(54) УСТГОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ШТАБЕЛЕРОМ
целое число мест по задаштю. Механизм затормаживается, скорость падает до минимальной, при которой можно осуществить точный останов, и на этой скорости он движется до индикации требуемого местойоложення.
Наиболее б1 изким по технической сущности к изобретению является устройство 3, содержащее блок управления скоростью движения, последовательно соединенные блок задания адреса и схему; сравнения, одшг из входов которой соедияен с первым вьгходом блока определения текущего адреса, последовательно соединенные блок формирования сигналов положения механизмов щтабелера и блок программного задания адресов ячеек и погрузочно-разгрузочных операций, входы которого соединены соответственно с выходами блока задания адреса, схемы сравнения и вторым выходом блока определения текущего адреса, а управляющие выходы соед№шны срответсгвешга с управляю щими входами схемы сравнения и блоков задания приводдми.
В блоках устройства применены датчики - горизонтальной и вертикальной координаты адреса, положения точной остансрвкн; положения механизмов штабеллера, счетчики горизонтального и вертикального адресов соответственно, схемы импульсной доводки щтабелёра, схемы формирования команд на управление механизмами щтабеллера, схемы ввода адресной информации и счетчики адреса, схемы принудительной установки триггеров счетчика адреса в нулевое положение.
Схема импульсной доводки содержит дешифратор, вход которого подключен к выходу счетчика горизонтального адреса, элемент И, один вход которого подключен к выходу дешифратора а второй - к выходу датчика положения точной остановки, и формирователь с регулируемой (жважностью, которьш соединен со входом схемы, регулир)тощей момент включения привода горизонтального перемещения штабелЬ°ра. i.
Для сокращения времени пробега на малой скорости применены датчики положения точной остановки, что усложняет процесс настршки устройства. Причем датчик положения точной останот;kH настраивается по макжмально загру сенному ;щтабелёру. , Если учесть, что тормозной путь разгрузкенного щтабеллера меньпв, то можно сократить время поиска, а значит улучщить техникозкономические показатели устройства.
В известном устройстве, не учитьшается разнипд в инерционности загруженного и разгруженного щтабеллера.
Недостатком указанного устройства является наличие дополнительного датчика положения точной остановки, функции которого может вьтолнятъ датчик счета адреса. В рассматриваемом устройстве не учитьтается ррница в инерционности загруженного и разгруженного щтабел1 ра а это увеличивает время поиска, так как датчик положения точной остановки настраивается с учетом выбе
га максимально загруженного штабелёра. Однако холостые пробеги штабелёра: (когда он не загружен) составляют около 50 % времени работы склада. Если учесть, что тормозной путь разгруженного 5 щтабелера а,-- шейовательнв звем торможения меньше, можно снизить процент непроизводительных затрат времени.
Целью изобретения является повыщение быстродействия устройства, упрощение и снижение труQ доемкости процесса настройки и регулировки.
г -Поставленная ;цель достигается тем, что в предложенном устройстве блок управления скоростью
-: движения содержит злементы И,ИЛИ, памяти и задержки. Первые входы двух злементов И соединены
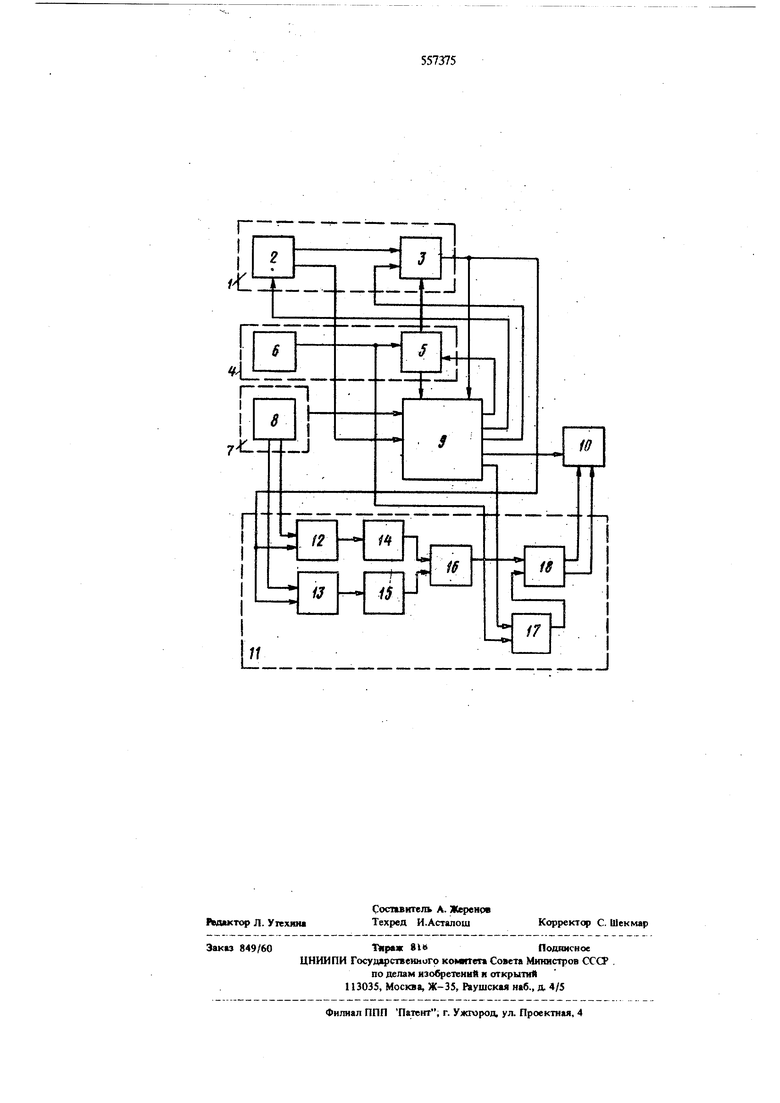
8 с соответствующими выходанет блока формиррва, ния. сигнале положешш механизмов . щтабеяёра, вторйе входы - С1ВЫХОДОМ-схемы сравнении, а выходы - через соответствующие элементы задержки соед11нены со входами элемента, выход которого соединен с первым входом элемента, памяти, второй вход которого соединен с выходом третьего элемента И Входы третьего элемента И подключены к соответствующему выходу блока программного задания адресов ячеек и погруэГочно-разгру5 зочных операций и к третьему выходу блока определения тек)вдего ащ)еса. Выходы элемента памяти соеданены с входами блока управления приводами. Схема устройства представлена на чертеже. Устройство содерншт блок 1 задания ащ)еса с
0 регистррм 2 задаятло адреса, схемуЗ сравнения
для сравнения заданного и текущего адреса, блок
определения текущего адреса 4, (юстоящих из ре-гистра 5 текущего адреса и датчика 6 счета адреса по
. горизонтали и вертикали, блок 7 форл рования
5 сигналов положения механизмов щтабелёра с дат чиком 8 определения загрузки-разгрузки, блок 9 программного задания адресов ячеек и погрузоразгрузочных операций, блок 10 управления приводами и блок 11 управления скоростью движения.
0 Последний содержит включаюш ие элементы И 12 и 13, злементы 14 и 15 задержки, элемент ИЛИ 16, элемент И 17 и элемент 18 памяти.
Устрмство работает следуюцдам образом.
В блок 1 задания адреса заносится адрес ячейки
5 в двоично-десятичном коде. Занесение может осуществляться как автоматически от какого-либо
/ внепшего устройства, так и автономно с пульта оператора, где набирается требуемое значение и индацируется в десятичном коде. После запуска
0 устройства адрес разлагается на вертикальную и горизонтальную координаты ячейки и запоминается в регистре 2 в двоичном коде. Схема 3 фавнения опращивается, и определяется : равенство : или неравенство i занесенного агфеса с адресом ячейки, у
5 которш находится щтабелёр,. и записаши п« в регистре5. Если имеется неравенство; то в. регистр 5 заносится дополнительная единица (или другое число, в зависимости от того, каков выбег щтабелёра при торможении, т.е. за сколько ячеек
0 1до заданной необходимо начинать торможение) из
блока 9. Штабелёр движется с большой скоростью, и с помощью датчика 6 определяется текущая координата положения штабелера. За один адрес до нужного схема 3 сравнения выдает импульс равенства, который поступает в блок 9 задания и в блок 11 управления скоростью движения на входы элементов 12 и 13, Сигнал проходит через тот элемент, на втором входе которого находатся разрешаюицш потенциал от датчика 8 определения загруэки-разгрузки и через соответствующий элемент 14 и 15 задержки и элемент ИЛИ 16 на первьш вход элемента 18 памяти. Импульс запоминается, и на выходе элемента 18 памяти появляется сигнал перехода на медленную скорость, который поступает в блок 10 управле1шя приводами.
Сигнал перехода на медленную скорость по времени появлешм позже, чем импульс равенства кодов. Причем в зависимости от того, через какой злемент задержки .проходит импульс равенства кодов, датчик 8 загрузки-разгрузки выбирает элемент задержки.
Инерционность загружаемого штабелера больше и торможение должно, быть начато раньше, инерционность разгруженного штабелера меньше и торможение может быть начато позже.
Штабелёр затормаживается и на некоторой минимальной скорости (при которой возможен точный останок) наезжает на счетный индикатор заданного адреса.
Сигнал с датчика 6 поступает на первый вход элемента И 17, на другой вход которого при равенстве кодов блок подает разрешающий потенциал. Счетный импульс проходит элемент И 17 и фиксируется в элементе 18 памяти, с первого выхода которого снимается сигнал медленной скорости, а на втором выходе появляется сигнал останова. .
Постоянные времени элементов 14 и 15 задержки выбраны таким образом, чтобы обеспечить минимально возможное вр,емя движения загруженного или разгруженного шгабелера на медленной скорости. Тормозной путь штабелера практически не равен кратному расстоянию между соседними ячейками.
При доставке штабелера выполняются предусмотренные программой операции (например, взять поставить тару).
; Предложенное устройство позволяет уменьшить время поиска, т.е. у.яучшить техник о-экономические показатели склада. При этом трудоемкий процесс наладки устройства упрощается за счет исключения датчика положения точной остановки
Формула изобретения Устройство .цля автоматического управления штабелёром, содержащее блок управления скоростью движения, последовательно соединенные блок задания адреса и схему дзавнений, один из входо которой соединен с первым выходом блока определения текущего адреса, последовательно соединенные блок формирования сигналов положения механизмов штабелёра и блок программного задаНИН ячеек и погрузочно-разгрузочных операций, входы которого соединены соответственное выходами блока зада1шя адреса, схемы сравнения и вторым выходом блока определения текущего адреса, а управляющие выходы соединены соответственно с управляющими входами схемы: срав не1ШЯ и блоков задания адреса, определения текущего адреса и управления приводами, отличающ е е с я тем, что, с целью повышения быстродействия, упрощения и снижения трудоемкости процесса настройки и регулировки устройства, в нем блок управления скоростью движения содержит элементы И, ИЛИ, памяти и задержки; причем первые входы двух элементов И соединены с соответствующими выходами блока формирования сигналов положения механизмов штабелера, вторые входы - с выходом схемы сравнения, а выходы - через соответствующие элементы задержки - со входами элемента ИЛИ, выход которого соединен с первым входом элемента памяти, второй вход которого соед1шен с выходом третьего элемента И, входы третьего элемента И подключены к соответствующему выходу блока программного задания адресов ячеек и погрузочно-разгрузочных операций и к третьему вцхрду блока определения текущей адреса; выходы :элемента памяти срединены со входами б.лока управления приводами.
Источники информации, принятые во внимание при экспертизе;
1..Авторское свидетельствоСССР № 394755, 1м.Кл. G05B 19/28от1971г.
2.Патент США N«3703556, кл. 340-172.5 М.Кл. 6 06 К 17/00, опубликован 1974 г.
3..Авторское свидетельство СССР № 257577 М.Кл. G05 /5/00 01 1968 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управленияшТАбЕлЕРОМ | 1978 |
|
SU819811A2 |
| Устройство для имитации работы автоматизированного склада | 1988 |
|
SU1714623A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
| Устройство для управления транспортным механизмом | 1981 |
|
SU1079562A2 |
| Устройство управления приводом механизма передвижения транспортного средства для обслуживания стеллажа | 1986 |
|
SU1402520A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| Устройство для автоматического определения состояния ячеек склада | 1987 |
|
SU1505846A2 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |