Н )(1бретение относится к промышленному транспорту и касается сцепного устройства метаплургических платформ Ш1Я транспортиронанпя слитков и изложниц.
Цель :зоГ)ре 1ч: ния - повышение надежности работы.
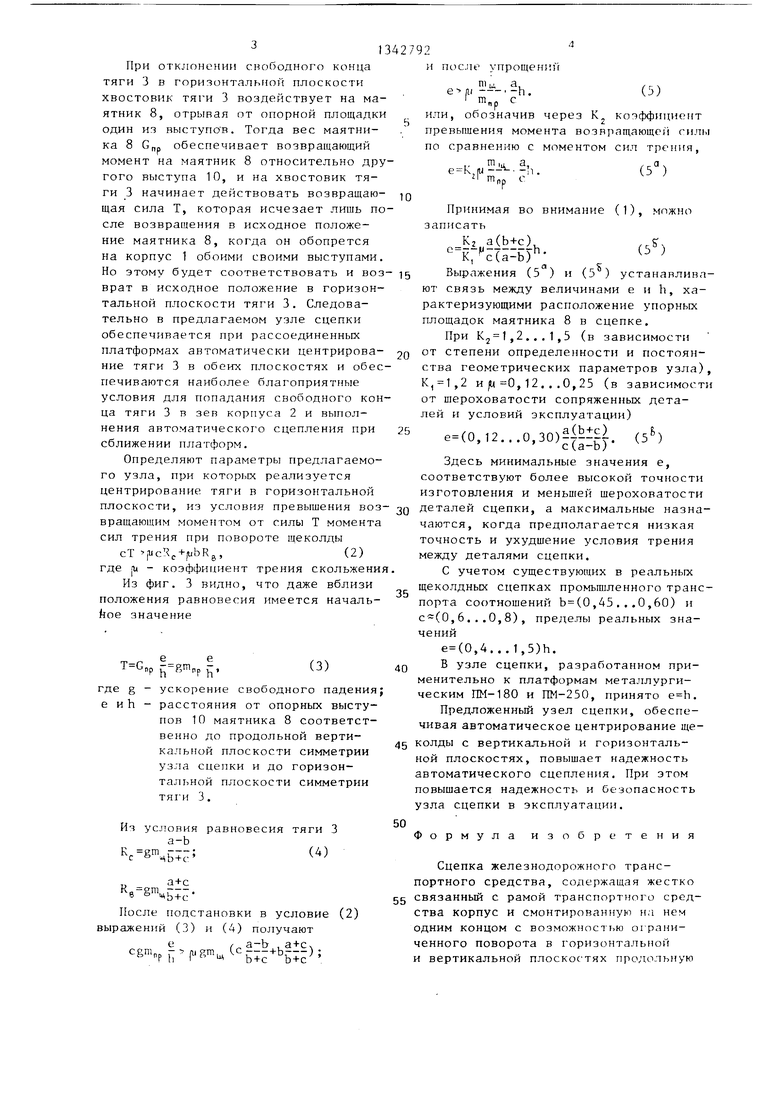
На фиг. 1 показан узел сцепки, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1 .
Узел сцепки включает корпус 1 и корпус 2, продольную тягу 3 с двумя отверстиями, через одно из которых проходит палец 4, закрепленный в корпусе 1 при помощи планки 5, а через другое - управляемый палец 6 удерживаемый в корпусе 2 при помощи
рычагов 7 управления сцепкой, и цент- 2о ниях (либо поворотах в плоскости XOY) рирующее устройство в виде маятника 8. тяга 3 поворачивается относительно Маятник 8 охватывает хвостовую пальца 4 на некоторый угол ( , перемещает точку контакта своего хвостовика с проемом маятника 8 на величи- 25 ну f, а маятник 8 при этом, упираясь в скос 11 корпуса 1, поворачивается на угол ОС относительно одного из своих опорных выступов 10. Наличие скосов 9 в проеме маятника 8 сделало выполнении хвостовика тяги 3 цилинд- зо возможным поворот без заклинивания
часть тяги 3 за глухим пальцем 4, причеи соединение маятника 8 с хвостовиком тяги 3 выполнено с возможностью их относительных поворотов (относительно осей X, Y, Z) и относительного перемещения вдоль оси X тяги 3. Это реализуется, например, при
в плоскости YOZ хвостовика тяги 3 относительно маятника 8.
рическим, а проема маятника - удлиненным книзу от хвостовика тяги 3 и со скосами 9 в плоскости XOY. Маятник 8 вставлен в вертикальный проем корпуса 1 и опирается на него по выступам 10, расположенным ниже плоскости Q . контакта тяги 3 с корпусом 1 и по разные стороны от вертикальной продольной плоскости симметрии узла сцепки (плоскости XOZ) .
Выемка в корпус 1 под опорные выступы 10 маятника 8 выполняется предпочтительно со скосами 11, ограничивающими возможность поперечного (вдоль оси У) смещения маятника 8 от носительно корпуса 1, но не препятствующими поворота маятника 8 на необходимый угол в плоскости YOZ относительно любого из опорных выступов 10. Для обеспечения собираемости узла в представленном его исполнении манник 8 выполнен разборным, с грузом, присоединяемым в его нижней части. Сборка узла предусматривает последовательно установку маятника 8 (без нижнего груза) в проем корпуса и закрепление груза на маятнике 8; введение тяги 3 в зев корпуса 1, а хвостовика тяги 3 - в проем маятни
ка 8; установку глухого пальца 4 и закрепление егй планкой 5.
В процессе движения железнодорожных платформ сцепка допускает возможные при этом вертикальные и поперечные относительные смещения и относительные повороты корпусов 1 и 2 без деформаций либо заклиниваний элементов сцепки. Действительно, при вертикальных смещениях корпусов 1 и 2 пальцы 4 и 6, зафиксированные соответственно планкой 5 и рычагами 7, остаются неподвижными относительно
своих корпусов, а тяга 3 поворачивается относительно корпусов 1 и 2 и пальцев 4 и 6 в плоскости XOZ, приподнимая при этом своим хвостовиком маятник 8. При горизонтальных смеще-
ниях (либо поворотах в плоскости XOY) тяга 3 поворачивается относительно пальца 4 на некоторый угол ( , перемещает точку контакта своего хвостовика с проемом маятника 8 на величи- ну f, а маятник 8 при этом, упираясь в скос 11 корпуса 1, поворачивается на угол ОС относительно одного из своих опорных выступов 10. Наличие скосов 9 в проеме маятника 8 сделало возможным поворот без заклинивания
где m
в плоскости YOZ хвостовика тяги 3 относительно маятника 8.
При рассоединенных платформах тяга 3 остается установленной в корпусе 1 с глухим пальцем 4. При этом провисание свободного конца тяги 3, при котором происходит ее поворот относительно края а зева корпуса 1, прекращается после упора хвостовика тяги 3 в верхнюю часть проема маятника 8, так как масса маятника 8 наде m
начается из условия переуравновешиания им тяги 3 (фиг. 1)
тг а-Ь.., ч
,,(1)
пр ,р ит
а, b и с
Ь+си т,., - масса соответственно маятника 8 и тяги 3; расстояния от оси пальца 4 соответственно до центра массы тяги 3, до края а зева корпуса 1, до центра массы маятника 8;
К, - коэффициент переуравновешивания, который практически достаточно, с учетом возможньк неточностей размеров деталей, принять К,1,2.
При отклонении свободного конца тяги 3 в горизонтальной плоскости хвостовик тяги 3 воздер ствует на маятник 8, отрывая от опорной площадки один из выступав. Тогда вес маятника 8 С„р обеспечивает возвращающий момент на маятник 8 относительно другого выступа 10, и на хвостовик тяги 3 начинает действовать возвращаю- щая сила Т, которая исчезает лишь после возвращения в исходное положение маятника 8, когда он обопрется на корпус 1 обоими своими выступами. Но этому будет соответствовать и воз врат в исходное положение в горизонтальной плоскости тяги 3. Следовательно в предлагаемом узле сцепки обеспечивается при рассоединенных платформах автоматически центрирова- ние тяги 3 в обеих плоскостях и обеспечиваются наиболее благоприятные условия для попадания свободного конца тяги 3 в зев корпуса 2 и выполнения автоматического сцепления при сближении платформ.
Определяют параметры предлагаемого узла, при которых реализуется центрирование тяги в горизонтальной
вращающим моментом от силы Т момента сил трения при повороте щеколды
сТ |iic4 +pbRg,(2)
где РД - коэффициент трения скольжения
Из фиг. 3 видно, что даже вблизи положения равновесия имеется началь- йое значение
35
плоскости, из условия превышения воз- ц деталей сцепки, а максимальные назначаются, когда предполагается низкая точность и ухудшение условия трения между деталями сцепки.
С учетом существующих в реальных щеколдных сцепках промышленного транспорта соотношений Ь(0,43. . .0,60) и с(0,6...0,8), пределы реальных значений
e(0,4...1,3)h.
В узле сцепки, разработанном применительно к платформам металлургическим ПМ-180 и ПМ-250, принято . Предложенный узел сцепки, обеспечивая автоматическое центрирование ще- 45 колды с вертикальной и горизонтальной плоскостях, повышает надежность автоматического сцепления. При этом повышается надежность и безопасность узла сцепки в эксплуатации.
Т-С„р f;-gm,p j,
(3)
40
где g е и h
ускорение свободного падения; расстояния от опорных выступов 10 маятника 8 соответственно до продольной вертикальной плоскости симметрии узла сцепки и до горизонтальной плоскости симметрии тяг и 3.
Из
условия равновесия а-Ь
c g bTc
7) + С
Кв 8 11цьТсПосле подстановки в условие выражений (3) и (4) получают
а-Ь , а+с, Ь+с Ь+с
е / а-Ь , а+Сч
cgn4pf; Sm(c---4-b---);
после упрощени1г т и. а.
е - (I- . -h . т„р с
или, обозначив через К,
превышения момента возвращающей силы
по сравнению с моментом сил трения,
(5) коэффициент
f
. 2| гппл с
(З )
Принимая во внимание (1), можно записать
Кг а(Ь+с)
е --и-7-Гч-п.
К, с(а-Ь;
Выражения (5 )
(5
(зЪ
и (э ) устанавливают связь между величинами е и h, характеризующими расположение упорных площадок маятника 8 в сцепке.
При ,2...1,5 (в зависимости от степени определенности и постоянства геометрических параметров узла), ,2 и |u 0,12. . .0, 23 (в зависимости от шероховатости сопряженных деталей и условий эксплуатации)
е(0,12...0,30)(}. (5
Здесь минимальные значения е, соответствуют более высокой точности изготовления и меньшей шероховатости
35
45
40
50
Формула изобретения
Сцепка железнодорожного транспортного средства, содержащая жестко 55 связанный с рамой транспортного средства корпус и смонтированную на нем одним концом с возможностью ограниченного поворота в горизонтальной и вертикальной плоское тях продольную
тягу, другой конец которой расположен вне корпуса, центрирующее устройство, кинематически связанное с одним концом продольной тяги, о т- личающаяся тем, что, с целью повышения надежности работы, центрирующее устройство включает в
себя перемещающийся в поперечной плоскости маятник, охватывающий один конец продольной тяги и опирающийся симметричными выступами на выступы корпуса, расположенные ниже плоскости контакта указанной продольной тяги с корпусом.
А-А
в
Редактор А.Шандор
Составитель С.Романов Техред М.Ходанич
Заказ 4592/18 Тираж 455Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий , Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г .Ужгород, ул.Проектная, 4
u-a.J
Корректор Л.Патай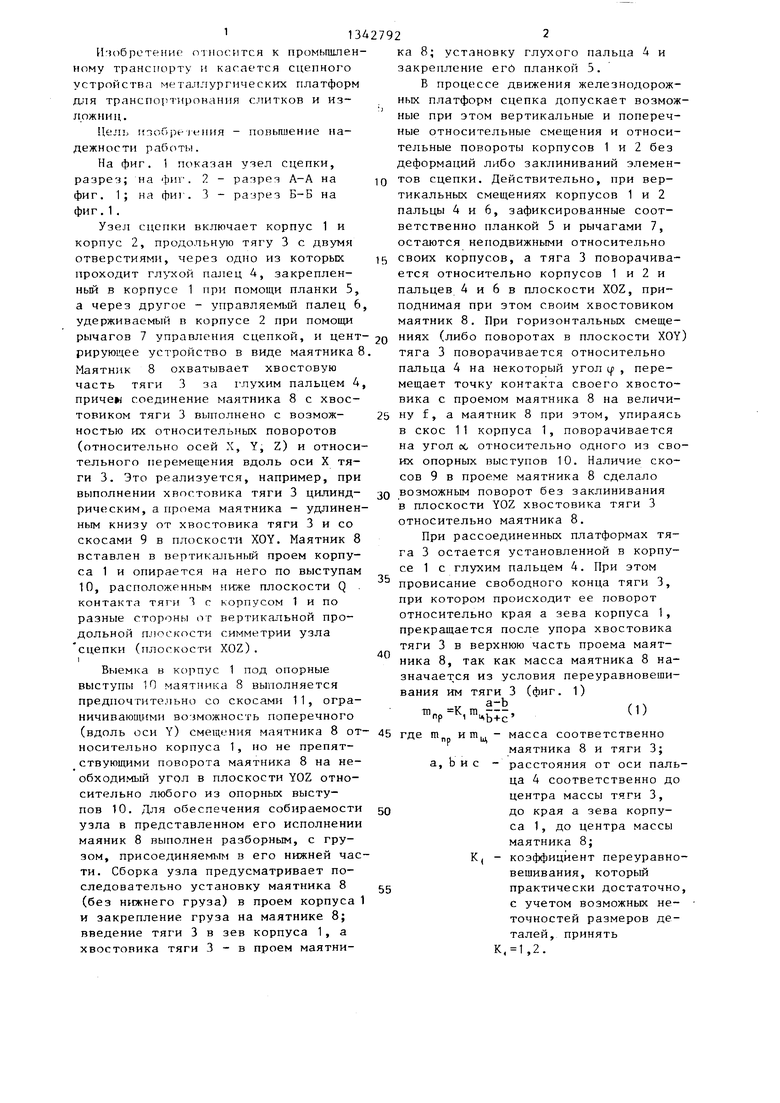
| название | год | авторы | номер документа |
|---|---|---|---|
| Сцепка железнодорожного транспортного средства | 1986 |
|
SU1316889A1 |
| Фрикционный узел | 1989 |
|
SU1705642A1 |
| Узел сцепки железнодорожной платформы промышленного транспорта | 1984 |
|
SU1286454A1 |
| Площадка для приема грузов в проемы зданий | 1986 |
|
SU1393891A1 |
| Устройство для соединения деталей с односторонним доступом | 1987 |
|
SU1550240A1 |
| Тягово-сцепное устройство | 1979 |
|
SU901082A1 |
| УСТРОЙСТВО ЦЕНТРИРОВАНИЯ И ЗАГРУЗКИ С УЗЛОМ ПРИЕМА И ПОДАЧИ ЧУРАКА В ЗОНУ ЦЕНТРОВКИ И МЕХАНИЗМОМ СИНХРОНИЗАЦИИ | 2008 |
|
RU2378107C1 |
| Запорное устройство для фиксации откидывающейся кабины на раме транспортного средства | 1984 |
|
SU1174315A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| СПОСОБ УЛУЧШЕНИЯ ВОДНО-ВОЗДУШНОГО РЕЖИМА ПОЧВЫ ПОД ПОСЕВАМИ МНОГОЛЕТНИХ КОРМОВЫХ КУЛЬТУР, УСТРОЙСТВО ДЛЯ НАРЕЗКИ ЩЕЛЕЙ-КРОТОВИН И УКЛАДКИ ДРЕНАЖНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ОСУШЕНИЯ И ПОДПОЧВЕННОГО УВЛАЖНЕНИЯ | 1997 |
|
RU2116723C1 |
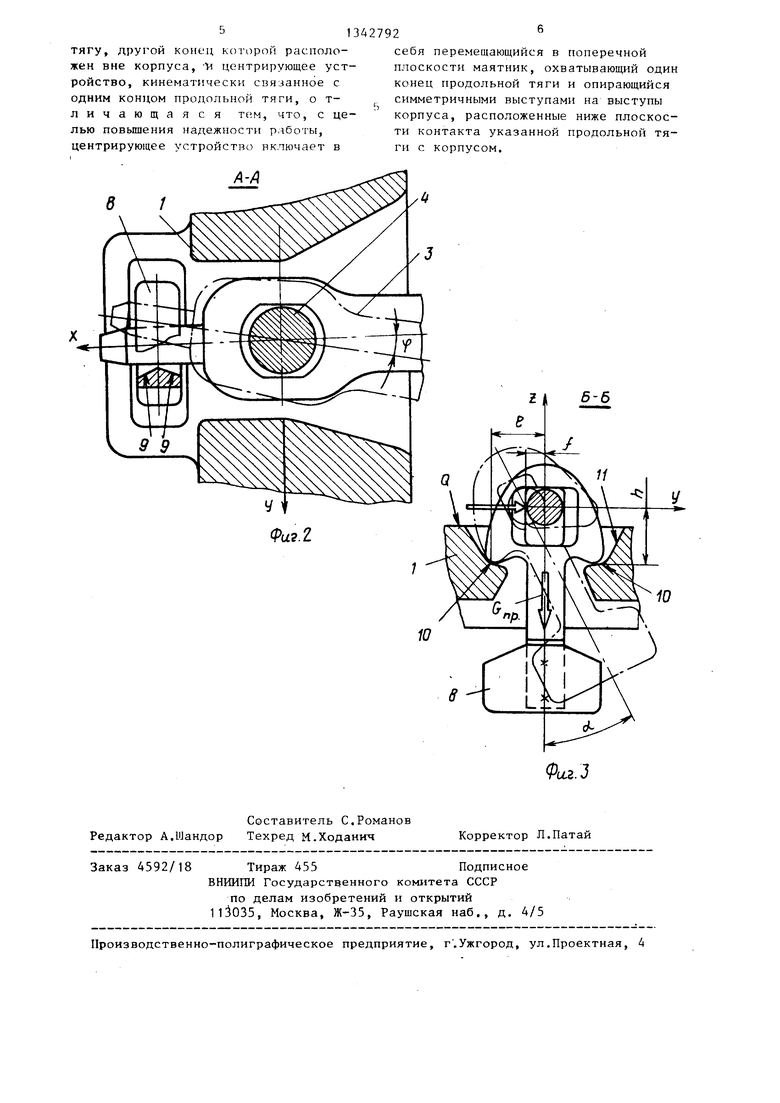
Изобретение относится к промышленному транспорту и касается сцепного устройства металлургических платформ. Цель изобретения - повьппение надежности работы. Устройство включает корпусы 1 и 2, продольную тягу 3 с двумя отверстиями, через одно из которых проходит глухой палец 4, закрепленный при помощи шпонки, а через другое- управляющий палец 6, удерживаемый рычагом 7, и центрирующее устройство в Риде маятника 8. При движении платформ возможны относительные смещения корпусов 1 и 2. При горизонтальных смещениях тяга 3 поворачивается относительно пальца 4 и перемещает маятник 8, который упирается своими выступами в корпус 1, в результате чего на тяге 3 возникает возвращающий тягу 3 в исходное положение крутящий момент силы. 3 ил. (Л 00 ю со 
| Сцепка железнодорожного транспортного средства | 1986 |
|
SU1316889A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
