(54) СЛЕДЯЩАЯ СИСТЕМА Изобретение относится к электромеханическим автоматическим системам управления, а именно к следящим системам с бесконтактным двигателем пос тоянного тока, имеющим люфт в силовых редукторах. Известны следящие системы с бесконтактными двигателями постоянного тока (БДПТ), в которых в целях коррекции используются скоростная обратная связь, реализованная на синхронном тахогенераторе, сигнал которой преобразуется в корректирующем устройстве и суммируется с сигналом канала реверса бесконтактного двигатедя постоянного тока 111 , Недостат.г нами таких систем являются статические ошибки и склонность к автоколебаниям, обусловленные наличием люфтов в силовом редуктореа Известны также следящие системы, в которых в целях коррекции используется сигнал, пропорциональный разности положений вхсдного и выхсдного валов силовых редукторов, который преобразуется и суммируется с сигна,лом основного канала управления Г21 я 31. Недостатком этих систем является го , что в них не исключены статические погрешности. Из известных систем наиболее близкой по технической сущности является следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель, первый выпрямитель, первый сумматор, модулятор и исполнительный двигатель, выход которого через редуктор соединен с одним из входов измерителя рассогласования и первым входом второго сумматора и непосредственно - со вторым входом второго сумматора, выхсд которого через дифференциатор и второй выпрямитель подключен ко второму входу первого сумматора, и третий сумматор, первый вход которого подключен к выходу усилителя,а выход через первое реле - ко вхсду реверса исполнительного двигателя C3J, Недостатком известной системл является ее низкая точность. Цель изобретения - повышение статической точности cиcтe ы,, Поо-гавгленная цель достигается тем, что в системе второй вход третьего сумматора соединен со входом корректирующего устройства, которое содержит последовательно соединенные второе реле и дифференциатор.
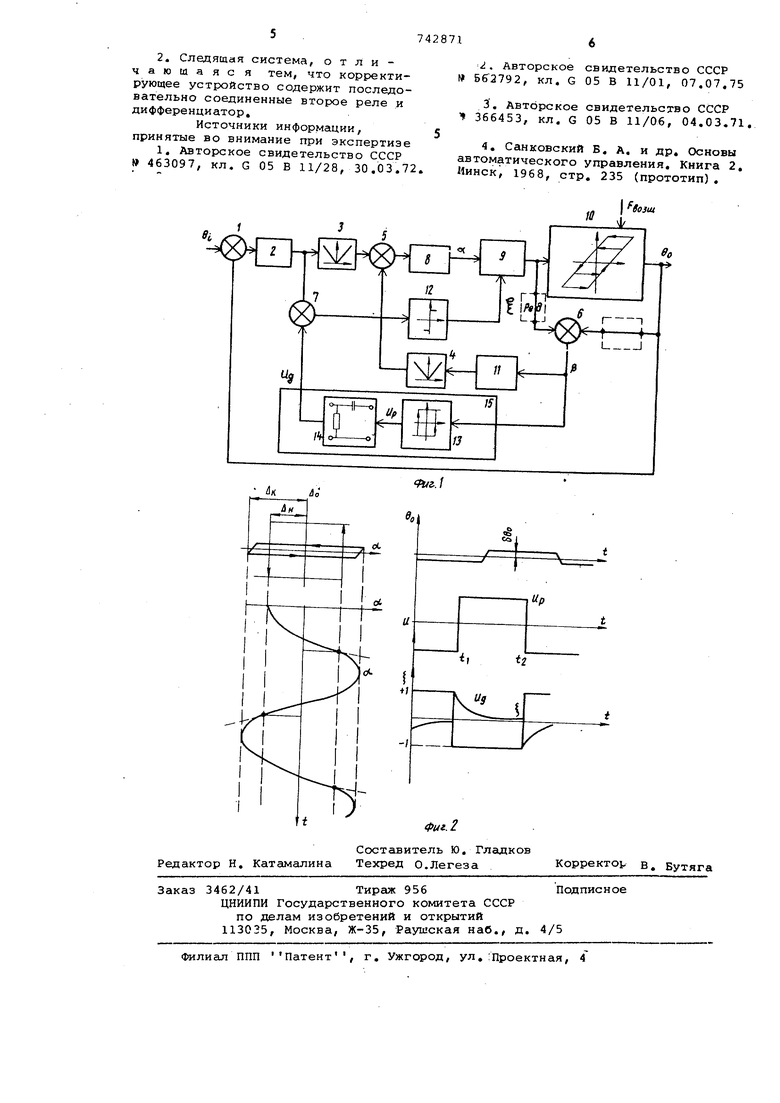
Блок-схема систе иы представлена на фиг, 1, а эпюры напряжений, поясняющие ее работу, представлены на фиг. 2, где приняты следующие обозначения: измеритель рассогласования 1, усилитель 2, первый и второй вып ямитель 3,4, первый, -второй и трети румматоЕМ 5,6,7, модулятор 8, исполНительный двигатель 9, редуктор 10, тахогенератор 11, первое и второе реле 12,13, дифференциатор 14, корректирующее устройство 15, &j -входНой сигнал, Og -выходной сигналов Сигнал рассогласования,J -сигнал ка|1сша реверса исполнительного двига-, еля,иА -выходной сигнал корректирую1дего устройства, Л. - выходной сигнал Модулятора 8, -приведенная разность УГЛОВ поворота входного и выходного Валов редуктора, Дн - зона, нечувствительности реле 13, АХ - зона люфта исполнительного двигателя 10, U,, - выходной сигнал реле 13
Система работает следуюощм образо зом.
В режиме покоя при 6 const в возникают автоколебания благо4даря действию положительной скоростной обратной связи. Параметры сиетемы выбраны так, что при входе испонительного двигателя в зону люфта, то есть при 0р const и равенстве изменений углов на выходе сумматора б и двигателя 9 (3 t внутренний контур неустойчив, двигатель 9 разгоняется, причем благодаря насыщению модулятора 8 разгон происходит по предельной характеристике (кривая оС на фиг. 2) .
В качестве исполнительного двигателя 9 в системе применяется бесконтактный двигатель постоянного тока (БДПТ). Выходной сигнал сумматора б преобразуется корректирующим устройсвом 15, состоящим из реле 13 и дифференциатора 14.
Зона нечувствительности релеВдН выбрана меИЪше зоны люфта АА , то ест и поэтому в некоторый момент
времени при , который наступает раньше, чем двигатель выберет люфт, реле 13 срабатывает. Его выхсдное напряжение Up поступает на вход дифференциатора 14, выходное напряжение которого Цд через сумматор 7 переключает реле 12 канала реверса в положение . Поэтому при t t начинается торможение двигателя 9, которое в момент, когда двигатель 9 выберет люфт полностью, сменяется его движением в обратную сторону, пока в момент времени t . t вновь не сменится торможением. Зона UH выбрана так, .чтобы амплитуда автоколебаний была несколько
оольше зоны люфта и выходной угол системы с точностью до сколь угодно малой величины колебаний выхсдн.ой оси редуктора 6 был равен входному углу 6 ,
Таким образом благодаря автоколебаниям внутри зоны люфта положение выходного редуктора 10 с люфтом соответствует положению входного вала, то есть в предлагаемой системе исключена статическая ошибка, обусловленная люфтом, и сведены к нулю автоколебания его выходного вала.
При работе системы в режиме слежения под действием сигнала рассогласования двигатель 9 развивает движущий момент, выбирает люфт. Как только устанавливается постоянное сцепление между всеми шестернями редуктора, выходной сигнал сумматора б становится равным нулю благодаря выбранным коэффициентам передачи, В связи с тем, что напряжение на выходе тахогенератора 11 равно нулю, перестает действовать цепь внутренней положительной обратной связи, и автоколебания прекращаются. При этом благодаря дифференциатору 14 в установившемся режиме напряжение ид О и н препятствует переключению реле 12 канала реверса под действием сигнала рассогласования Q ,
Таким образом, в предложенной системе за счет автоколебаний в зоне люфта силового редуктора исключены статистическая ошибка и автоколебания выходного вала, причем автоколебания срываются в режиме слежения привода и не ПРИПЯТСТВУЮТ его нормальной работе. Благодаря действию положительной скоростной обратной связи уменьшается также время прохождения люфта двигателем при реверсах последнего, что уменьшает также ошибки слежения.
Формула изобретения
1, Следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель, первый выпрямитель, первый сумматор, модулятор и исполнительный двигатель выход которого через редуктор соединен с сяним из входов измерителя рассогласования и первым входом второго сумматора и непосредственно со вторым входом второго сумматора, выход которого через дифференциатор и второй выпрямитель подключен ко второму входу первого сумматора, и третий сумматор, первый вход которого подключен к выходу усилителя, а выхад - через первое реле - ко входу реверса исполнительного двигателя, отличающаяс я тем, что, с целью повышения статистической точности системы, в ней второй вхс« третьего сумматора соединен со входом корректирующего, устройства,
2. Следящая система, о т л и чаюшаяс я тем, что корректирующее устройство содержит последовательно соединенные второе реле и дифференциатор.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 463097, кл. G 05 В 11/28, 30.03.72.
2. Авторское свидетельство СССР W 562792, кл. G 05 В 11/01, 07.07.75
3. Авторское свидетельство СССР 366453, кл. G 05 В 11/06, 04.03.71.
4. Санковский Б. А. и др. Основы автоматического управления. Книга 2. Минск, 1968, стр. 235 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU746405A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |
| Следящая система | 1975 |
|
SU545969A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Следящая система | 1979 |
|
SU900255A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
