Изобретение относится к автоматн- ческим импульсным регуляторам, выходным сигналом которых является серия модулированных по частоте элект рических импульсов, и может быть применено для регулирования различных процессов в теплоэнергетике, химии и других отраслях промышленности при наличии чистого запаздывания в контуре регулирования, когда время запаздывания меньше по величине длительности импульсов управления .
Цель изобретения - расширение области применения частотно-импульсного регулятора.
На фиг. 1 представлена блок-схема частотно-импульсного регулятора; на фиг. 2 - временные зависимости основных управляющих и корректирующих сигналов в процессе работы; на фиг,3 структурная схема регулятора в составе системы автоматического регулирования .
Частотно-импульсный регулятор содержит сумматоры 1 и 2, задатчик 3
регулируемого параметра, двухканаль- ный частотно-импульсный модулятор 4, одновибраторы 5 - 10, усилители 11 и 12 мощности, элементы НЕ 13 и 14, элементы ИЛИ 15 и 16, модуль 17 объекта без запаздывания, исполнительный механизм 18.
30
Частотно-импульсный модулятор сое тоит из интегратора 19, несимметричных релейных элементов 20 .и 21, элемента ИЛИ 22, одновибратора 23 и ключевого элемента 24,
Принятые обозначения: Ugx сигнал с выхода датчика регулируемого параметра; и, - сигнал с выхода задатчи- ка регулируемого параметра; U.j - сигнал с выхода интегратора 19; U, U - сигналы с выходов соответственно релейных элемеЕ1тов 20 и 21; Ug , U - сигналы с выходов соответственно од- новибраторов 5 и 6; - сигнал с выхода одновибратора 23; U - сигнал с выхода элемента ИЛИ 22; IJ,g, U „ - сигналы с выходов соответственно элементов ИЛИ 15 и 16; и,2 сигнал на выходе сумматора 2; U, - сигнал на выходе модели 17 объекта управления; У - длительность импульсов управления регулятора; - величина чистого запаздывания в контуре регулирования; W|,(S) - передаточная функция (ПФ)
интегратора мо;1У-51ятора;
НЭ
ныи элемент вида квантователь приращений , характеризующий квант ование сигнала по уровню в частотно-импульсJ. ном модуляторе; и - порог срабаты- вания релейных элементов модулятора 20 и 21; и - амплитуда импульсов на выходе регулятора; (1-е ) - ПФ, характеризующая работу одновибраторов
10 5 и 6; Wg(S)e - ПФ объекта управления; 1 - - ПФ, характеризующая работу одновибраторов 7 - 10, элементов ИЛИ 15 и 16 и сумматора 2; W(S) - ПФ объекта управления без за15 паздывания (модель объекта).
Регулятор работает следующим образом.
На вход регулятора поступает сигнал и gj от датчика 25 регулируемого .
2Q параметра и сравнивается в сумматоре 1 с сигналом и, от задатчика 3. В случае, если сигнал рассогласования равен О, на выходах регулятора отсутствуют управляющие сигналы и
25 система находится в положении равновесия. При изменении сигнала задания или при возникновении возмущения в контуре системы автоматического регулирования возникает сигнал рассогласования U2 . Если, например, значение регулируемого параметра меньше заданного значения, то сигнал U,, имеет положительное значение. Сигнал U2 интегрируется и инвертируется интегратором 19 и поступает на входы не- . симметричных релейных элементов 20 и 21. При достижении сигналом Ug на выходе интегратора порога срабатывания л одного из релейных элементов происходит его срабатывание (например, релейного элемента 21). На его выходе возникает сигнал U,., по переднему фронту которого происходит запуск одновибраторов 6 и 10. Одновременно по переднему фронту сигнала IJj , поступающего с выхода элемента ИЛИ . 22, происходит запуск одновибратора 23 .
Одновибратором 23 формируются пре- 50 дельно короткие импульсы U , вызывающие срабатывание ключевого элемента 24 и обнуление интегратора 19, , После сброса до О сигнала U схема восстанавливается, вновь начинается gg изменение сигнала U;. до следующего срабатывания релейного элемента 20 и.чи 21. Одновибратором 6 формируются импульсы управления длительностью J , нелиией- проходящие через усилитель 12 мощнос- 35
40
45
31339490
и на одну из обмоток исполнительноо механизма 18, вызывая увеличение егулируемого параметра. Одновибрато- ом 10 формируется корректирующий мпульс длительностью , равный зааздыванию в системе регулирования, оступающий через элемент ИЛИ 16 на люсовой вход сумматора 2, С выхода
не вх св па пе ро ко пе дв мо ко ст то да го ю ре пу те ви НЕ вт зап одн пер нов чен одн вог рог виб ход рог виб рат вом рой тре го ны вхо ног без нен
сумматора 2 сигнал U, поступает на вход модели 17 объекта, а с выхода модели корректирующий сигнал поступает на второй отрицательный вход сумматора 1 в виде напряжения U,-.
В дальнейщем описанный процесс повторяется и на выходе регулятора формируется последовательность прямоугольных импульсов управления с тем отличием в последующих циклах, что по окончании импульса ) происходит запуск одновибратора 9, а при изменении полярности сигнала рассогласования происходит срабатывание одно- вибраторов 5, 7 и 8.
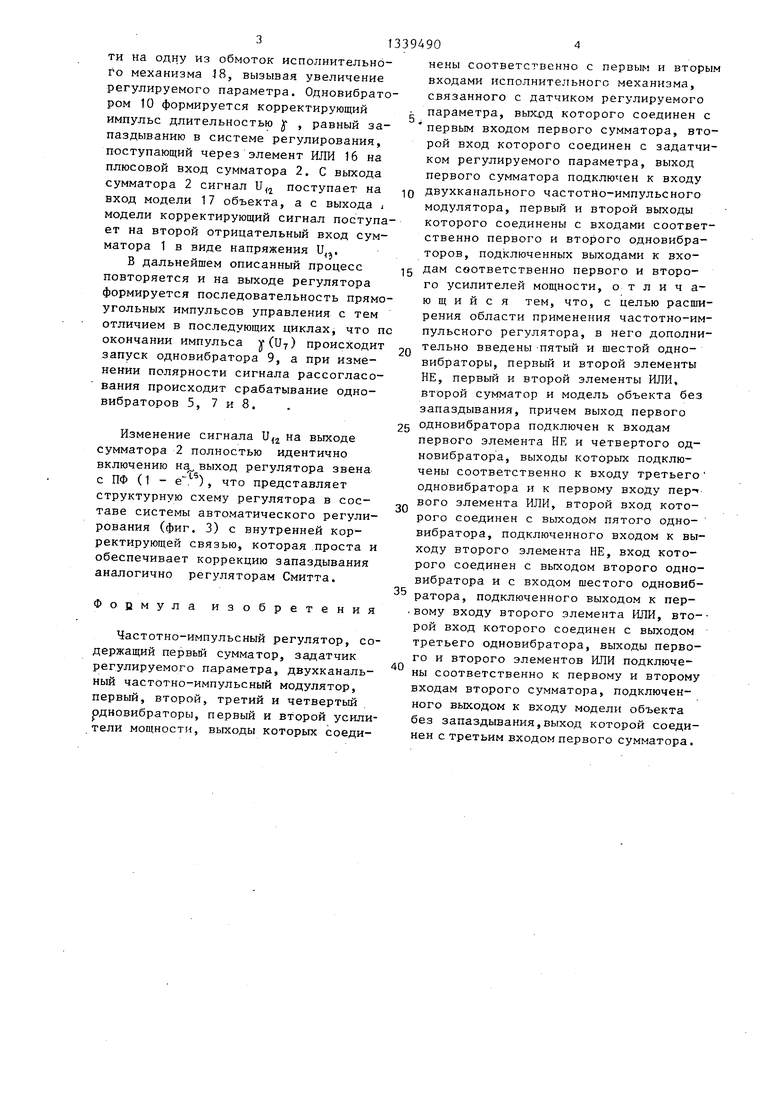
Изменение сигнала U сумматора 2 полностью
12 на выходе идентично
включению на выход регулятора звена с ПФ (1 - е, ) , что представляет структурную схему регулятора в составе системы автоматического регулирования (фиг. 3) с внутренней корректирующей связью, которая проста и обеспечивает коррекцию запаздывания аналогично регуляторам Смитта.
Формула изобретения
Частотно-импульсный регулятор, содержащий первый сумматор, задатчик регулируемого параметра, двухканаль- ный частотно-импульсный модулятор, первый, второй, третий и четвертый рдновибраторы, первый и второй усилители мощности, выходы которых соеди0
5
0
5
0
5
0
нены соответственно с первым и вторым входами исполнительного механизма, связанного с датчиком регулируемого параметра, выход которого соединен с первым входом первого сумматора, второй вход которого соединен с задатчи- ком регулируемого параметра, выход первого сумматора подключен к входу двухканального частотно-импульсного модулятора, первый и второй выходы которого соединены с входами соответственно первого и второго одновибра- торов, подключенных выходами к входам соответственно первого и второго усилителей мощности, о т л и ч а- ю щ и и с я тем, что, с целью расширения области применения частотно-импульсного регулятора, в него дополнительно введены -пятый и шестой одно- вибраторы, первый и второй элементы НЕ, первый и второй элементы ИЛИ, второй сумматор и модель объекта без запаздывания, причем выход первого одновибратора подключен к входам первого злемента НЕ и четвертого одновибратора, выходы которых подключены соответственно к входу третьего одновибратора и к первому входу пер- вого элемента ИЛИ, второй вход которого соединен с выходом пятого одно- вибратора, подключенного входом к выходу второго злемента НЕ, вход которого соединен с выходом второго одно- вибратора и с входом шестого одновибратора, подключенного выходом к первому входу второго элемента ИЛИ, вто- рой вход которого соединен с выходом третьего одновибратора, выходы первого и второго элементов ИЛИ подключены соответственно к первому и второму входам второго сумматора, подключенного выходом к входу модели объекта без запаздывания, которой соединен с третьим входом первого сумматора.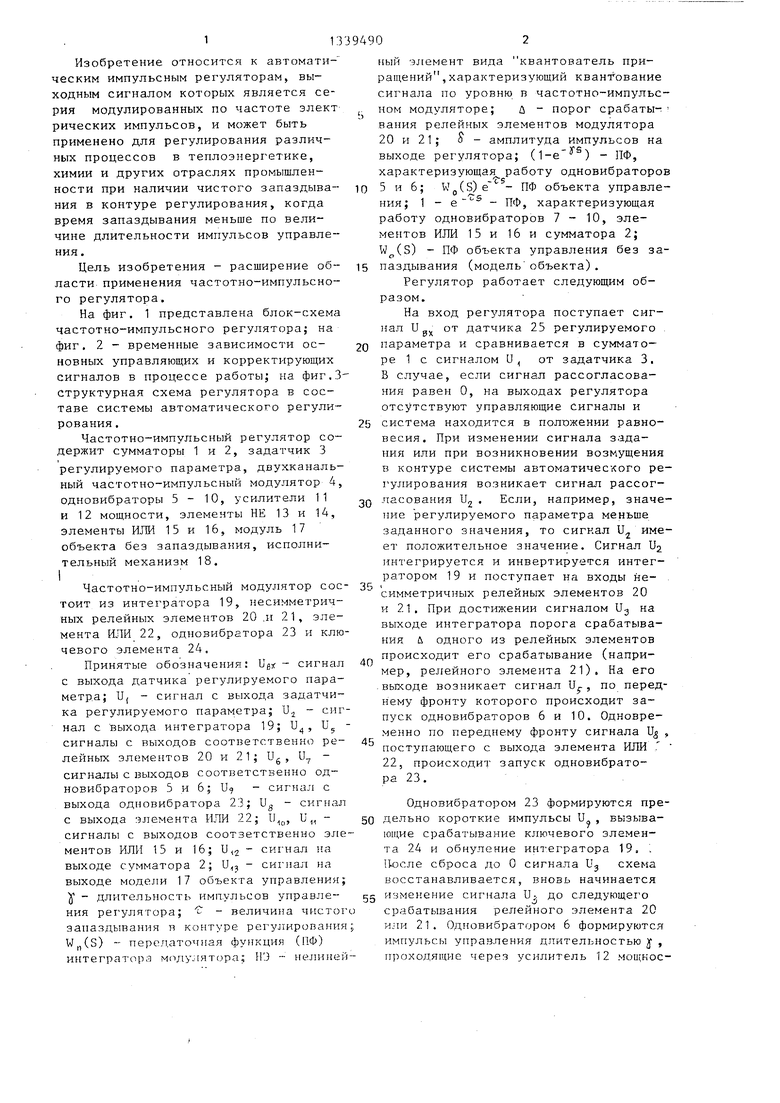
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Частотно-импульсный регулятор | 1984 |
|
SU1238028A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1339491A1 |
| Импульсный регулятор | 1984 |
|
SU1251025A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Частотно-импульсный регулятор | 1983 |
|
SU1096608A1 |
Изобретение относится к автоматическим импульсным регуляторам и может быть применено для регулирования различных процессов в различных отраслях промьгашенности при наличии чистого запаздывания в контуре регулирования, когда время запаздывания меньше по величине длительности импульсов управления. Цель изобретения - расширение области применения частотно-импульсного регулятора. Устройство содержит датчик 25 и задаТчик 3 регулируемого параметра, сумматоры 1 и 2, двухканальный частотно-импульсный модулятор 4, одновибраторы 5, 6, 7, 8, 9, 10, усилители мощности 1 1 и 12, элементы НЕ 13 и 14, элементы ИЛИ 15 и 16, модель объекта .без запаздывания 17, исполнительный механизм 18. В устройстве обеспечивается .коррекция запаздывания аналогично коррекции в регуляторах Смитта для случая импульсного регу- лирования. 3 ил. (Л с: со со со со ГЧ % Фаг.1
| Импульсный регулятор | 1981 |
|
SU1004969A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Частотно-импульсный регулятор | 1983 |
|
SU1096608A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
