11
Изобретение относится к автоматике и вычислительной технике.
Целью изобретения является повышение производительности и точности позиционирования за счет оптимизации тормозного пути.
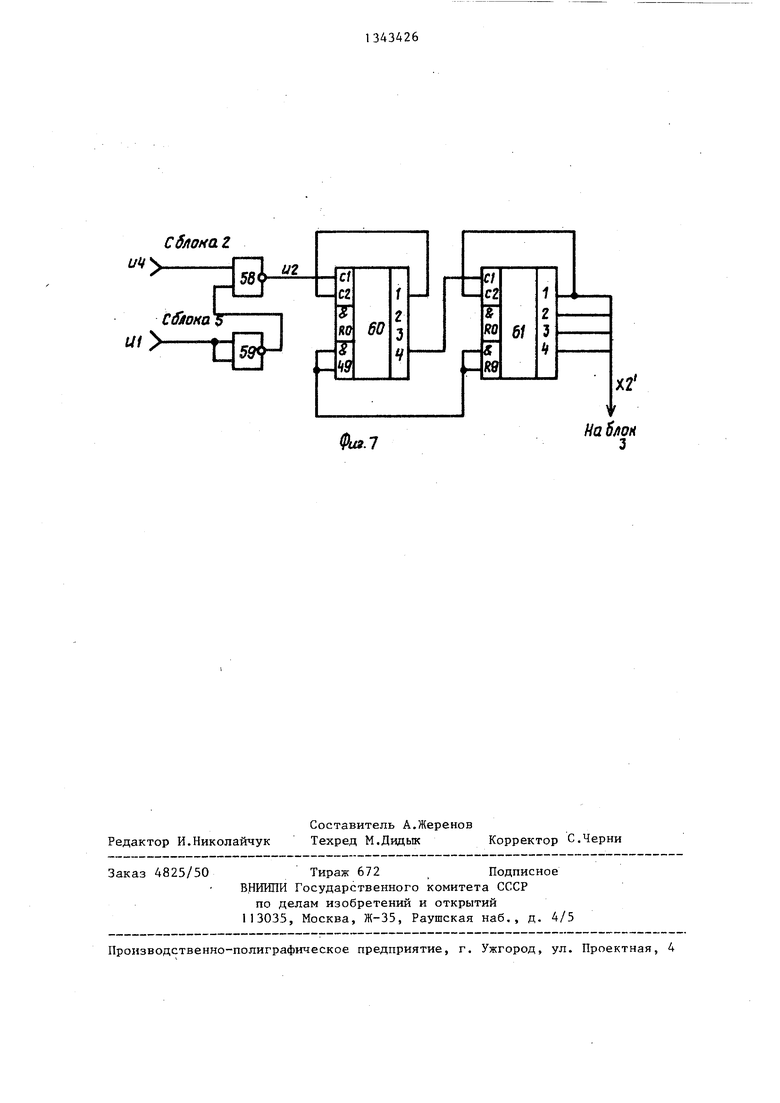
На фиг.I представлена схема устройства; на фиг,2 - схема блока срав нения; на фиг.З - схема блока включе ния привода; на фиг.4 - прием пост- .роения блока задания адреса; на фиг.З временная диаграмма работы устройства; на фиг.6 - схема реверсивного счетчика; на фиг, 7 - схема счетчика..
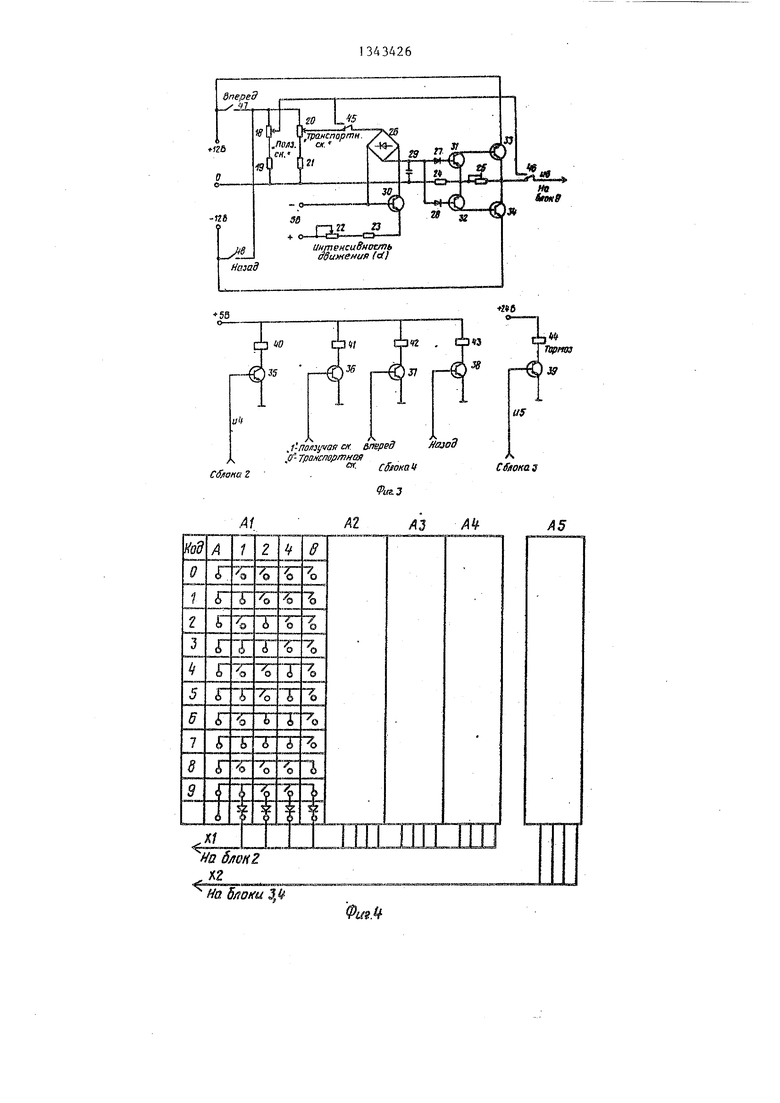
Устройство содержит блок 1 задания адреса, блоки 2 и 3 сравнения, блок 4 переключения скорости, блок 5 датчиков положения, реверсивный счетчик 6, счетчик 7, блок 8 включения привода, привод 9, схемы 10-13 сравнения, элементы И-НЕ 14-16, резистор 17, резисторы 18-25, вьтрями- тель 26, диоды 27 и 28, конденсатор 29, транзисторы 30-39, элементы 40- 44 коммутации, переключатели 45-48, резисторы 49 и 50, элементы И-НЕ 51- 53, счетные узлы 54-57, элементы И- НЕ 58 и 59 и счетные узлы 60 и 61.
Устройство работает следующим об- разоМо
С блока 1 на блоки 2-4 подается заданная программная информация - за данный адрес останова привода X, который представляет собой сумму адреса начала торможения XI и длины тормозного пути X2, Заданный адрес нача ла торможения XI подается на блок 2, длина тормозного пути Х2 - на блоки 3 и 4,
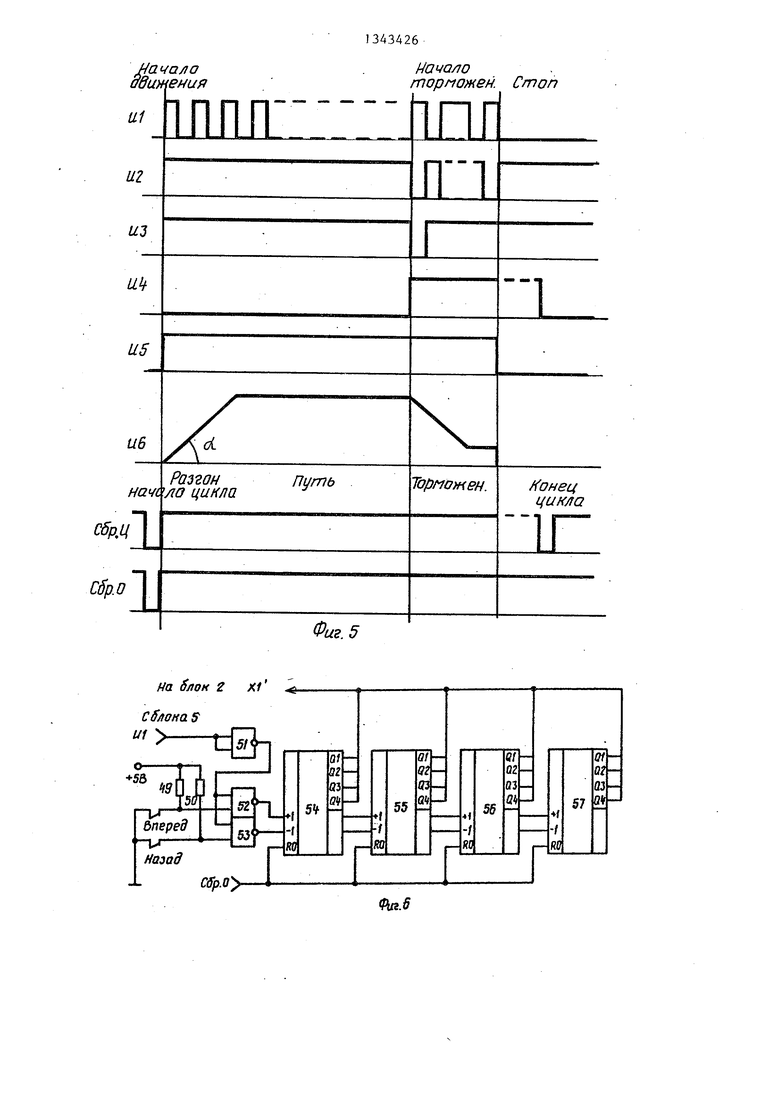
Если величина Х2 отлична от нуля, ,блок 4 вьщает на блок 8 команду разрешения на разгон привода. В блоке 2 происходит сравнение цифрового значения заданного адреса XI и цифрового значения текущего адреса XI , считанного датчиком блока 5 и счетчиком 6. Блок 2 передает управляющий сигнал на блок 8, который вьщает на привод 9 сигнал разрешения начала движения. Разгон привода до максимальной скорости происходит автоматически. При движении механизма к заданному адресу сигнал на выходе блока 2 появляется при равенстве значений XI и ХГ ,
т.е. при нахождении блока 5 датчиков положения на позиции XI, и на выходе блока 2 появляется разрешающий сигнал на включение счетчика 7 и на пе
10
15
20
434262
реключение привода 9 в режим торможения . Скорость движения транспортного механизма плавно уменьшается и через определенное время привод переключается на ползучую скорость. В блоке 3 происходит сравнение цифрового значения заданного тормозного пути Х2 и цифрового значения текущего адреса Х2 , считанного датчиком блока 5 и счетчиком 7. Транспортный механизм двигается на ползучей скорости до тех пор, пока не произойдет совпадения информации Х2 и Х2 . Блок 3 вьщает сигнал равенства в блок 8, в результате чего происходит останов привода 9 на заданной позиции.
Устройство-работает аналогично при необходимости перемещения трайс- портного механизма назад.
Если необходимо переместить транспортный- механизм на небольшое расстояние, т.е. когда не рекомендуется разгон привода, устройство работает
25 следующим образом. В этот случае в заданной программной информации отсутствует заданная длина тормозного пути Х2, и на блок 2 с блока 1 подается заданный адрес начала торможения XI, который является заданным адресом останова привода X. Поскольку величина Х2 имеет нулевое значение, блок 4 вьщает на блок 8 команду запрещения на разгон привода, В бло„р. ке 2 происходит сравнение цифрового значения заданного адреса останова привода X и цифрового значения текущего адреса X , считанного датчиком блока 5 и счетчиком 6. Блок 2 пере4Q дает Управляющий сигнал на блок 8, который вьщает на привод 9 сигнал разрешения начала движения на ползучей скорости. Транспортный механизм двигается до тех пор, пока не
,jg произойдет совпадения информации X и X . Блок 2 вьщает сигнал равенства в блок 8, в результате чего происходит останов привода 9.
30
50
Формула изобретения
Устройство для управления транс- портньм механизмом, содержащее блок задания адреса, выход адреса начала
торможения которого соединен с пер-
вым информационным входом первого
блока сравнения, второй информационный вход которого соединен с выходом реверсивного счетчика, счетный вход
313
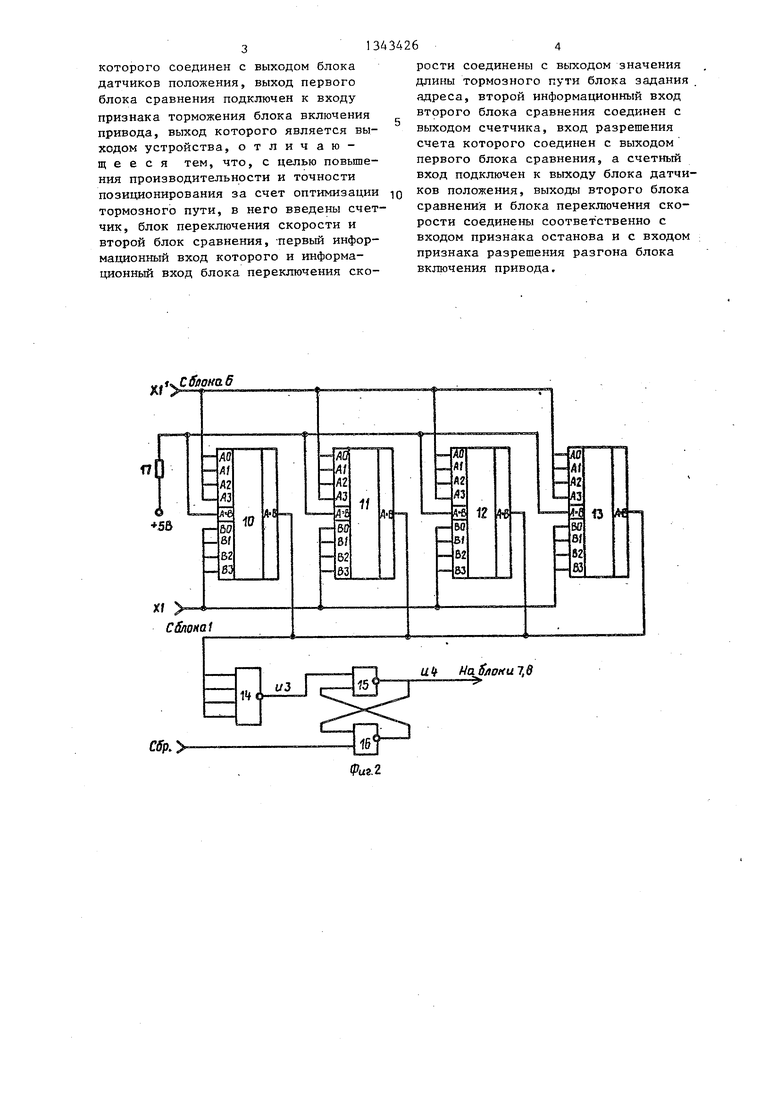
которого соединен с выходом блока датчиков положения, выход первого блока сравнения подключен к входу признака торможения блока включения привода, выход которого является выходом устройства, отличающееся тем, что, с целью повышения производительности и точности позиционирования за счет оптимизации тормозного пути, в него введены счетчик, блок переключения скорости и второй блок сравнения, -первый информационный вход которого и информационный вход блока переключения ско,1 Сбаон13.6
Лг i
10
л-а-п
АО All Д2 A3 ВО 8/ 62
вз
с блокад
рости соединены с выходом значения длины тормозного пути блока задания адреса, второй информационный вход второго блока сравнения соединен с выходом счетчика, вход разрешения счета которого соединен с выходом первого блока сравнения, а счетный вход подключен к выходу блока датчиков положения, выходы второго блока сравнения и блока переключения скорости соединены соответственно с входом признака останова и с входом признака разрешения разгона блока включения привода.
12
f№
АО
дг
А2
дз
&i
во
Sf
Чвг
13
1-126
-ЙЙ
58 о-
и /
,1-Пощ акм впередfieaad
о - Транспортная
ОТ- С5fоко 14
Фиг.3
С блока 3
Ai
Аг
fe 5/foifu 3,if
Фи9.Ч
AilА5
Фиг. 5
На блок г X/
L
j|
5 Cffp.O
tf /
ДО
55
С±Г
56
Риг.5
ФигЛ
Составитель А.Жеренов Редактор И.Николайчук Техред М.Дидык Корректор С.Черни
Заказ 4825/50
Тираж 672Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
На 6/iOH 3
Изобретение относится к автоматике и вычислительной технике. Целью изобретения является повьшение производительности и точности позиционирования за счет оптимизации тормозного пути. Устройство содержит блок 1 задания адреса, блоки 2 и 3 сравнения, блок 4 переключения скорости, блок 5 датчиков положения, реверсивный счетчик 6, счетчик 7, блок 8 включения привода, привод 9. Поставленная цель достигается за счет введения счетчика, блока переключения скорости, второго блока сравнения и соответствующих функциональных связей между блоками устройства. 7 ил. со 4 СО 4 tC О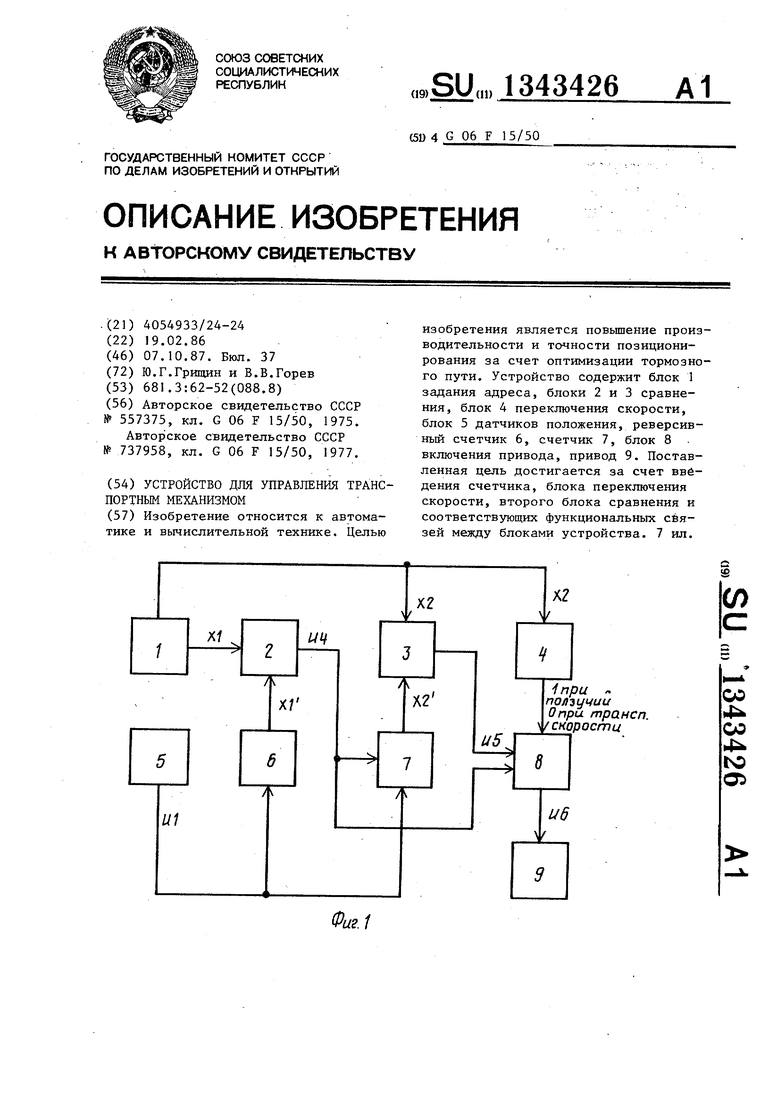
| Устройство для автоматического управления штабелером | 1975 |
|
SU557375A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для цифрового управления транспортным механизмом | 1977 |
|
SU737958A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
