1
Изобретение относится к автоматике и может быть использовано в следящих системах, где в качестве исполнительного элемента используется двигатель постоянного тока либо трек- фазный асинхронный двигатель,
Цель изобретения - упрощение и повышение надежности привода.
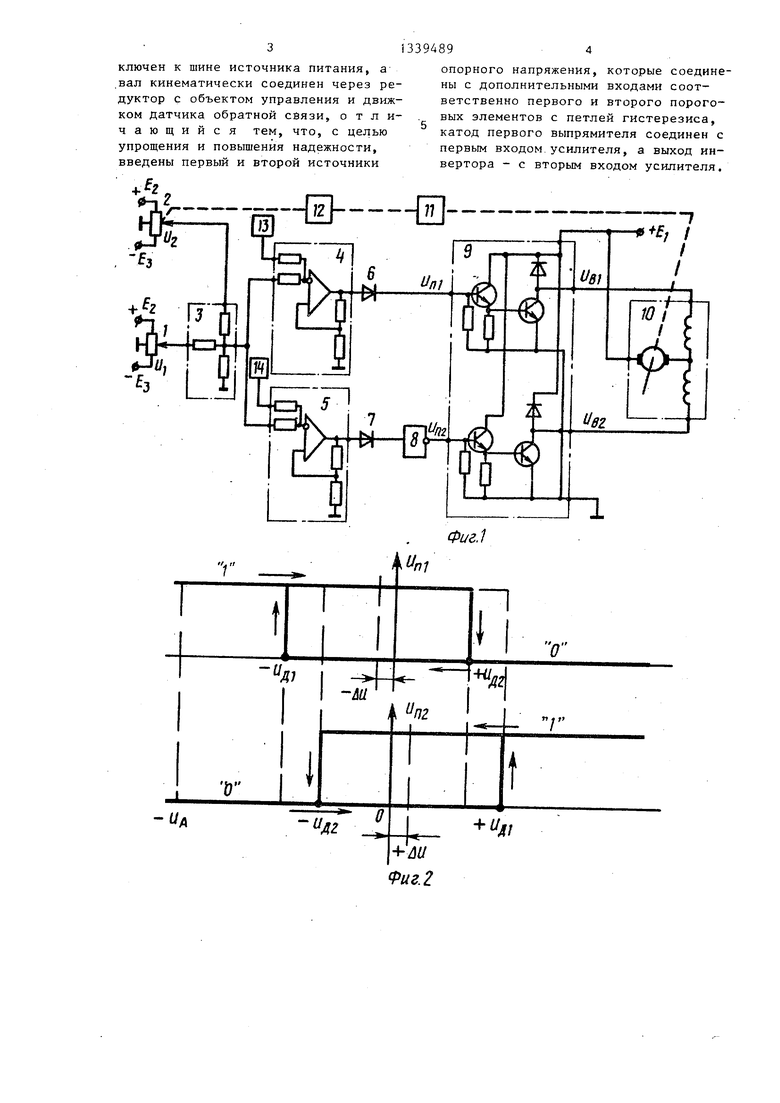
На фиг. 1 приведена схема следящего привода с исполнительным двигателем постоянного тока; на фиг. 2 - статические характеристики пороговых элементов с петлей.гистерезиса (с последовательно включенными выпрямителями и инвертором); на фиг. 3 - временная диаграмма отработки рассогласования приводом.
Следящий привод, содержит задат-, чик 1 и датчик 2 обратной связи, которые могут быть выполнены в виде потенциометров, сумматор 3, первый 4 и второй .5 пороговые элементы с петлей гистерезиса, первый 6 и второй 7 выпрямители, инвертор 8, усилитель 9, двигатель 10 постоянного тока, редуктор 11, объект 12 управления и первый 13 и второй 17 источники опорного напряжения.
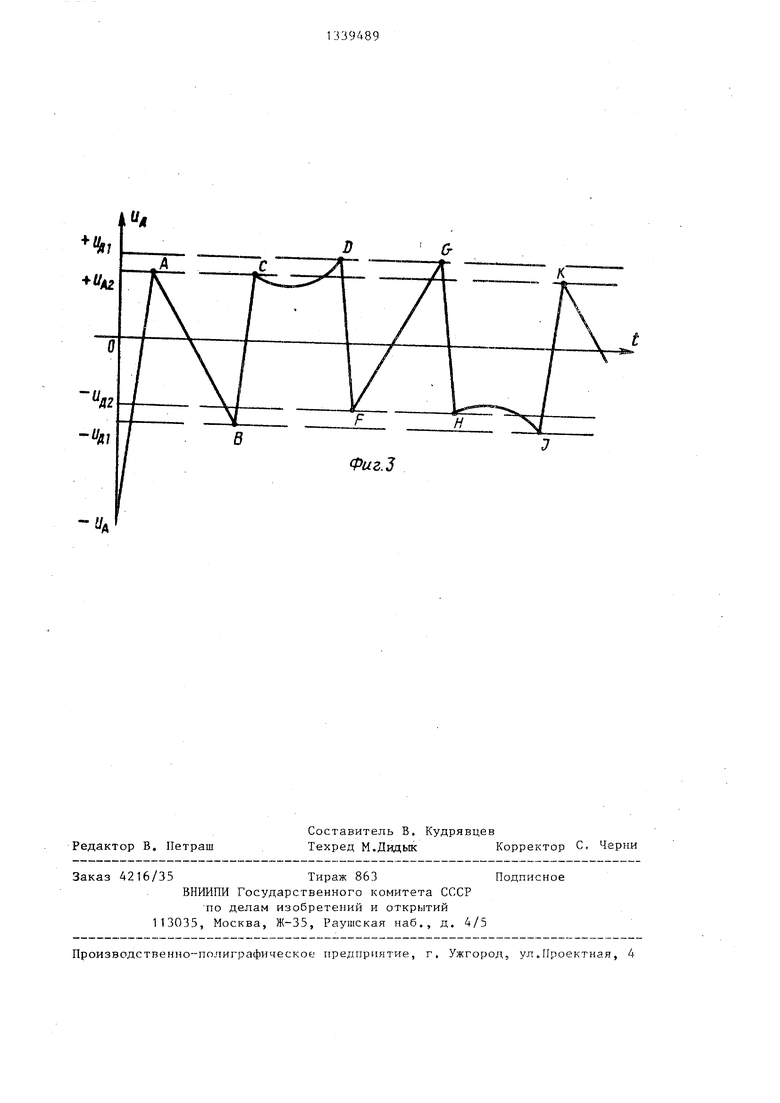
Рассмотрим работу следящего привода при отработке начального рассогласования Цд -ид (фиг. 2 и 3) . На выходе пороговых устройств сигнал „ соответствует уровню логической 1,
и
Ri
- уровню логического О. При этом двигатель 10 приводится во вращение таким образом, чтобы рассогласование и -ид изменялось до величины +U;j. (точка А, фиг. 3). В этот
момент сигнал Up, становится
уровню логического О останавливается.
равным двигатель
Если сигнал рассогласования продолжает изменяться в сторону - Цд, то двигатель остается неподвижным, пока величина рассогласования не станет равной - Пд (точка В, фиг.З). При этом и опять становится равным уровню логической 1, и двигатель вновь отрабатывает рассогласование до величины . когда U, становится равным уровню логического О, при достижении которого двигатель останавливается (точка С,фиг,3). Если характер изменения управляющего воздействия изменяется (участок С-D, фиг. 3), то двигатель остается неподвижным до тех пор, пока величина рас2
не достигнет уровня
5
+ид,. При этом сигнал U f,, становится равным уровню логической 1, двигатель 10 приводится во вращение в противоположную сторону, чтобы рассогласование Цд изменялось до величины - СГд (точка F, фиг. 3).
Если сигнал рассогласования продолжает изменяться в сторону + U, , то двигатель, остается неподвижным, пока величина рассогласования не станет равной + Ид (точка G, фиг. 3), при этом сигнал U, опять принимает уровень логической 1 и -двигатель
0
5
отрабатывает рассогласование до величины - и (точка Н, фиг. 3), Если за счет изменения управляющего воздействия рассогласование будет изменяться до величины -Цд, (точка I, фиг. 3),, то сигнал Un, принимает уровень логической 1 и двигатель отрабатывает это рассогласование до величины +ид (точка К, фиг. 3) и т.д.
Таким образом, ошибка слежения при любом изменении входного воздействия находится в пределах +ид .
Поясняя формирование статических характеристик пороговых устройств с петлей гистерезиса (фиг. 2) следует указать, что они симметричны. Ось симметрии для U,,, сдвинута на величину - ли, создаваемую источником
13опорного напряжения, ось симмет- 5 Рии для Un сд винута на величину
+iU, создаваемую вторым источником
14опорного напряжения..Источники 13 и 14 опорного напряжения подключены к дополнительным входам пороговых элементов 4 и 5 с петлей гистерезиса соответственно.
0
0
Ф
5
ормула изобретения Следящий привод, содержащий двигатель, редуктор, сумматор, усилитель, первый и второй пороговые элементы с петлей гистерезиса, выходы которых соединены соответственно с анодами первого и второго выпрямите- 0 лей, катод второго выпрямителя соединен с инвертором, задатчик и датчик обратной связи, подключенные соответственно к первому и второму входам сумматора, выход которого соединен с входами первого и второго пороговых элементов с петлей гистерезиса, первый и второй выходы усилителя соединены с первым и вторым выводами д-чигателя, третий вывод которого под5
ключей к шине источника питания, а вал кинематически соединен через редуктор с объектом управления и движком датчика обратной связи, отличающийся тем, что, с целью упрощения и повышения надежности, введены первый и второй источники
13394894
опорного напряжения, которые соединены с дополнительными входами соответственно первого и второго пороговых элементов с петлей гистерезиса, катод первого выпрямителя соединен с первым входом усилителя, а выход инвертора - с вторым входом усилителя.
-г/.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1985 |
|
SU1270745A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Следящая система | 1978 |
|
SU697969A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система автоматического направления электрода по стыку свариваемых деталей | 1981 |
|
SU998042A1 |
| Следящая система | 1977 |
|
SU734610A1 |
| Двухканальный цифроаналоговый следящий привод | 1988 |
|
SU1631517A1 |
| Следящая система | 1986 |
|
SU1383286A1 |
Изобретение относится к автоматике и может быть использовано в сле- дяющих системах, где в качестве исполнительного элемента используется двигатель постоянного тока либо трехфазный асинхронный двигатель. Цель изобретения - упрощение и повышение надежности. Для реализации этой цели в следящий привод, содержащий двигатель, редуктор, сумматор, усилитель, первый и второй пороговые элементы с петлей гистерезиса, выходы которых соединены соответственно с анодами первого и второго выпрямителей, катод второго выпрямителя соединен с инвертором, задатчик и датчик обратной связи, подключенные соответственно к первому и второму входам сумматора, выход которого соединен с входами первого и второго пороговых элементов с петлей гистерезиса, первый и второй выходы усилителя соединены с первым и вторым выводами двигателя, третий вьгоод которого подключен к шине источника питания,а вал кинематически соединен через редуктор с.объектом управления и движком датчика обратной связи, введены первый и второй источники опорного напряжения, которые соединены соответственно с дополнительными входами первого и второго пороговых элементов с петлей гистерезиса, катод первого выпрямителя соединен с первым входом усилителя, а выход. инвертора - с вторым Iвходом усилителя.3 ил. с (Л СлЭ 00
Редактор В, Петраш
Составитель В. Кудрявцев
Техред М.Дидьж Корректор С. Черни
Заказ 4216/35Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
ПО делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул.Проектная, 4
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU311248A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящий привод | 1985 |
|
SU1270745A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
