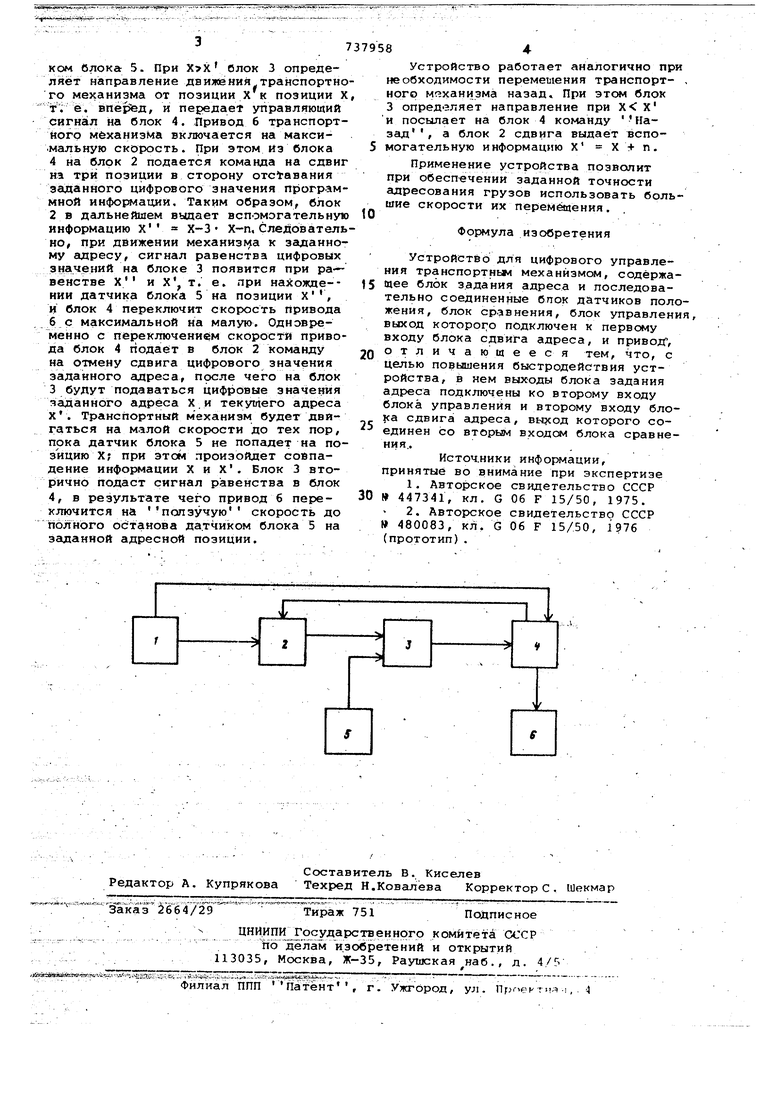
(54) УСТРОЙСТВО ДЛЯ ЦИФРОВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ Изобретение относится к области управления транспортными средствами и может быть использовано для управления механизмами внутрицехового и складского транспорта. Известно устройство для управления транспортными механизмами, содержащее последовательно соединенные блок заданий адреса, основной и вспомогательный блок сравнения, блок сдви га адреса, выход,которого подключен к основному блоку сравнения, блок управления Приводом, осйовной и вспомогательный датчики, подключенные к основ нему и .вспомогательному блокам сравнения соответственно 1. Известное устройство обладает низ, кой точностью при больших скоростях движения механизма. / Наиболее близким техническим решекием к изобретению является устройство для управления транспортным механизмом, содержащее блок задания адреса и последовательно соединенные блок датчиков положения, блок сравнейия, блок управления, выход которого подключен к первому входу блока сдвига адреса, и привод 2. Недостатком известного устройства является сложность электрической схеМЕХАНИЗМОМмы управления при заданнот быстрбдействии. . Цель изобретения - повышение быстродействия устройства при упрощении схемы управления. Цель достигается тем, что в устройствё ВЫХО.ЦЫ блока задания адреса подключены ко второму входу блока управления и второму входу блока сдвига адреса, выход которого соединен ей вторым входом блока сравнения. На чертеже представлена блок-схема предложенного устройства. Устройство содержит блок 1 задания адреса, блок 2 сдвига адреса, блок 3 сравнения, блок 4 управления, блок 5 датчиков положения и привод 6.. Устройство работает следующим образом. Предварительное переключение максимальной скорости привода на малую скорость должно произойти за п позиций до позиции останова.-С блока 1 на блок 2 подается заданная программная информация - заданный адрес (X), а на блок 4 - команда разрешения начала движения. Одновременно в блоке 3 происходит срав нение цифрового значения заданного адреса и цифрового значения текущего адреса X, ..считанного датчиком блока 5. При С5ЛОК 3 определяет н;аправление движения транспортно го механизма от позиции X к позиции X т; ё. , и передает управляющий сигнал на блок 4. -Привод 6 транспортного Механизма включается на макси.мальную скорость. При этом Из блока 4 на блок 2 полается команда на сдвиг на три позиции в сторону отс авания заданного цифрового значения программной информации. Таким образом, блок 2в дальнейшем въщает вспомогательную информацию X Х-3 Х-п. Следователь но, при движении механиз1ла к заданному адресу, сигнал равенства цифровых значений на блоке 3 появится при равенстве X и X, т. е. при нахояще-IНИИ датчика блока 5 на позиции X и блок 4 переключит скорость Привода максимальной на малую. Одновременно с переключением скоростей привода блок 4 подает в блок 2 команду на отмену сдвига цифрового значения заданного адреса, прсле чего на блок 3будут подаваться цифровые значения заданного адреса X.и текущего адреса X. Транспортный механизм будет двигаться на малой скорости до тех пор, пока датчик блока 5 не попадет на позицию X; при этом произойдет совпадение информации X и Х. Блок 3 вторично подаст сигнал равенства в блок 4, в результате чего привод 6 переключится на ползучую скорость до полного останова датчиком блока 5 на заданной адресной позиции. 7 84 Устройство работает аналогично при необходимости перемещения транспорт- , ного мг ханизма назад. При этом блок 3 опредэляет направление при Х X и посылает на блок 4 команду Назад, а блок 2 сдвига выдает вспомогательную информацию X Х п. Применение устройства позволит при обеспечении заданной точности адресования грузов использовать большие скорости их перемещения. Формула изобретения Устройство для цифрового управления транспортный механизме, содёржаtaee блок задания адреса и последовательно соединенные блок датчиков положения, блок сравнения, блок управления, выход которого подключен к первому входу блока сдвига адреса, и приводГ, отличающееся тем, что, с целью повышения быстродействия устройства, в нем вых-оды блока задания адреса подключены ко второму входу блока управления и второму входу блока сдвига адреса, вьрсод которого соединен со вторым входом блока сравнения... Источники инфогя ации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 447341, кл. G Об F 15/50, 1975. 2.Авторское свидетельство СССР 480083, кл, G 06 F 15/50, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортным механизмом | 1986 |
|
SU1343426A1 |
| Позиционная система программного управления перемещением транспортного механизма | 1983 |
|
SU1137476A2 |
| Позиционная система программного управления перемещением транспортного механизма | 1972 |
|
SU447341A1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Устройство управления приводом перемещения транспортного механизма | 1988 |
|
SU1661080A1 |
| Позиционная система программного управления перемещением транспортного механизма | 1973 |
|
SU480083A1 |
| Устройство для управления транспортным механизмом | 1981 |
|
SU1079562A2 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1198459A1 |
| Цифровая система позиционного регулирования | 1983 |
|
SU1124254A2 |
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
