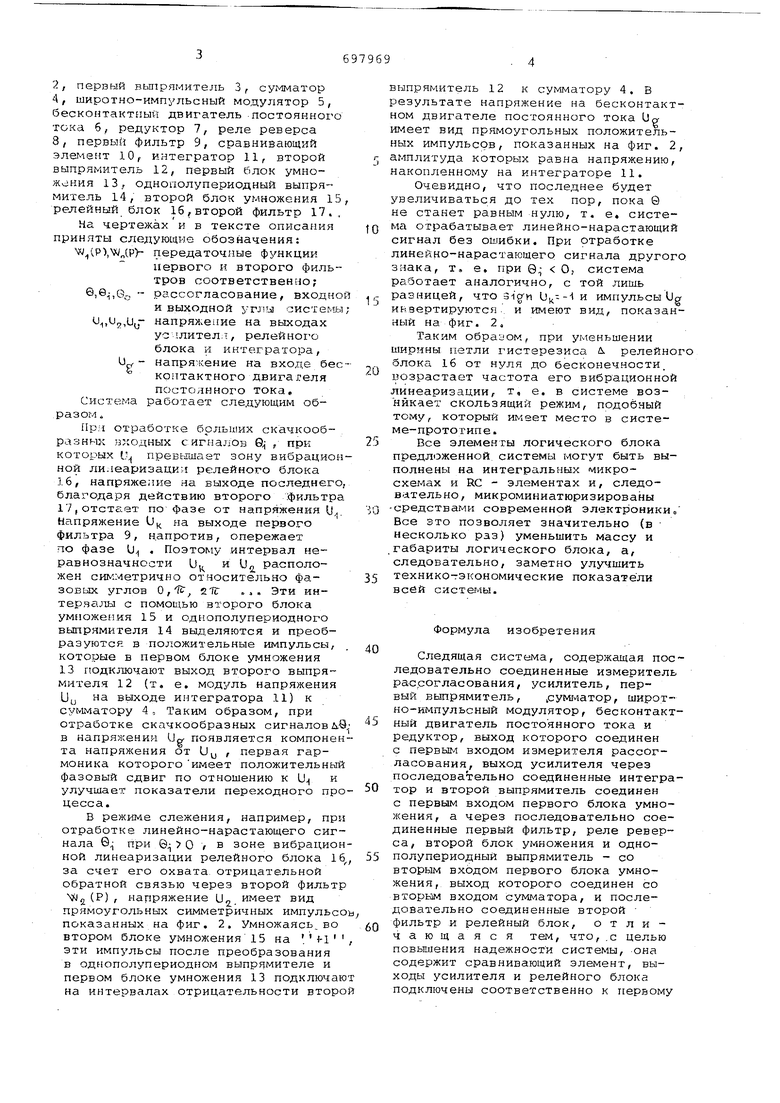
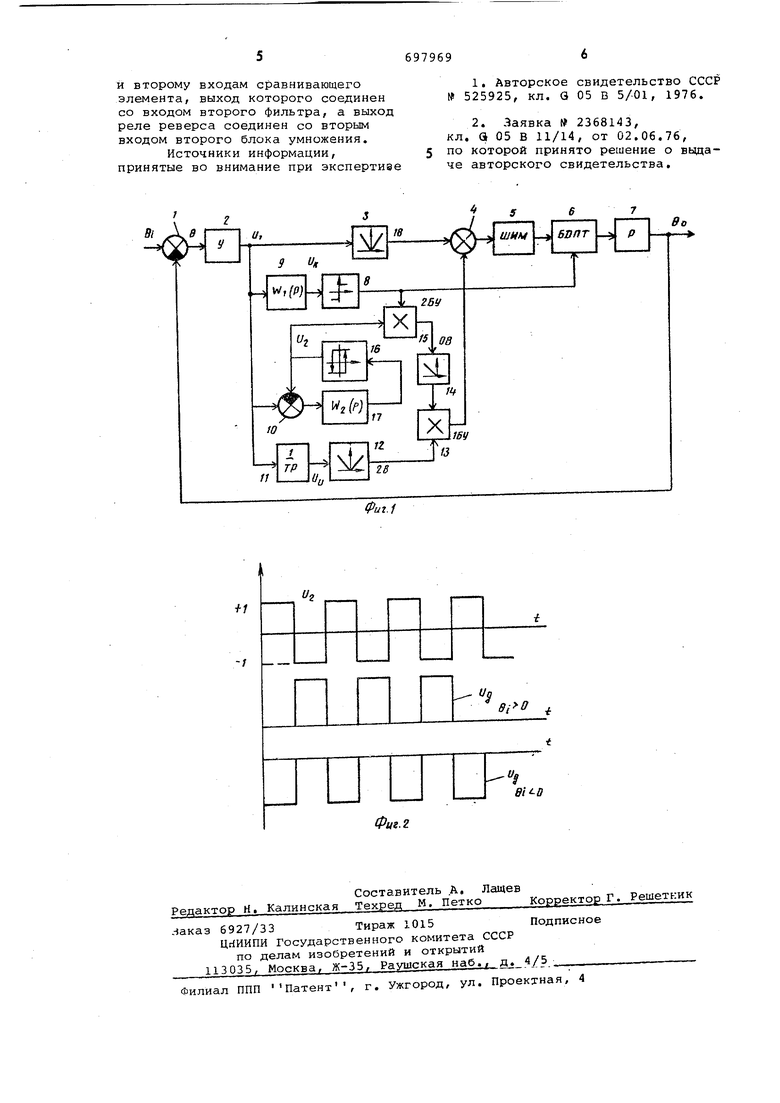
(54) СЛЕДЯЩАЯ СИСТЕМА 2, перв1 й вьтрямитель 3 сумматор 4, широтно-импульсный модулятор 5, бесконтактный двигатель постоянного тока б, редуктор 7, реле реверса 8, первый фильтр 9, сравнивающий 10,. интегратор 11, второй выпрямитель 12, первый блок умножения 13, однополупериодный выпрямитель 14, второй блок умножения 15 релейный блок 16,второй фильтр 17., На чертежах и в тексте описания приняты следующие обозначения: ) передаточные функции аервого и второго фильтров соответственно; Q,,Gc - рассогласование, входно и выходной углы системы Ц,02, напряжение на выходах усчлител;(, релейного блока и инт€ гратора, напряжение на входе бес контактного двигателя постоянного тока, Система работает следующим образом . При отработке больших скачкообразны : входных сигналов QJ , при которых и превышает зону вибрацион ной лилеаризации релейного блока 16, напряжение на выходе последнего благодаря действию второго фильтра 17,отстает по фазе от напряжения U,j Напряжение U, на выходе первого фильтра 9, напротив, опережает по фазе и . Поэтому интервал неи и 2 рас пол оравнозначности U жен симметрично относительно фазовых углов 0,7t g-JT „ ., , Эти интервалы с помощью второго блока умножения 15 и oд oпoлyпepиoднoгo выпрямителя 14 вьщеляются и преобразуются в положительные импульсы, которые в первом блоке умножения 13 подкл-шчают выход второго выпрямителя 12 (т, е. модуль напряжения Uu на выходе интегратора 11) к сумматору 4, Таким образом, при отработке скачкообразных сигналов д.9 в напряжении Up- появляется компонен та напряжения от Uy , первая гармоника которого имеет положительный фазовый сдвиг по отношению к U и улучшает показатели переходного пр цесса. В режиме слежения, например, пр отработке линейно-нарастающего сиг нала 6 при © О V в зоне вибрацио ной линеаризации релейного блока 1 за счет его охвата, отрицательной обратной связью через второй фильт У2 (Р) I напряжение U,j. имеет вид прямоугольных симметричных импульс показанных на фиг. 2. Умножаясь, во втором блоке умножения 15 на . импульсы после преобразования в однополупериодном выпрямителе и первом блоке умножения 13 подключа на интервалах отрицательности втор ыпрямитель 12 к сумматору 4, В езультате напряжение на бесконтактом двигателе постоянного тока Uoмеет вид прямоугольных положительых импульсрв, показанных на фиг. 2, мплитуда которых равна напряжению, акопленному на интеграторе 11. Очевидно, что последнее будет величиваться до тех пор, пока 0 е станет равным нулю, т. е. систеа отрабатывает линейно-нарастающий игнал без ошибки. При отработке инейно-нарастающего сигнала другого, знака, т. е, при 6 О, система аботает аналогично, с той лишь разницей, что к- и импульсы Ug ив,вертируются , и имеют вид, показанный на фиг. 2, Таким образом, при уменьшении ширины петли гистерезиса л. релейного блока 16 от нуля до бесконечности, возрастает частота его вибрационной инеаризации, т, е. в системе возникает скользящий режим, подобный тому, который имеет место в системе-прототипе. Все элементы логического блока предложенной, системы могут быть выполнены на интегральных микросхемах и RC - элементах и, следовательно, микроминиатюризированы средствами современной электроники/ Все это позволяет значительно (в несколько раз) уменьшить массу и габариты логического блока, а, следовательно, заметно улучшить технико-экономические показатели всей системы. Формула изобретения Следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель, первый выпрямитель, jcyMiviaTop, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока и редуктор, выход которого соединен с первым входом измерителя рассогласования, выход усилителя через последовательно соединенные интегратор и второй выпрямитель соединен с первым входом первого блока умножения, а через последовательно соединенные первый фильтр, реле реверса, второй блок умножения и однополупериодный выпрямитель - со вторым входом первого блока умножения, выход которого соединен со вторым входом сумматора, и последовательно соединенные второй фильтр и релейный блок, отличающаяся тем, что, ,с целью повышения надежности системы, она содержит сравнивающий элемент, выходы усилителя и релейного блока подключены соответственно к первому
и второму входам сравнивающего элемента, выход которого соединен со входом второго фильтра, а выход реле реверса соединен со вторым входом второго блока умножения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 525925, кл. Q 05 В 5/01, 1976.
2.Заявка 2368143,
кл. а 05 В 11/14, от 02.06.76, по которой принято решение о вьщаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| Следящая система | 1976 |
|
SU641399A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |
У,
S
