряхивания в процессе опорожнения.
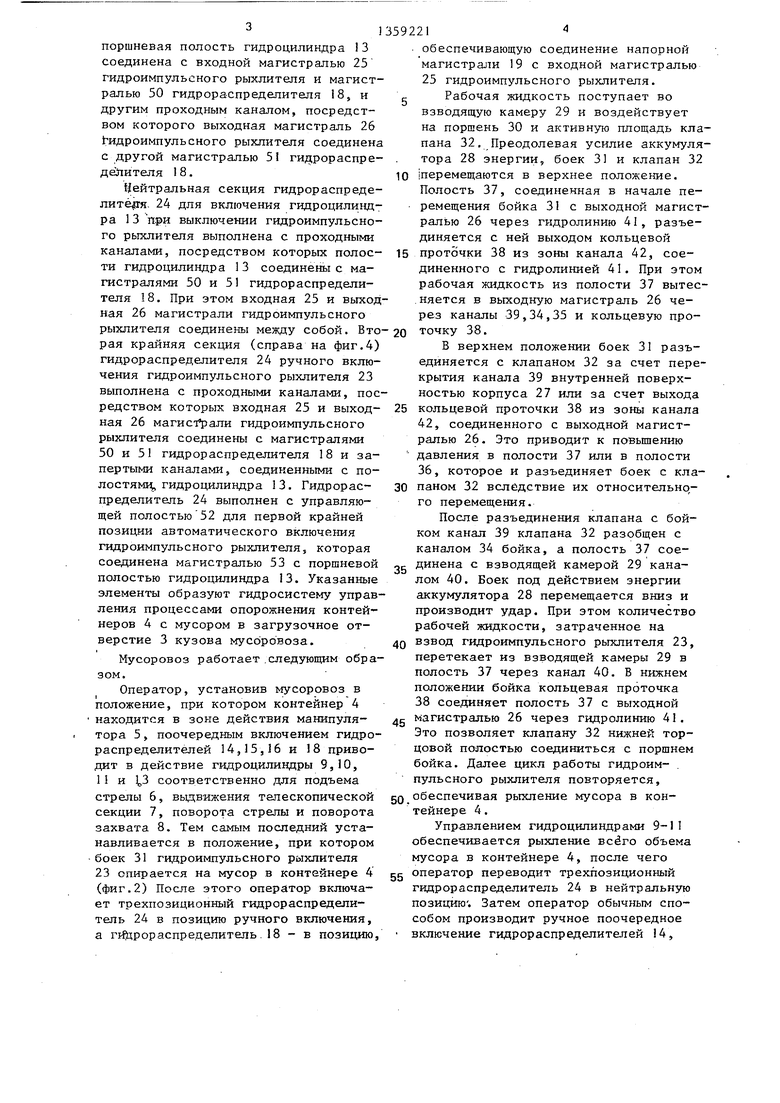
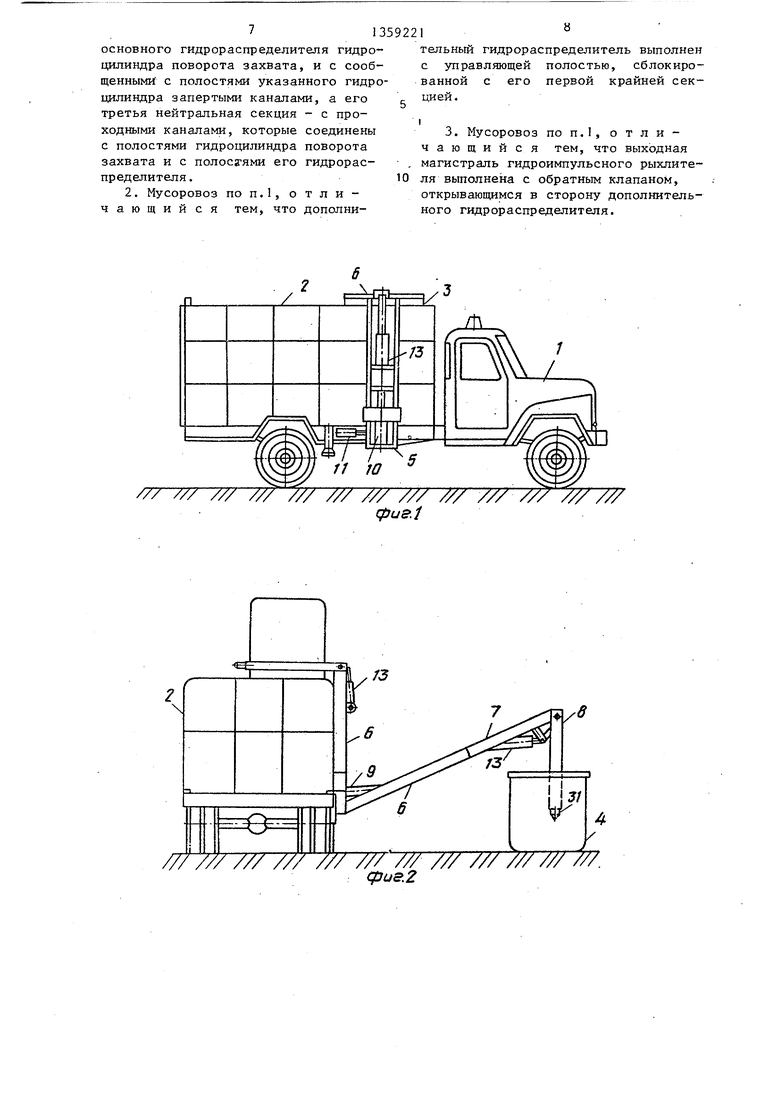
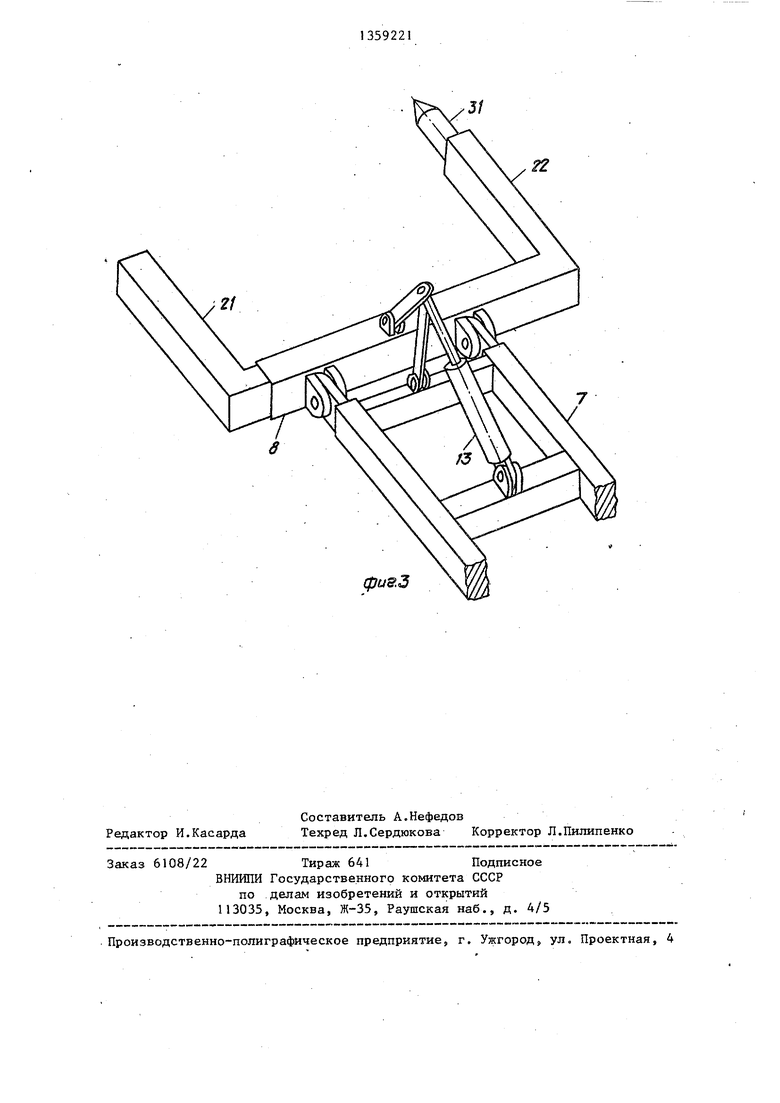
На фиг.1 изображен мусоровоз, вид сбоку в транспортном положении; на фиг.2 - то же, вид сзади при разрыхлении отходов; на фиг.З - захват для контейнеров, аксонометрическая проекция; на фиг.4 - схема гидросистемы управления манипулятором.
Мусоровоз содержит транспортное средство с кузовом 2, имеющим заг- рузочное отверстие 3 в верхней передней части для опорожнения Контейнеров 4 с мусором и шарнирно-рычажный манипулятор 5. Последний выполнен со стрелой б р снабженной телескопической секцией 7, захватом 8 и гидроцилиндрами 9-13 соответственно для подъема стрелы, выдвижения телескопической секции, поворота стрелы в .горизонтальной плоскости, фиксации и поворота захвата.
Гидроцилиндр 9 подъема стрелы соединен с гидрораспределителем 14,.гидроцилиндр 10 вьщвижения телескопической секции - с гидрорасп1ределйтелем 15, гидроцилиндр П поворота стрелы в горизонтальной плоскости - с гидрораспределителем 16, гидроцилнндр 12 фиксации захвата - с гидрораспределителем 17, гидроцилиндр 13 поворота захвата - с гидрораспределителем 18. Гидрораспределители 14-18 соединены с напорной 19 и сливной 20 магистралями гидросистемы.
Захват 8 выполнен с подвижной 21 и неподвижной 22 губками. Последняя выполнена в виде .гидроимпульсного
упора бойка в какое-либо препятствие за счет чего захвату и контейнеру с отходами передаются колебательные движения от ГР, 2 з.Ло ф-лы, 4 ил.
рыхлителя 23, соединенного с трехсек- ционным гидрораспределителем 24 посредством входной 25 и выходной 26 магистралей.
5 Рыхлитель 23 состоит из корпуса 27 с аккумулятором 28 энергии и взводящей камерой 29, внутри которой расположен поршень 30 бойка 31 и нижняя часть ступенчатого клапана 32. Боек
0 31 снабжен штоком 33 с каналами 34 и :35. Клапан 32 вьшолнен с глухим дном и полостью 36, в которой установлен с возможностью осевого перемещения ;шток 33 бойка,
5 Наружная поверхность клапана 32 образует с корпусом 27 полость 37, периодически сообщающуюся с выходной магистралью 26 и взводящей камерой 29 с помощью каналов 34 и 35, кольце0 вой проточки 38 бойка 31 и каналов 39 и 40, выполненных в стенках клапана 32, а также через гидролинию 41 и канал 42, образованный в корпусе 27. Входная магистраль 25 соединена с взводящей камерой 29. В выходной магистрали 26 смонтирован обратный клапан 43 5 установленный открытым в сторону трехсекцконного гидрораспределителя.
Напорная магистраль 19 гидросистемы подключена к насосу 44, оборудо- BaHHot-iy предохранительным клапаном 45, а.сливная магистраль 20 через фильтр 46, снабженный предохраннтель5 ным клапаном 47, соединена с баком 48. В гидролинию гидроцилиндра 9 подъема стрелы 6 включен управляемьш о братный клапан 49.
Гидрораспределитель 24 установлен
между гидроцилиндром 13 и гидрорас- гфеделителем 18 поворота захвата 8. Первая крайняя секция гидрораспреде- яителя 24 (слева на фиг.4) для автоматического включения гидроимпульсно го рыхлителя выполнена с одним про- ходньм каналом, посредством которого
5
0
поршневая полость гидроцилиндра 13 соединена с входной магистралью 25 гидроимпульсного рыхлителя и магистралью 50 гидрораспределителя 18, и другим проходным каналом, посредством которого выходная магистраль 26 Ьидроимпульсного рыхлителя соединена с другой магистралью 51 ги;,рораспре- деЙ1Ителя 1 8.
{;1ейтральная секция гидрораспреде- литё|гя. 24 для включения гидроцилиндра 13 выключении гидроимпульсного рыхлителя выполнена с проходными каналами, посредством которых полости гидроцилиндра 13 соединены с магистралями 50 и 5 гидрораспределителя 18. При этом входная 25 и выходная 26 магистрали гидроимпульсного рыхлителя соединены между собой. Вто рая крайняя секция (справа на фиг.4) гидрораспределителя 24 ручного включения гидроимпульсного рыхлителя 23 выполнена с проходными каналами, посредством которых входная 25 и выходная 26 магистрали гидроимпульсного рыхлителя соединены с магистралями 50 и 51 гидрораспределителя 18 и запертыми каналами, соединенными с полостям гидроцилиндра 13. Гидрораспределитель 24 выполнен с управляющей полостью 52 для первой крайней позиции автоматического включения гидроимпульсного рыхлителя, которая соединена магистралью 53 с поршневой полостью гидроцилиндра 13. Указанные элементы образуют гидросистему управления процессами опорожнения контейнеров 4 с мусором в загрузочное отверстие 3 кузова мусЬровоза.
Мусоровоз работает .следующим образом.
Оператор, установив мусоровоз в положение, при котором контейнер 4 находится в зоне действия манипулятора 5, поочередным включением гидрораспределителей 14,15,16 и 18 приводит в действие гидроцилиндры 9,10, 1 и ,3 соответственно для подъема стрелы 6, вьщвяжения телескопической секции 7, поворота стрелы и поворота захвата 8. Тем самым последний устанавливается в положение, при котором боек 31 ги,цроимпульсного рыхлителя 23 опирается на мусор в контейнере 4 (фиг.2) После этого оператор включает трехпозиционный гидрораспределитель 24 в позицию ручного включения, а гр рораспределитель.18 - в позицию
59221
. обеспечивающую соединение напорной магистрали 19 с входной магистралью 25 гидроимпульсного рыхлителя, g Рабочая жидкость поступает во взводящую камеру 29 и воздействует на поршень 30 и активную площадь клапана 32. Преодолевая усилие аккумулятора 28 энергии, боек 31 и клапан 32 10 перемещаются в верхнее положение. Полость 37, соединенная в начале перемещения бойка 31 с выходной магистралью 26 через гидролинию 41, разъединяется с ней выходом кольцевой 15 проточки 38 из зоны канала 42, соединенного с гидролинией 41. При этом рабочая жидкость из полости 37 вытесняется в выходную магистраль 26 через каналы 39,34,35 и кольцевую про- 20 точку 38.
В верхнем положении боек 31 разъединяется с клапаном 32 за счет перекрытия канала 39 внутренней поверхностью корпуса 27 или за счет выхода 25 кольцевой проточки 38 из зоны канала 42, соединенного с выходной магистралью 26. Это приводит к повышению давления в полости 37 или в полости
36, которое и разъединяет боек с кла- 30 паном 32 вследствие их относительно,- го перемещения.
После разъединения клапана с бойком канал 39 клапана 32 разобщен с каналом 34 бойка, а полость 37 сое- „g динена с взводящей камерой 29 каналом 40. Боек под действием энергии аккумулятора 28 перемещается вниз и производит удар. При этом количество рабочей жидкости, затраченное на 40 взвод гидроимпульсного рыхлителя 23, перетекает из взводящей камеры 29 в полость 37 через канал 40. В нижнем положении бойка кольцевая проточка 38 соединяет полость 37 с выходной с магистралью 26 через гидролинию 41. Это позволяет клапан 32 нижней торцовой полостью соединиться с поршнем бойка. Далее цикл работы гидроим- . пульсного рыхлителя повторяется, 5Q обеспечивая рыхление мусора в контейнере 4.
Управлением гидроцилиндрами 9-11 обеспечивается рыхпенне всего объема мусора в контейнере 4, после чего eg оператор переводит трехпозиционный гидрораспределитель 24 в нейтральную ПОЗИЦИЮ . Затем оператор обычным способом производит ручное поочередное включение гидрораспределитепей 14,
135922
15,16 и 18 соответственно датя подъеа стрелы 6, выдвижения ее телескопиеской секции 7, поворота стрелы и захвата 8, тем самым устанавливая манипулятор 5 в положение, удобное ля -захвата контейнера с мусором, асположенного на земле. Ручным включением гидрораспределителя 17 обеспечивается фиксация захватом 8 ю контейнера при помощи гидроцилиндра 12.
Подъем контейнера с мусором к загрузочному отверстию 3 осуществляется ручным включением гидрораспреде- 15 лителей 14-16. После подъема контейо
нера с мусором в исходное для разгрузки положение оператор включает гидрораспределитель 18 в позицию, обеспечивающую подачу рабочей жидкое- 20 ти.через трехпозиционный гидрораспре- делитель 24 в поршневую полость гидроцилиндра 13 для поворота захвата 8 вверх. При достижении крайнего положения поворота захвата, когда кон- 25 тейнер расположен вертикально над загрузочным отверстием кузова и гидроцилиндр 1 3 выдвигает свой шток до упора, давление рабочей жидкости в его поршневой полости и связанной с 30 ней управляющей полости 52 гидрораспределителя 24 повьшаетсяо В резуль- тате гидрораспределитель 24 автоматически переключается управляющей полостью в крайнюю позицию включения OR гидроимпульсного рыхлителя 23. При этом напорная магистраль 19 через гидрораспределитель 18 соединяется одновременно с поршневой полостью гидроцилиндра 13 и входной магист- 40 ралью 25 гидроимпульсного рыхлителя а его выходная магистраль 26 соеди- . няетсясо сливной магистралью 20. Поступающая во взводную камеру 29 рабочая жидкость приводит в действие g гидроимпульсный рыхлитель, работающий по указанному циклу без упора бойка 31 в какое-либо препятствие и обеспечивающий автоколебательное движение захвата 8 с контейнером 4 во время разгрузки последнего
После опорожнения контейнера 4 оператор включает гидрораспределитель 18 в позицию поворота захвата
8 вниз. Уменьшение давления в порш- ....
, о оь
невои полости гидроцилиндра 13 и управляющей полости 52 трехпозиционно- го гидрораспределителя приводит к автоматическому переключеш-по последне50
.
R 0 g
..
ь
0
го в нейтральную позицию. При этом выключается гидроимпульсный рыхлитель 23, а гидроцилиндр 13 поворачивает захват В вниз. Опускание порожнего контейнера на землю осуществляется известным способом ручным ь клю- чением гидрораспределителей 14,15516 и 18.
Управляемьтй обратный клапан 49 предотвращает самопроизвольное опус-. кание стрелы 6, например, при выключении насоса 44. Обратный клапан 43 блокирует подачу рабочей жидкости в выходную магистраль 26 гидроимпульсного рыхлителя.
Формула изобретения
1. Мусоровоз, содержащий транспортное средство с кузовом, имеющим загрузочное отверстие и шарнирно-ры- чажный манипулятор, снабженный захватом для контейнеров, состоящим из подвижной и неподвижной губок, и гидроцилиндрами соответственно, для подъема стрелы, выдвижения телескопической секции последней, ее поворота в горизонтальной плоскости, поворота захвата и его фиксации, соединенными посредством основных гидрораспределителей с напорной и сливной магистралями гидросистемы, отличающийся тем, что, с целью расширения технологических возможностей и упрощения эксплуатации мусоровоза путем обеспечения разрыхления замерзших отходов в контейнерах перед разгрузкой и их встряхивания в процессе опорожнения, неподвижная губка захвата вьтолнена Б виде гидроимпульсного рыхлителя с входной и выходной магистралями, которые сообщены -между собой, и дополнительным трехсекцион- гидрораспределителем, первая из крайних секций которого выполнена с двумя проходными каналами, один из которых соединен с поршневой полостью гидроцилиндра поворота захвата,, одной из полостей его основного гидрораспределителя и указанной входной магистралью,, а другой ее проходной канал с противоположной полостью гидрор аспредегштеля и указанной вы- . зотдной магистралью, при этом вторая крайняя секция дополнительного гидрораспределителя выполнена с проходными каналами, которые соединены с входной и выходной магистралями гиД- . роимпульсного рыхлитапя и полостями
7135922
основного гидрораспределителя гидроцилиндра поворота захвата, и с сообщенными с полостями указанного гидроцилиндра запертыми каналами, а его с- третья нейтральная секция - с проходными каналами, которые соединены с полостями гидроцилиндра поворота захвата и с полосуями его гидрораспределителя.10
2. Мусоровоз по П.1, о т л и - чающийся тем, что дополни1°
тельный гидрораспределитель выполнен с управляющей полостью, сблокированной с его первой крайней секцией.
I
3. Мусоровоз по П.1S отличающийся тем, что выходная магистраль гидроимпульсного рыхлителя выполнена с обратным клапаном, открывающимся в сторону дополнительного гидрораспределителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1986 |
|
SU1331745A1 |
| Мусоровоз | 1985 |
|
SU1351842A1 |
| Загрузочное устройство мусоровоза | 1985 |
|
SU1323471A1 |
| Устройство для разгрузки контейнеров в кузов мусоровоза | 1986 |
|
SU1381038A1 |
| Мусоровоз | 1982 |
|
SU1071534A1 |
| Устройство для разрушения мерзлых грунтов | 1981 |
|
SU981523A1 |
| Устройство для загрузки мусоровозов | 1986 |
|
SU1337321A1 |
| Устройство ударного действия преимущественно для рыхлителя экскаватора | 1986 |
|
SU1477901A1 |
| Рыхлитель | 1982 |
|
SU1048026A1 |
| Мусоровоз | 1988 |
|
SU1703580A1 |
Изобретение относится к коммунальному машиностроению. Цель изобре тения - расширение технологических возможностей и упрощение эксплуатации мусоровоза. Мусоровоз содержит транспортное средство с шарнирно- рычажным манипулятором, имеющим гидроцилиндры. 9, 10, 1 1 , 12 и 13 соответ ственно для подъема его стрелы, выдвижения телескопической секции, поворота стрелы в горизонтальной плосS i № /f кости, фиксации и поворота захвата. Гидроцилиндры соединены с соответствующим из гидрораспределителей (Г) ,14,15,16,17 и 18. Захват состоит из подвижной и неподвижной губок, причем последняя выполнена в виде гидроимпульсного рыхлителя (ГР) 23, подключенного к трехсекционному Г 24. Г 24 обеспечивает разрыхление замерзших отходов в контейнерах перед разгрузкой. Для этого Г 24 включается в позицию ручного включения, а Г I 8 - в позицию, обеспечивающую соединение напорной магистрали 19 с входной магистралью 25 ГР. Рабочая жидкость поступает в взводящую камеру 29 ГР. Б результате боек 31 совместно с клапаном 32 поднимаются, в верхнем положении разъединяются, после чего под действием аккумулятора 28 энергии боек опускается, производя удар по отходам. Дпя встряхивания контейнера в процессе опорожнения при выдвинутом до упора штоке гидроцилиндра 13 Г 24 ,автоматически переключается управляюfS -У § (Л рия4
/// //////////////////////// /// /////////
(pus.i
/// /// /// /// /// /// /// /// /// /// /// ///.
срие.2
J/
22
фи.З
Редактор И.Касарда Заказ 6108/22
Составитель А.Нефедов
Техред Л.Сердюкова Корректор Л.Пилипенко
Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Мусоровоз | 1983 |
|
SU1126513A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ГАЛЕЙ | 1923 |
|
SU413A1 |
| Техническое описание и инструкция по эксплуатации, Киев, УкрНИИНТИ, 1983. | |||
