Изобретение относится к дорожной технике, в частности к самоходным дорожным каткам, работающим в одном агрегате, уп- рав,-1яемом одним оператором.
lJ,e.ib изобретения новы1иение надежности путем уменьшения нагрузок в местах крепления связей между катками и обесне- чение свобды взаимных перемещений и поворотов катков в продольной и поперечной вертикальных плоскостях, а также сокращение трудозатрат па соединение и разъединение катков.
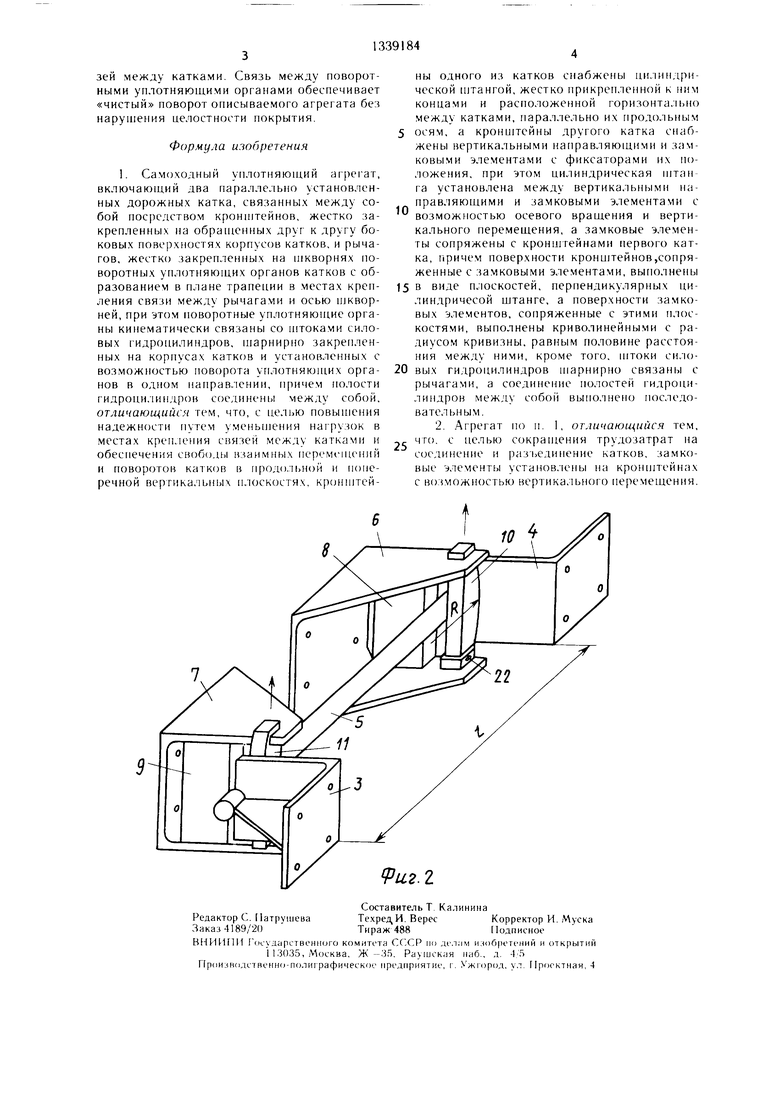
На (})иг. 1 показана схема ai-рег ата, вид н плане; на фиг. 2 - связь между корпусами катков, аксонометрическая проекция.
С .амоходный уплотпяющий агрегат включает в себя два дорожных катка 1 и 2, установ.1енных параллельно один другому. На боковой поверхности одного из катков, например 2, обращенной к катку 1, за- креп.тены па одном уровпе кропштейны 3 и 4. К ним жестко прикреплена концами ии, |индрическая штанга 5, расположенная горизонтально между катками, параллельно п продольным осям. На боковой поверхности катка 1, обращепной к катку 2, закреплены на одном уровне кропщтейны 6 и 7. Кронштейны снабженЬ) вертикальными на- правляюп1ими 8 и 9 и замковыми элементами 10 и II. Штанга 5 установлена между вертикальными нанравляющими и замковыми : лементами с возможностью осевог о врангения и вертикального перемепи ния и выполняет, таким образом, функцию горизонтального щарпира, перемеп1ающегося в вертикальпой плоскости. Замковые эле.менты 10 и 11, удерживающие штапгу 5 от горизонтальньгх перемещений, сопряжены с кронштейнами 3 и 4. При этом пове)х- ности кронштейпов, сопряженные с замковыми элементами, выполнены в виде плоскостей, перпендикулярных цилиндрической ппапге ,S. А поверхности замковых элементов, сонряженные с этими плоскостями, вы- по.тпепы криволинейными с радиусом кривизны R, равным половине расстояния / между ними. За.мковые элементы 10 и II, таким образом, выполняют функцию 1-г)ри.зонталь- ного шарнира, ось KOTOpoi o перпендикулярна продольным осям катков. /1:1Я осуще- ств,1ения поворота агрегата на ко)пусах катков 1 и 2 П1арнирпо закреплены силовые гидроцилиндры 12 и 13, полости которых соединены между собой последовательно. IIJTOKH 14 и 15 гидроцилиндров iiiap- нирпо связаны с рычагами 16 и 17, жестко (акреплеппыми па П1кворнях 18 п 19 поворотных уплотпяюп1их органов 20 и 21. При этом гидроцилиндры установлены с возможностью поворота уплотняющих органов в одном направлении, а рычаги закрепле- 11)| на пкворнях так, что места крепле- ппя к пим 1ПТОКОВ и оси шкворней образуют в плане трапецию. Кроме того, замковые элементы 10 и 11 имеют возможность вертикального перемещения при соединении и разъединении катков. В рабо- 5 чем положении замковые элементы закреплены па кронштейнах с юмонгью фиксаторов 22.
При движении агрегата катки I и 2 имеют возможность взаимных перемещений и
новоротов в цродольной и поцеречной вертикальных плоскостях. Повороты катков в по- неречной и перемещения их в продольной вертикальных плоскостях осуществляются за счет возможности осевого вращения и вер- тикальног о перемещения цилиндрической
5 Ц танги о между вертикальными направляющими 8 и 9 и замковыми элементами 10 и 11. Величина вертикальных перемещений ограничена размерами последних. Взаимные повороты катков в продольной вертикальной плоскости осуществляются за счет контакта
0 криволинейных поверхностей замковых элементов 10 и II с плоскостями кронщтей- нов 3 и 4. Угол относительного поворота ограничен вертикальпы.м размером плоскостей. Во время движения агрегата по
5 криволинейной траектории поворот ведомых уплотняющих органов 20 и 21 в одном направлении осун1.ествляется за счет гидроцилиндров 12 и 13, полости которых соединены между собой последовательно. Например, при повороте агрегата вправо масло от
0 насоса нагнетается в штоковую полость гидроцилиндра 12, заставляя переменхаться пор- теп ь. При этом масло из 11орц певой полости гидроцилиндра 12 вытесняется в иорш- невую полость гидроцилиндра 13, поршень которого, перемещаясь, вытесняет масло из
5 П1ТОКОВОЙ полости на слив. Последовательное соединение полостей гидрО |илиндров обеспечивает одинаковый ход штоков 14 и 15. При этом трапецеидальное расположение осей шкворней 18 и 19 и мест крепления П1ТОКОВ 14 и 15 к рычагам 16 и 17 обес печивает поворот уплотняюпшх opiaHOB 20 и 21 на углы, соответствующие движению катков 1 и 2 но кривым с разными ра- дпусами. Для соединения катков друг с дру- ом один из них должен быть затормо5 жен, а второй движется пара.плельно ему до соприкос}1овепия щтапги 5 с вертика;п:.- ными нанравляющими 8 и 9. Это положе- пие фиксируется двумя замковыми элементами 10 и 11, которые удерживаются от вертикальных неремещений во время движе0 пня агрегата фиксаторами 22.
При производстве работ по уплотнению различных материалов агрегат движется по новерхности, профиль которой меняется случайным образом. Свобода взаимных пере- 5 мещений агрегатируемых катков позволяет им адаптироваться к профилю уплотняемой поверхпоети, в результате чего резко уменьшаются нагрузки в местах крепления связей между катками. Связь между поворотными уплотняющими органами обеспечивает «чистый поворот описываемого агрегата без нарушения целостности покрытия.
Формула изобретения
. Самоходный уплотняюпхий агрегат, включающий два параллельно установленных дорожны.х катка, связанных между собой посредством кронштейнов, жестко закрепленных на обрап1енных друг к другу боковых поверхностях корпусов катков, и рычагов, жестко закрепленных на шкворнях поворотных уплотняющих органов катков с образованием в плане трапеции в .местах крепления связи между рычага.ми и осью шкворней, при этом поворотные уплотняющие органы кинематически связаны со щтока.ми силовых гидроцилиндров, шарнирно закрепленных на корпусах катков и установленных с возможностью поворота уплотняющих органов в одном направлении, причем полости гидроци, 1индр(5в соединены между собой, отличающийся тем, что, с цел11Ю повышения надежности путем уменьшения нагрузок в местах крепления связей между катками и обеспечения свободы взаимных перемещений и поворотов катков в продо.льной и поперечной вертикальных плоскостях, кронштей0
5 в
0
5
ны одного из катков снабжены цилиндрической штангой, жестко прикрепленной к ним концами и расположенной горизонта. между катками, параллельно их продольным осям, а кронштейны другого катка снабжены вертикальными направляющими и замковыми элементами с фиксаторами их положения, при этом цилиндрическая Н1тан- га установлена между вертикальными направляющими и замковыми элементами с возможностью осевого вращения и вертикального перемещения, а замковые элементы сопряжены с кронштейнами первого катка, гфичем поверхности кронштейнов,сопряженные с замковыми элементами, выполнены виде плоскостей, перпендикулярных ци- линдричесой штанге, а поверхности замковых элементов, сопряженные с этими плоскостями, выполнены криволинейными с радиусом кривизны, равным половине расстояния между ними, кроме того, HITOKH силовых гидроцилиндров шарнирно связаны с рычагами, а соединение полостей гидроцилиндров между собой вьи1О,пнено последовательным.
по п. 1, отличающийся тем, сокращения трудозатрат на раз ьединение катков, замко- установ. 1ены на кронпп ейиах
2. Агрегат что. с целью соединение и вые элементы
с воз.можиостью вертикального перемещения.
9u2.2
Составитель Т Калинина
Редактор С. ПатрушеваТе.хред,И. ВересКорректор И. Муска
Заказ 4189/20Тираж 488подписное
ВИИИГ1И Г ()с дарственного комитета СССР по ae. и:1обретеннй и открытий
I 13035, Москва, Ж -35. Раушская наб., д. 4/5 (1лственн(1-полиграфическое нреднрнятие, г. Ужгород, ул. Проектная, 4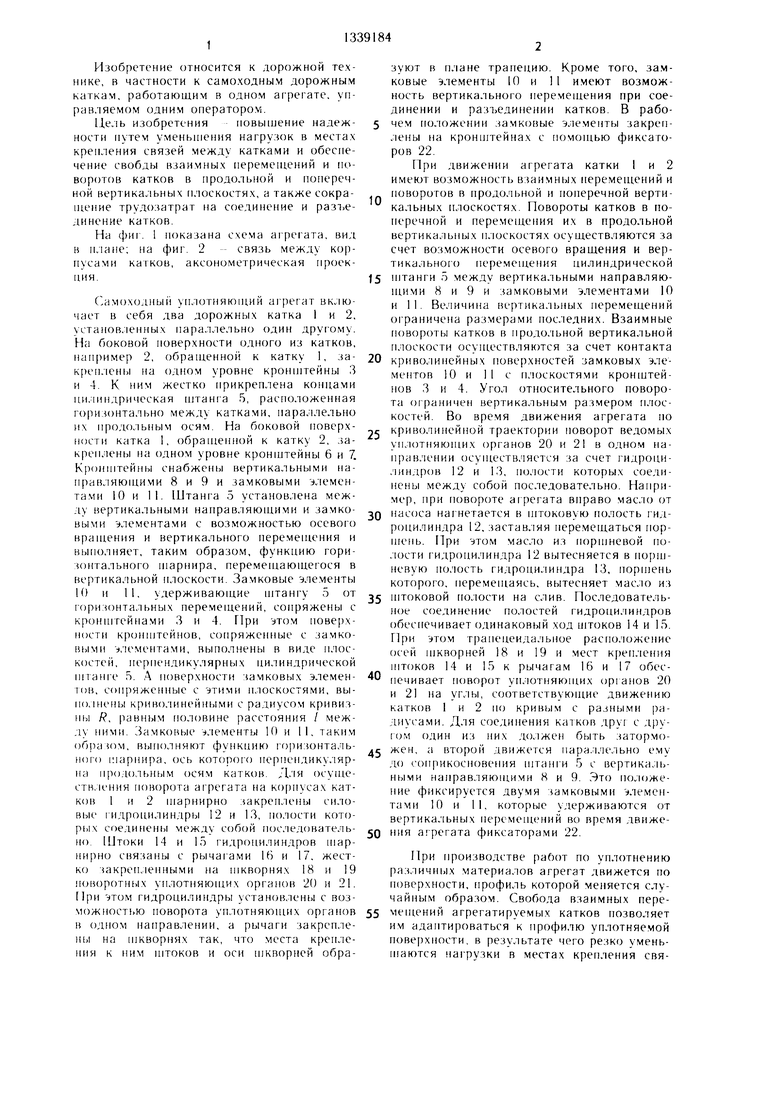
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-поворотное устройство двухосного прицепа | 2022 |
|
RU2792193C1 |
| Подметально-уборочная машина | 1989 |
|
SU1622495A1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2008 |
|
RU2495553C2 |
| Опорно-поворотное устройство двухосного прицепа | 2023 |
|
RU2805576C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| ДОРОЖНАЯ МАШИНА РАЗМИНИРОВАНИЯ | 2002 |
|
RU2210721C1 |
| Универсальное транспортное средство на роторно-винтовом движителе | 2018 |
|
RU2700240C1 |
| Система рулевого управления транспортного средства | 1987 |
|
SU1418158A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
Изобретение относится к дорожным кат- ка.м, работающим в одном агрегате, управляемом одним оператором. Цель изобретения - повышение надежности нутем уменьшения нагрузок в места.х крепления связей между катка.ми и обеспечения свободы взаимны.х перемещений и новоротов катков в продольной и поперечной вертикальных плоскостях. На обрап1енных друг к другу поверхностях корпусов параллельно установленных катков I и 2 закреплены на одном уровне кронштейны 3, 4, 6, 7. Кронн1тей- ны 3, 4 закреплены на катке 2 и снабжены пилиндрической щтангой 5, расположенной горизонтально между катками 1 и 2. Кронп1тейны 6, 7 закреплены на катке I и снабжены вертикальными направляющими и замковыми элементами 10, 11. Штанга г установлена между вертикальными направ- ЛЯЮП1ИМИ и замковыми элементами 10, 1 1 с возможностью осевого врап1,ения и вертикального перемеп1ения и выполняет функцию горизонтального шарнира. Криволинейные поверхности замковых элементов 10, 11 сопряжены с кронп1тейнами 3 и 4 и выполняют функцию поперечного горизонтального П1арнира. На корнусах катков 1, 2 1парнирно закреплены гидроцилиндры 12, 13, полости которых соединены между собой последовательно. Их штоки 14, 15 шарнирно связаны с рычагами 16, 17, закрепленными на 1пкворнях 18, 19 поворотных уплотняющих органов 20, 21. 1 з.п.ф-лы, 2 ил. (Л П 12 21 оэ со со ОО 
| Устройство для формования заготовок | 1987 |
|
SU1484413A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
