M,-.(jc;|Hj-enHi, (i-ii 10 к промыт.leHiioix rpjiSii-nopry, n :;;:ти(чти л,;;я авт(1мати-MiiiMii yiipaii.ionii i ;-,:ч;л-1ьк) кранои-пггабо, iopoii, i ()KC; nb;i:) aciio.ibaoiiano д/Я авг(1матп.1апии iiui ()-p;iai рхзочных тран.||() 1 сь:.1а.чск11х работ па прс.шрияTi i. .ibiiu.;ieinK)cTii и сельского хозяйства д.чи 1е|)еработки и складирОЕ5а1П1я сс.пьхозпродуктов.
Известно устройство для управления транспортным механизмом, содержание программный блок, подключепный к нер вому входу сумматора, второй вход которого подключен к выходу блока опреде-тения текущего адреса, а выход - к входу блока выбора направления движения, соединенного выходом с входом блока разрешстя исполнения программы, выход которого подключен к одному входу исполнительного блока, к входу программного блока и к информационному входу блока команд переключения скорости и к входу блока останова и точного нозиционирования, выходы двух последних из которых подключены соответственно к второму и третьему входам исполнительного блока Г.
Недостатками известного устройства являются недостаточно высокая точность управления, так как отсутствует оптимизация скорости движения транспортного механизма, а также исключение движения транспортного механизма но запретным программам.
Цель изобретения - повышение точности управления движением транспортного механизма.
Цель достигается тем, что устройство автоматического управления скоростью транспортного средетва, содержащее программный блок, подключенный к первому входу сумматора, второй вход которого подключен к выходу блока определения TCKyiJiero адреса, а выход - к входу блока выбора направления движения, соединенного выходом с входом блока разрен1ення иснолнепия программы, выход которого подключен к одному входу исполнительного блока, к входу нрограм.много блока, к информацио ному входу блока команд переключения скорости и к входу блока останова и точного позицирования, выходы двух последних из которых подключены соответственно к второму и третьему входам исполнительного блока, снабжено блоком определения мо.мента переключения скорости, блоком запретных программ и блоком определения фактической скорости, вход которого подключен к выходу сумматора, а выход -к четвертому входу исполнительного блока и к первому входу блока определения моMeiiia переключения скорости, второй вход KOTopoio подключен к выходу сумматора, тре1ий к выходу блока разрещения испо;1иепия программы, а выход - к разреп1аклцему входу блока команд переключения, скорости, при этом вход блока запретных программ подк.1ючеп к выходу программного блока, а выход к пятому входу ис11олните.1ьпого блока.
При этом блок определения момента переключения скорости содержит регистр памяти с де.:1еп1;ем па два, сумматор, первый и второй элементы ИЛИ НЕ. причем первый и второй входы первого э.темента И„ПИ--.1-Ил являются соответственно вторы.м н третьим входами блока определения момента переключения скорости, а его выход соединен с входом регистра памяти с делением на два, вы.ход которого подключен к перво.му входу сумматора, второй вход которогч) подключен к выходу сумматора устройства, а выход - к первому входу второго элемента И.1И НЕ, второй вход которого является первым входом блока определения момента переключения скорости, выходом которого является выход второго эле.мента ИЛИ- - НЕ.
Причем блок запретных программ содержит формирователь сигнала запрета, выход которого является выходо.м блока, задатчик запретных npoi-рамм и сумматор, подключепный первым входом к его выходу, а вььходом - к входу формирователя сигнала запрета, при этом входом блока является второй вход сумматора.
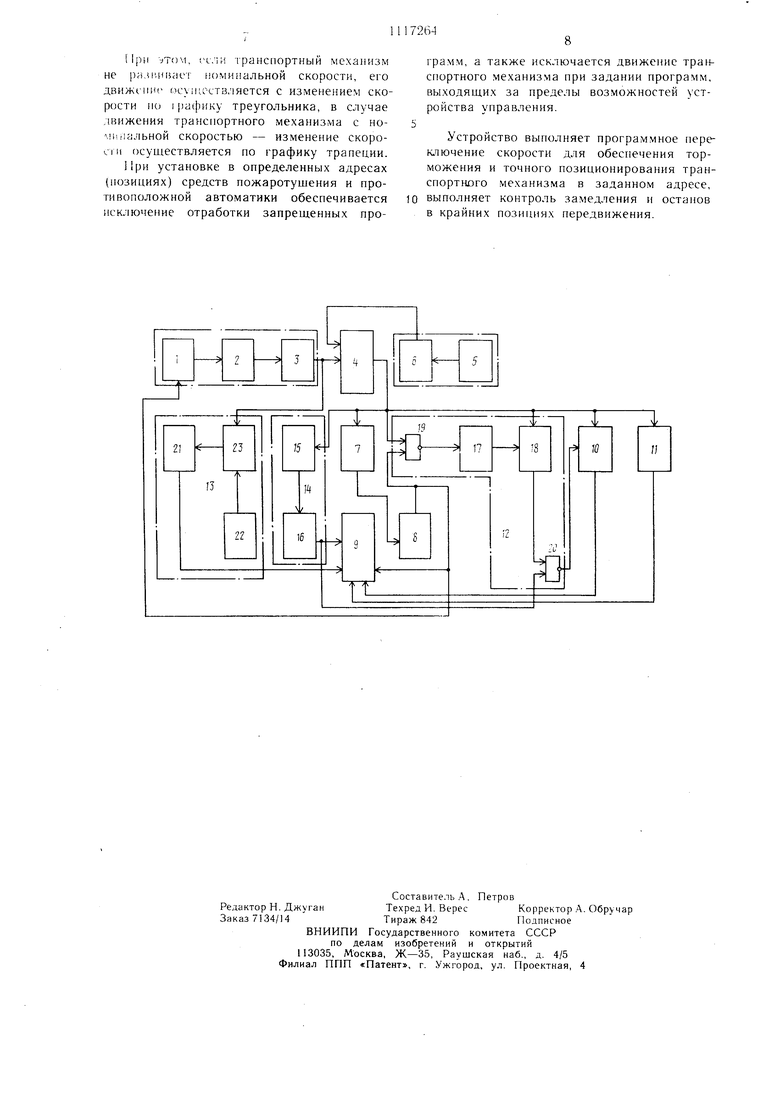
На чертеже приведена блок-схема устройства автоматичеекого управления скоростного транспортного средетва.
Устройство содержит программный блок, состоящий из последовательно соединенных блока 1 ввода программы, блока 2 памяти программы, блока 3 преобразователя в двоичный код, выход которого подк„тючен к первому входу сумматора 4, второй вход которого подключен к Е ыходу блока определения текущего адреса, состоящего из последовательно соединенных блока 5 хода текущего адреса и блока 6 считывания адреса, а выход - к входу блока 7 выбора направления движения, соединенного выходо.м с входо.м блока 8 разрешения исполнения программы, выход которого подключен к одному входу исполнительного блока 9, к входу програ.ммного блока, к информационному входу блока 10 команд переключения скорости и к входу блока 11 останова и точного позицирования, выходы двух последних из которых подключены соответственно к второму и третьему входам исполнительного блока 9. Устройство также содержит блок 12 определения момента нереключения скорости, блок 13 запретных программ и блок 14 определения фактической скорости, состоящий из последовательно соединенных нифроаналогового преобразователя 15 и датчика 16скорости, вход которого подключен к выходу сумматора 4, а выход - к четвертому входу исполнительного блока и к первому входу блока 12 определения момента переключения скорости, второй вход которого подключен к выходу сумматора 4, третий - к выходу блока 8 разрешения исполнения программ, а выход - к paapeinaioщему входу блока 10 команд переключсмия скорости, при этом вход блока 13 зац-регных программ подключен к выходу np()rp;i iмного блока, а выход - к пятому входу не полнительного блока. При этом блок 12 определения момента переключения скорости содержит регистр 17памяти с делением на два, сумматор 18, первый 19 и второй 20 элементы ИЛИ- НЕ, причем первый и второй входы первого 19 элемента ИЛИ-НЕ являются соответственно вторым и третьим входами блока 12 определения момента переключения скорости, а его выход соединен с входом регистра 17 памяти с де.1ением на два, выход которого подключен к первому входу сумматора 18, второй вход которого подключен к выходу сумматора 4 устройства, а выход - к первому входу второго 20 элемента И ЛИНЕ, второй вход которого является первым входом блока 12 определения момента переключения скорости, выходом которого ЯВляется выход второго 20 элемента ИЛИ-НЕ Блок 13 запретных программ содержит формирователь 21 сигнала запрета, выход которого является выходом блока, задатчик 22 запретных программ и сумматор 23, подключенный первым входом к его выходу, а выходом - к входу формирователя 21 сигнала запрета, при этом входом блока является второй вход сумматора 23. Устройство работает следуюгцим образом. Программа по адресованию транспортного средства вводится в десятичном исчислении через блок 1 ввода программы, запоминается в блоке 2 памяти программы и преобразоватенная в блоке 3 преобразователя в двоичный код поступает на первые входы сумматора 4. На вторые входы сумматора 4 информация о текущем положении транспортного механизма в двоичном коде снимается блоком 6 считывания адреса с носителей информации блока 5 кода текущего адреса. По результатам сложения кодов заданного и текущего адресов в сумматоре 4 блок ( Г5ыбора .1ения движения формирует команду направления движения транспортного механизма, которая поступает на ис юлнительный блок 9 после формирования команды разрешения отработки заданной программы блоком 8. Блок 8 разрешения исполнения программы реализует сигналы о выполнении предшествующей программы и сигналы всех блокировок в команду разрешения исполнения вновь введенной программы. Во время отработки программы блок 8 блокирует ввод новой программы в программный блок. (Хчновременпо с второго выхода суммашоа 4 информация поступает на блок 12 определения момента переключения скорости, блок 14 определения фактической скорости, блок 10 команд переключения скорости и блок 11 останова и точного позиционирования. В блоке 14 информация с выхода сумматора 4 преобразуется цифроаналоговым преобразователем 15 в аналоговый сигнал напряжения, который ноступает на вход датчика 16 скорости, выполненного в виде операционного уси тителя, где этот сигнал сравнивается с опорными напряжениями. С выхода датчика 16 сигнал поступает на вход исполнительного блока 9, где пропорционально ему отрабатывается оптимальная скорость передвижения транспортного механизма. Исполнительный блок 9 реализует все команды устройства управления и выполняет включение исполнительного двигателя, переключение скорости, останов и точное позипионирование но заданной программе. Он включает в себя реверсивное тиристорное устройство унравления и исполнительный двигатель. Все команды от других блоков поступают на тиристорное устройство управления. В блоке 12 ифнормания с выхода сумматора 4 преобразуется в команду начала не)ок.1ючения скорости на замсл.1ение при л.нижоиип TpancnopTHOit) механизма, со скоростью. Mcnbuieii noMiii.a.ibHoii. т. с. измсneinic скорости происходит но 1раф11ку треугольника. На в.ходы регистра 17 памяти с ;кменисм на два информация с вы.чода схмматора 4 поступает через э.чсменты НЛП Ш19 и запоминается. Запоминается код. коTopbni поступает с выхода сумматора 4 до начала движения транспортного механизма. После поступления из блока 8 разрешения исполнения программы сигнала на вторые входы элементов 19 входы регистра 17 памяти закрываются и в регистре на все время выполнения программы транспортным механизмом сохраняется записанное число, которое стирается после отработки заданной программы или при записи повой. Таким образом, на первые входы сумматора 18 из регистра 17 памяти с делением на два поступает код постоянного числа, в два раза .мепыпего записанного в регистр памяти. Деление кода записанного числа на два может осуществляться за счет сдвига выходов разрядов регистра 17 памяти со входами сумматора 18 на один в сторону старших разрядов, т. е. выход второго разряда регистра 17 памяти соединяется с первым входом сумматора 18, третий - со вторым и т. д. На вторые входы сумматора 18 с выхода сумматора 4 поступает изменяюпдаяся информация о движении транспортного механизма. При совпадении кодов по двум входам, что произойдет, когда транспортный механизм пройдет,половину запрогра.ммированного пути, на выходе сумматора 18 формируется сигнал, который через элемент ИЛИ-НЕ 20 поступает на разрешающий вход блока 10 команд переключения скорости, с выхода которого команда переключения скорости поступает в исполнительный блок 9. С выхода блока 12 определения момента переключения скорости сигнал в блок 10 команд переключения скорости постунит при условии, если транспортный механизм не будет развивать номинальной скорости (согласно ГОСТу 16553-82 номинальная скорость продвижения- ограничена величиной 2,5 м/с). При этом изменение скорости происходит по графику слегка усеченного треугольника, т. е. короткое время транспортный механизм движется на установившейся скорости. Это необходимо, чтобы исключить удары в кинематических цепях привода при резком изменении режима разгона в тормозной режим. Такое изменение графика скоростей достигается за счет того, что сигнал с датчика 16 скорости блока 14 формируется раньше, чем сигнал, выдаваемый блоком 12 определения момента переключения скорости. При движении транспортного механизма с номинальной скоростью датчик 16 скорости выдает сигнал на второй вход элемента ИЛИ-НЕ 20, который закрывает выход блока 12 определения момента переключения скорости. При движении транспортного механизма со скоростью, меньшей номинальной, сигнал на переключение скорости и замедление формируется в блоке 10 команд переключения скорости. В это.. случае действует условие начала замедления транспортного .механиз.ма на строго онреде;1енном расстоянии до запрограммируемой позипии. Код, соответствуюш.ий пути замедления, вырабатывается блоком 10 команд переключения скорости. При совпадении этого кода с кодом, поступившим с выхода сумматора 4, блок 10 команд переключения скорости формирует сигнал об изменении скорости, который поступает в исполнительный блок 9. После замедления транспортный механизм небольшой отрезок пути движется на ползучей скорости до поступления ко.манды из блока 11 останова н точного позинионирования. Команда на останов формируется блоком 11. Блок 6 считывания адреса имеет датчики, которые считывают информацию с адресоносителей блока 5 кода текушего адреса, и память считываемого кода, причем перед считыванием новой информации ранее записанный код стирается. Аналогично устройство работает при задании программы из любого положения транспортного механизма вдоль пути движения вперед или назад. Для повышения точности управления транспортным механизмом в результате исключения движения по адресам, в которых размешаются устройства пожаротушения, а также в случае ошибочного зада Н1я программ, превы иающих емкость адресного устройства, применен блок 13 запретных программ, который работает следуюшим образом. В задатчике 22 запретных программ набираются коды позиций, в которых установлены средства пожаротушения, и коды, соответствуюшие ошибочному заданию программы. Информация об этих кодах с выхода задатчика 22 запретных програм.м поступает на первый вход третьего сумматора 23, на второй вход которого поступает информация с выхода программного блока о заданной программе. Если код заданной программы совпадает с одним из кодов, заложенных в задатчике 22 запретных программ, то с выхода формирователя 21 сигнала запрета на вход блока 9 поступает сигнал, запрешаюнхий исполнение заданной программы, а на мнемосхеме загорится сигнал о задании ошибочной програм.м ы. Изобретение обеспечивает движение транспортного механизма по заданной программе с обеспечением выбора оптимальной скорости в зависимости от длины пути пеоемешения.
При VTOV1, 1Ч.1И гранспортный механизм не р;ки,ив;)ст номинальной скорости, его движ(.ч1И(- ()с 11:,еетв,чяется с изменением скорости но I |)а(|)ику треугольника, в случае лвижения транснортного механизма с но,1,1альной скоростью - изменение скоросги осуществляется по графику трапеции.
установке в определенных адресах (позициях) средств пожаротушения и противоположной автоматики обеспечивается исключение отработки запрещенных программ, а также исключается движение транспортного механизма при задании программ, выходящих за пределы возможностей устройства управления.
5
Устройство выполняет программное переключение скорости для обеспечения торможения и точного позиционирования транспортного .механизма в заданном адресе, выполняет контроль замедления и останов в крайних позициях передвижения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортным механизмом | 1981 |
|
SU1079562A2 |
| Устройство для управления транспортным механизмом | 1977 |
|
SU698865A1 |
| Устройство для программного управления подъемно-транспортным механизмом | 1982 |
|
SU1048456A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| ЦЕНТРАЛЬНЫЙ ПРОЦЕССОР МУЛЬТИПРОГРАММНОЙ МУЛЬТИПРОЦЕССОРНОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ | 1971 |
|
SU309363A1 |
| СИСТЕМА УПРАВЛЕНИЯ ШАГАЮЩИМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU1739607C |
| Центральный процессор | 1991 |
|
SU1804645A3 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
| Управляющая векторная вычислительная система | 1982 |
|
SU1120340A1 |
1. УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА, содержащее программный блок, подключенный к первому входу сумматора, второй вход которого подключен к выходу блока определения текущего адреса, а выход - к входу блока выбора направления движения соединенного своим выходом с входом блока разрешения исполнения программы, выход которого подключен к одному входу исполнительного блока, к входу программного блока, к информационному входу блока команд переключения скорости и к входу бло ка останова и точно1-о позиционирования, выходы двух последних из которых подключены соответственно к второму и третьему входам исполнительного блока, отличающееся тем, что, с целью повышения точности управления, оно снабжено блоком определения момента переключения скорости, блоком запретных программ и блоко.м определения фактической скорости, вход которого подключен к выходу сумматора,, а выход - к четвертому входу исполнитель ного блока и к первому входу блока определения момента переключения скорости, второй вход которого подключен к выходу сумматора, третий - к выходу блока разрешения исполнения программы, а выход - к разрешающему входу блока команд переключения скорости, при этом вход блока запретных программ подключен к выходу программного блока, а рыод - к пятому входу исполнительного блока. 2.Устройство по п. 1, отличающееся тем, что блок определения момента переключения скорости содержит регистр памяти с делением на два, сумматор, первый и рой элементы ИЛИ-НЕ, причем первый и второй входы первого элемента ИЛИ-НЕ являются соответственно вторым и третьим входами блока определения момента переключения скорости, а его выход соединен с входом регистра памяти с делением на два, выход которого подключен к первому входу сумматора, второй вход которого подключен к выходу сумматора устройства, а выход - к первому входу вто to рого элемента ИЛИ-НЕ, второй вход которого является первым входом блока опреО5 деления момента переключения скорости, выходом которого является выход второго элемента ИЛИ-НЕ. 3.Устройство-по п. 1, отличающееся тем, что блок запретных программ содержит формирователь сигнала запрета, выход которого является выходом блока, задатчик запретных программ и сумматор, подключенный первым входом к его выходу, а выходом к входу формирователя сигнала запрета, при этом входом блока является второй вход сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления транспортным механизмом | 1977 |
|
SU698865A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
