113
Изобретение откосится к промысловой геофизике и может быть использовано в устройствах для измерения параметров траектории скважины.
Целью изобретения является повышение надежности работы устрор ства.
На чертеже приведено устрор1ство для ориентирования датчиков.
Устройство содержит заполненный жидкостью корпус 1, герметично установленный в нем электрический разъем 2. В корпусе 1 в опорах 3 установлена рамка 4 с эксцентричным грузом 5, датчиком 6 и упором 7, и переключаю- шш триггерный механизм 8, который содержит обмотки электромагнитов 9 и 10, жестко связанные с корпусом 1 сердечники электромагнитов 11 и 12, закрепленные в штоке 13 и фиксаторе 14 соответственно. На штоке 13 также установлена пр ткина 15 и арретируюши рычаг 16, который имеет шарнирное соединение со штоком 13 и шарнирное
соединение 17 с корпусом 1. На фикса- рычагом 16 и рпмка 4,освобождаясь от торе 14 установлена пружина 18 и упор фиксации под действием эксцентрично- 19, который заходит в зацепление с го груза 5, устанавливается в плос- арретирующим рычагом 16.кости искривления скважины.
Фиксатор 14 установлен с возможностью перемещения вдоль оси корпуса и кинемат1тчески связан в крайнем верхнем положении через упор 19 с арретирующим рычагом 16, а в крайнем нижнем положении - с упором 7 рамки.
30 Фор мул а изобретения
Устройство для ориентирования датчиков , содержащее заполненный жидкостью корпус с электрическим разъемом.
Датчик 6, представляющий собой индук- установленные внутри корпуса маломотивныи датчик, например, на основе феррозондов, электрически соединяется с разъемом 2 с 11омощ1зю маломомент- ного спирального токоотвода 20, а обмотки электромагнитов соединяются с разъемом 2 проводником 21.
Устройство работает следующим образом,
В процессе измерения упор 19 фиксатора 14 находится в зацеплении с арретируюп1им рычагом 16, обмотки электромагнитов 9 и 10 обесточены и рамка 4 под действием эксцентричного груза 5 устанавливается в плоскости искривления скважины, при этом точность ориентирования датчика 6 определяется только моментом трения опор 3, а влияние момента скручивания спирального токоотвода 20 мало, так как его максимальное скручивание не прементньп спиральный токоотвод и рамка с эксцентричным грузом, упором и датчиком, отличающееся тем, что, с целью повьш1ения надежности
4Q работы, оно снабжено переключающим триггерным механизмом, который имеет фиксатор с упором, шток с арретирующим рычагом, две пружины, установленные на фиксаторе и щтоке, два элек f тромагнита, сердечники которых закреплены в фиксаторе и щтоке, а обмотки жестко связаны с корпусом, при этом датчик связан с электрическим разъемом маломоментным спиральным
rQ токоотводом, арретирующий рычаг имеет шарнирное соединение с корпусом и штоком, а фиксатор установлен с возможностью перемешения вдоль оси- корпуса и кинематически связан с ар.- ретирующим рычагом и упором рамки. 55
ВНттИ Заказ 4612/29 Тираж 532
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
вьачает полуоборота (180) рамки вокруг корпуса.
По окончанию процесса измерения в обмотку электромаг нита 9 подается напряжение в виде импульса, под действием которого сердечник 11 втягивается в электромагнит, шток 13 движется поступательно, создавая поворот арретирующег О рычага 16 вокруг оси шарнира 17. Упор 19 выходит из зан,епления и фиксатор 14 под действием пружины 18 движется поступа- тельно, зажимает упор 7, фиксируя рамку 4. .В таком положении устройство транспортируется по скважине до следующего измерения и подъема на поверхность. Для приведения устройства Б состояние измерения на обмотку электромагнита 10 подается импульс напряжения - сердечник 12 втягивается в электромагнит, а упор 19 заходит в зацепление с арретирующим
30 Фор мул а изобретения
Устройство для ориентирования датчиков , содержащее заполненный жидкостью корпус с электрическим разъемом.
ментньп спиральный токоотвод и рамка с эксцентричным грузом, упором и датчиком, отличающееся тем, что, с целью повьш1ения надежности
работы, оно снабжено переключающим триггерным механизмом, который имеет фиксатор с упором, шток с арретирующим рычагом, две пружины, установленные на фиксаторе и щтоке, два электромагнита, сердечники которых закреплены в фиксаторе и щтоке, а обмотки жестко связаны с корпусом, при этом датчик связан с электрическим разъемом маломоментным спиральным
токоотводом, арретирующий рычаг имеет шарнирное соединение с корпусом и штоком, а фиксатор установлен с возможностью перемешения вдоль оси- корпуса и кинематически связан с арретирующим рычагом и упором рамки.
Подписное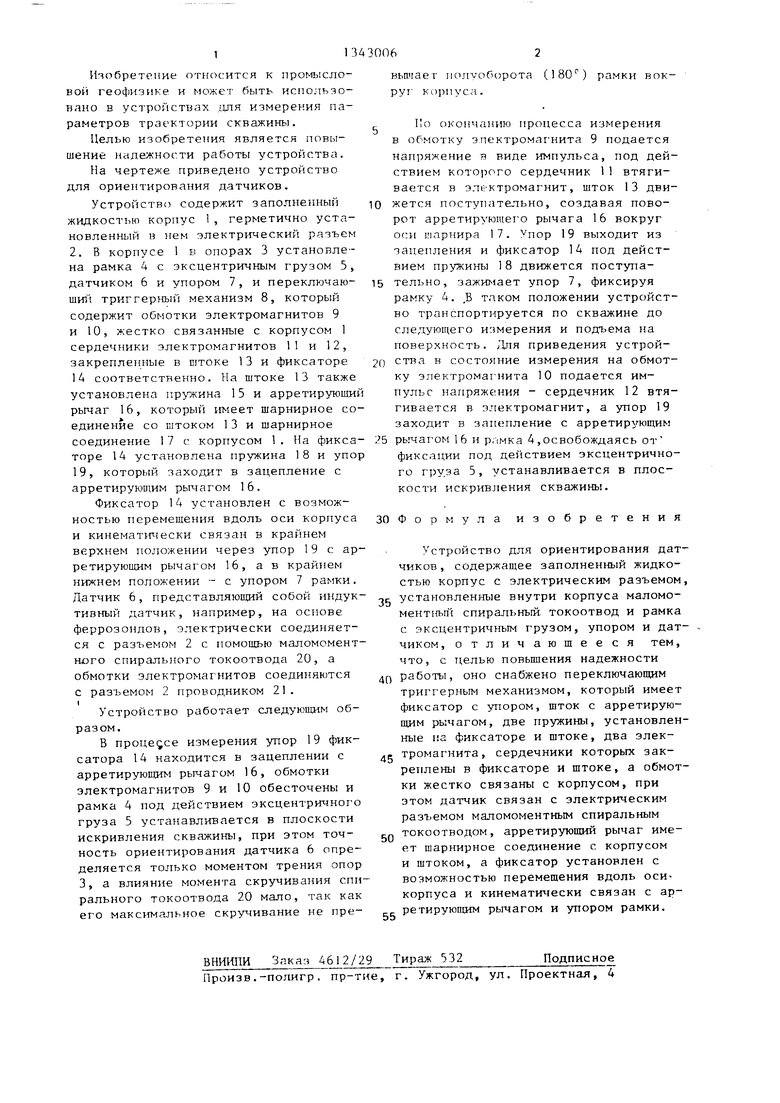
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ | 1969 |
|
SU234282A1 |
| Устройство для ориентирования датчиков магнитного поля | 1973 |
|
SU474605A1 |
| Устройство для ориентирования чувствитель-НыХ элЕМЕНТОВ | 1978 |
|
SU851306A2 |
| Инклинометр | 1974 |
|
SU682640A1 |
| Устройство для бесконтактной связи датчика на маятниковом блоке с каротажным кабелем | 1984 |
|
SU1182158A1 |
| Устройство для ориентирования датчиков магнитного поля | 1982 |
|
SU1089246A1 |
| ИНКЛИНОМЕТР ОДНОКРАТНОГО ДЕЙСТВИЯ | 1972 |
|
SU326356A1 |
Изобретение относится к промысловой геофизике и м.б. использовано для измерения параметров траектории скважины. Цель изобретения - повьшзе- ние надежности работы. Устр-во содержит заполненный жидкостью корпус (К) 1 с электрическим разъемом 2. Внутри К 1 установлены маломоментный спиральный токоотвод 20 и в опорах 3 рамка 4 с эксцентричным грузом 5, датчиком 6 и упором 7. Устр-во снабжено переключающим триггерным механизмом 8, который имеет фиксатор (Ф) 14 с упором 19, шток 13 с арретирую- щим рычагом 16, две пружины 15 и 18, установленные на Ф 14 и штоке 13, и два электромагнита. Сердечники 11 и 12 электромагнитов закреплены в Ф 14 и uiTOKe 13, а обмотки 9 и 10 жестко святашл г К I. Датчик 6 связан с pa3iiOM,M 2 токоотводом 20. Рычаг 16 имерл п:арпирное соединение с К 1 и штоком 13. Вдоль оси К 1 перемещается Ф 14, кинематически связанный с рычагом 16 и упором 19. На обмотку 10 подается импульс напряжения - сердечник 12 втягивается в электромагнит. Упор 19 заходит в зацепление с рычагом 16, и рамка 4, освобождаясь от фиксации, под действием груза 5 устанавливается в плоскости искривления скважины. 1 ил. 2 (Л 00 :о 05
| Датчик ориентации | 1983 |
|
SU1099060A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
