Изобретение относится к системам управления механизмами внутризаводского транспорта, например кранами-штабелера- ми, каретками, автооператорами, тележками, транспортными манипуляторами автоматических линий и гибких производственных систем.
Цель изобретения - расширение функциональных возможностей за счет определения пути торможения при изменяющемся шаге между позициями и изменяющейся массе груза.
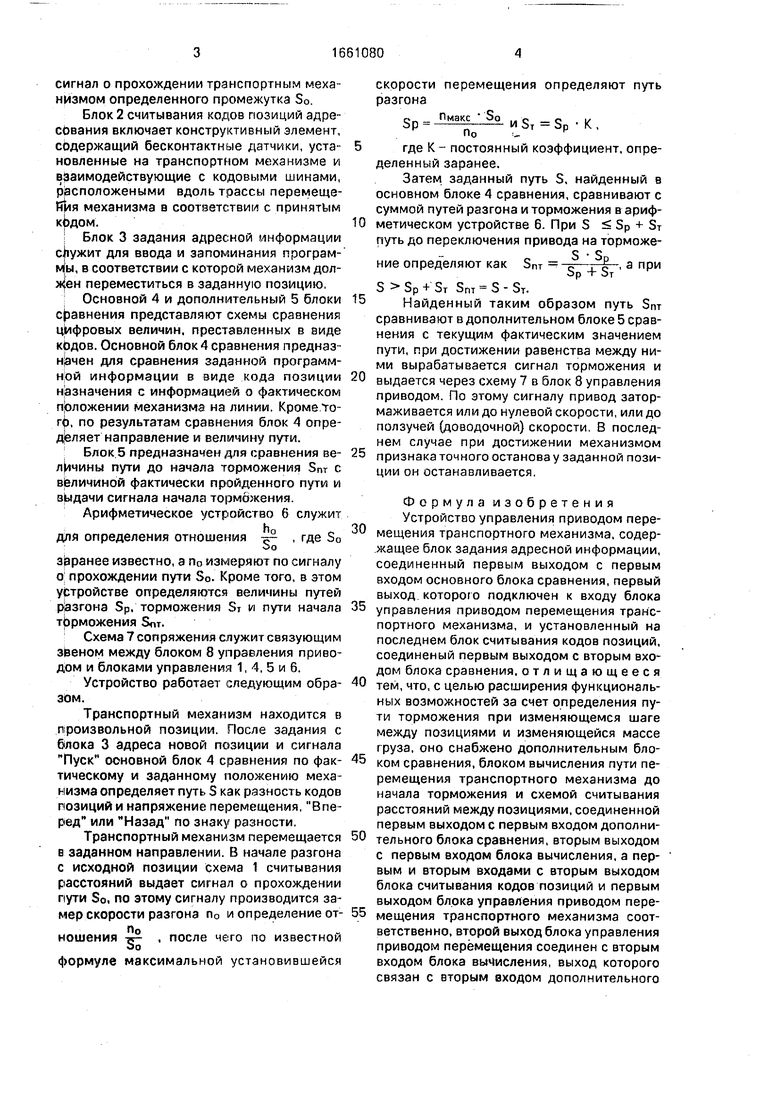
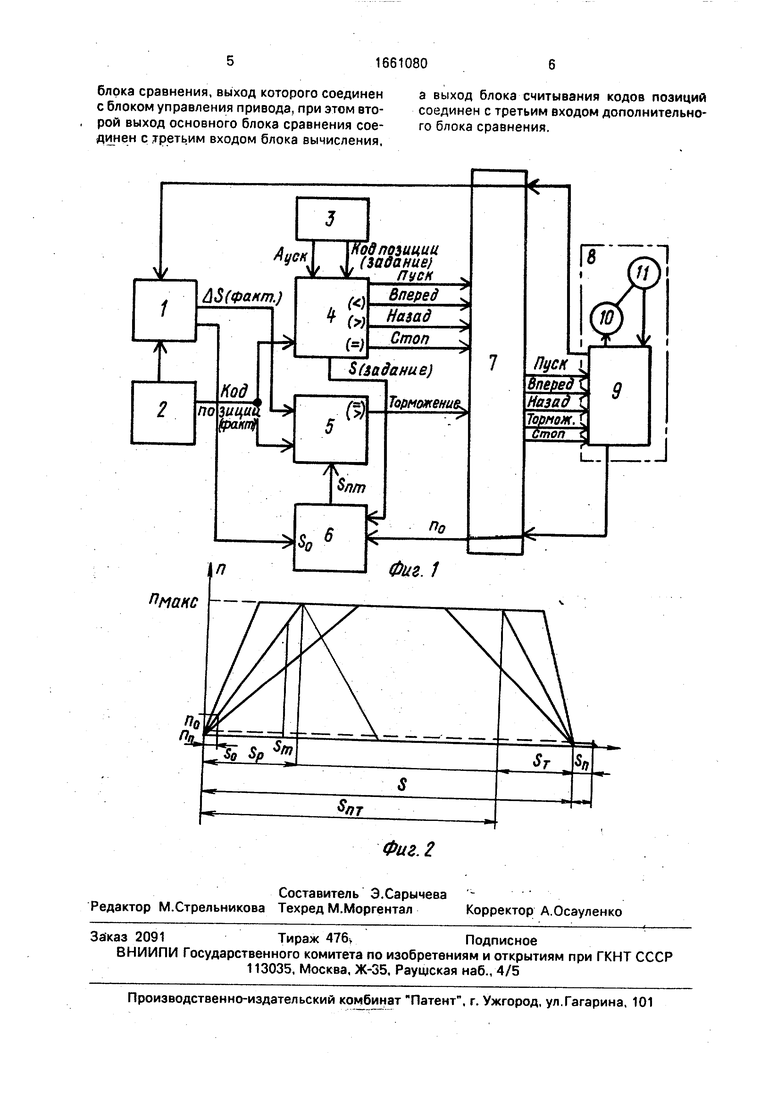
На фиг.1 дана структурная схема устройства управления приводом перемещения транспортного механизма; на фиг.2 - график изменения скорости механизма.
Устройство содержит схему 1 считывания расстояний между позициями адресования, путевой блок 2 считывания кодов
позиций адресования, блок 3 задания адресной информации, основной блок 4 сравнения, дополнительный блок 5 сравнения, арифметическое устройство 6, схему 7 сопряжения с блоком 8, включающим преобразователь 9, связанный с блоком 10 управления электродвигателем, соединенным с датчиком 11 скорости и пути.
Схема 1 считывания (измерения) расстояний между соседними позициями адресования по существу представляет счетчик импульсных сигналов и предназначена для. подсчета числа дискрет пути Д S. содержа-, щихся между соседними позициями адресования и получаемых от путевого датчика привода. При достижении признака точного останова на заданной позиции счет прекращается и возобновляется при движении по новому адресу. Кроме того, схема выдает
С
о о
00
о
сигнал о прохождении транспортным механизмом определенного промежутка So.
Блок 2 считывания кодов позиций адресования включает конструктивный элемент, содержащий бесконтактные датчики, установленные на транспортном механизме и взаимодействующие с кодовыми шинами, расположеными вдоль трассы перемеще- йИя механизма в соответствии с принятым кодом.
Блок 3 задания адресной информации служит для ввода и запоминания программы, в соответствии с которой механизм должен переместиться в заданную позицию.
Основной 4 и дополнительный 5 блоки сравнения представляют схемы сравнения цифровых величин, проставленных в виде кодов. Основной блок 4 сравнения предназначен для сравнения заданной программной информации в виде кода позиции назначения с информацией о фактическом положении механизма на линии. Кроме того, по результатам сравнения блок 4 определяет направление и величину пути.
Блок 5 предназначен для сравнения ве- лИчины пути до начала торможения 5Пт с величиной фактически пройденного пути и выдачи сигнала начала торможения.
Арифметическое устройство 6 служит
для определения отношения , где So
00
заранее известно, а пс) измеряют по сигналу о прохождении пути S0. Кроме того, в этом устройстве определяются величины путей разгона Sp, торможения 5т и пути начала торможения SOT.
Схема 7 сопряжения спужит связующим звеном между блоком 8 управления приводом и блоками управления 1, 4, 5 и 6.
Устройство работает следующим образом.
Транспортный механизм находится в произвольной позиции. После задания с блока 3 адреса новой позиции и сигнала Пуск основной блок 4 сравнения по фактическому и заданному положению механизма определяет путь S как разность кодов позиций и напряжение перемещения, Вперед или Назад по знаку разности.
Транспортный механизм перемещается в заданном направлении. В начале разгона с исходной позиции схема 1 считывания расстояний выдает сигнал о прохождении пути So, no этому сигналу производится замер скорости разгона По и определение отПо
& формуле максимальной установившейся
ношения
после чбто по известной
скорости перемещения определяют путь разгона
5
Sp
Пмаке So
По
к,
и 5т Sp
где К - постоянный коэффициент, определенный заранее.
Затем заданный путь S, найденный в
основном блоке 4 сравнения, сравнивают с
суммой путей разгона и торможения в ариф0 метическом устройстве 6. При S Sp + ST
путь до переключения привода на торможеS Sp
ние определяют как 5Пт
5
0
-, а при
Sp + ST S - Sp + ST Sni S - ST.
5 Найденный таким образом путь Зпт сравнивают в дополнительном блоке 5 сравнения с текущим фактическим значением пути, при достижении равенства между ними вырабатывается сигнал торможения и
0 выдается через схему 7 в блок 8 управления приводом. По этому сигналу привод затормаживается или до нулевой скорости, или до ползучей (доводочной)скорости. В последнем случае при достижении механизмом
признака точного останова у заданной позиции он останавливается.
Формула изобретения Устройство управления приводом перемещения транспортного механизма, содержащее блок задания адресной информации, соединенный первым выходом с первым входом основного блока сравнения, первый выход которого подключен к входу блока
5 управления приводом перемещения транспортного механизма, и установленный на последнем блок считывания кодов позиций, соединений первым выходом с вторым входом блока сравнения, отлищающееся
0 тем, что, с целью расширения функциональных возможностей за счет определения пути торможения при изменяющемся шаге между позициями и изменяющейся массе груза, оно снабжено дополнительным бло$ ком сравнения, блоком вычисления пути перемещения транспортного механизма до начала торможения и схемой считывания расстояний между позициями, соединенной первым выходом с первым входом дополни0 тельного блока сравнения, вторым выходом с первым входом блока вычисления, а первым и вторым входами с вторым выходом блока считывания кодов позиций и первым выходом блока управления приводом перемещения транспортного механизма соответственно, второй выход блока управления приводом перемещения соединен с вторым входом блока вычисления, выход которого связан с вторым входом дополнительного
блока сравнения, выход которого соединен с блоком управления привода, при этом второй выход основного блока сравнения соединен с третьим входом блока вычисления,
а выход блока считывания кодов позиций соединен с третьим входом дополнительного блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1198459A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Устройство для управления транспортными средствами | 1988 |
|
SU1589291A1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
| Адаптивная цифровая система управления электроприводом | 1985 |
|
SU1315938A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
Изобретение относится к системам управления механизмами внутризаводского транспорта. Цель изобретения - расширение функциональных возможностей за счет определения пути торможения при изменяющемся шаге между позициями и изменяющейся массе груза. При перемещении транспортного механизма по измеренной величине скорости на определенном начальном участке пути разгона механизма находят пути разгона и торможения (при переменной массе перевозимого груза) с последующим нахождением пути до момента переключения на торможение. Устройство состоит из блоков управления, выполняющих операции приема и хранения адресной информации, определения направления перемещения, измерения скорости в конце определенного отрезка пути, вычисления путей разгона, торможения и пути до переключения на торможение, выделения командных сигналов "Пуск", "Вперед", "Назад", "Торможение", "Стоп". 2 ил.
маис
ПА.
ft Г
с So Sp
/п
У/7Г
Sr S/
| Позиционная система программного управления перемещением транспортного механизма | 1973 |
|
SU480083A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Авторское свидетельство СССР № 757442, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
