1ri
Изобретение относится к области управления процессом флотации и может быть использовано при разработке и внедрении автоматизированньгх систем управления флотационными процессами на обогатительных фабриках угольной промьгашенности, при производстве минеральных удобрений,в цветной и черной металлургии.
Цель изобретения - повьппение точности управления путем повьппення извлечения полезного компонента в концентрат.
Сущность способа заключается в том, что готовый концентрат разделяют на две части, одна из которых йоз вращается в начало процесса,а другая выводится из процесса флотации. При возврате части концентрата в начало процесса вместе с частицами концентрата в голову процесса возвращается сорбированный на этих частицах реагент-собиратель. При этом на сфлоти- рованных частицах находится йе один монослой молекул реагента-собирателя, а несколько.
Связи между минеральными частицами с большим содержанием полезного компонента- и первым слоем иолекул реагента-собирателя Значительно сильнее, чем связи между первым слоем молекул и вторым и третьим и.т.д.
Таким образом при возврате части концентрата в начало процесса молеку ля второго, третьего и последующих монослоев молекул реагента-собирателя смыиаготся гораздо легче оборотной водой-При разбавлении концентрата, чем молекулы первого слоя.
В результате десорбции реагента- собирателя при возврате части концентрата количество реагента-собирателя в начальной операции флотации возрастает. Так как десорбция реагента собирателя происходит постепен jHo, то осуществляется постепенная добавка реагента-собирателя в каждой камере флотомашины при флотации. Это способствует повьшгению избирательности действия реагента-собирателя.
Распределенное по времени дополнительное воздействие собирателя способствует повьпнению извлечения полезного компонента в концентрат.
При качестве концентрата ниже заданного регулирование приращения доли концентрата, возвращаемой в начало процесса, пропорционально разнос62
. ти между залаиш.гм и измеренным содержаниями полезного компонента, что позволяет поддерживать качество концентрата на заданном уровне.
В этом случае управление ведется по отклонению.
При достижении заданного качества регулирование приращения этой доли
пропорционально разности между текущей и предшествующей величинами извлечения полезного компонента,что поз - воляет оптимизировать процесс флотации. В этом случае управление будет оптимальным.
Возврат части концентрата в начальную операцию флотации приводит к увеличению удельного количества сорбированного реагента на единице поверхности частиц с высоким,содержанием полезного компрнента. Поэтому необходимо корректировать возвращаемую долю обратно пропорционально расходу реагента-собирателя.
Регулирование приращения доли
флотоконцентрата, возвращаемой в начало процесса, обратно пропорционально расходу реагента-собирателя, что обеспечивает оптимальные условия для флотации частиц с высоким содержанием полезного компонента.
При низком качестве концентрата (ниже заданного уровня) приращение доли концентрата, возвращаемого в начало процесса, равно
,„ - .,i.
где fl и ft - заданное и измеренное содержания полезного
компонента; Q - расход реагента-собирателя;
К - коэффициентj определяемый из анализа сепарационной характеристики схемы;
К2 - коэффициент, зависящий от свойств реагента-собирателя (г/г) Когда качество концентрата вьщ1е заданного, эта доля равна
Лта.
..
К Q
5§
К„
.(Ег ) - - - где Е и. Е„р- текущее и предшествующее значения извлечемня полезного компонента в Концентрат; Kj - коэффициент, опредсля емьш сепарационной характеристикой схемы; К - коэффициент, определяемый экспериментально зависящий от свойств реагента-собирателя (г/г)- .
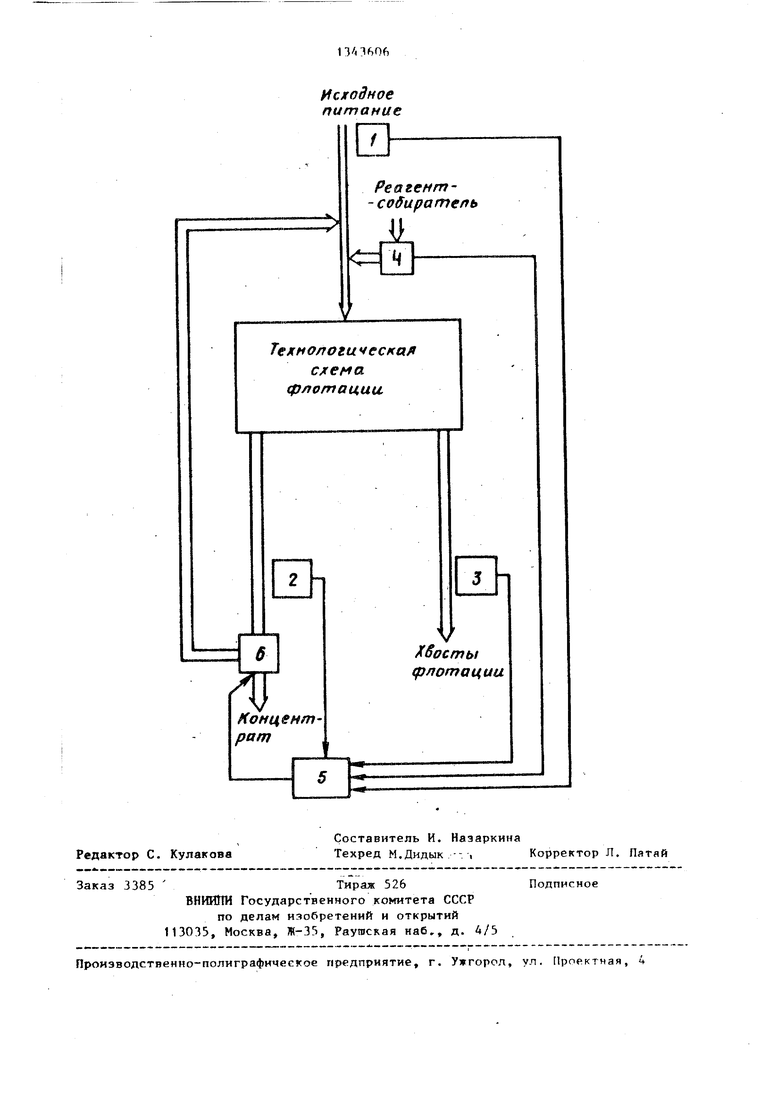
На чертеже показана блок-схема системы управления процессом флотации.
Система управления процессом флотации содержит измеритель 1 содержания полезного компонента в исходном питании, измеритель 2 содержания полезного компонента в концентрате, измеритель 3 содержания полезного компонента в хвостах, измеритель 4 расхода реагента-собирателя, регулятор 5, делитель 5 потока концентрата.,
Система работает следующим образом.
Измерители 1, 2 и 3 определяют содержание полезного компонента в исходном питании и продуктах обогащения.
В системе происходит расчет извлечения полезного компонента по известным соотношениям. Там же происходит сравнение качества концентра- та с заданн1ям. Если качество концентрата ниже заданного, регулятор 5 увеличивает приращение доли концентрата, возвращаемой в начало процесса на величину, прямо пропорциональную отклонению измеренного качества (сигнал с измерителя 2) от заданного и обратно пропорциональную расходу реагента-собирателя (сигнал с измерителя 4). Устройство работает с периодичностью от О, t до 4 f («- постоянная времени схемы), Указанным выше образом устройство управления добивается получения концентрата заданного качества, определяя на каждом шаге извлечение полезного компонента в концентрат..
После этого устройство начинает работать в оптимизационном реявте, оптимизируя извлечение полезного компонента в концентрат.
Если при этом происходит снижение качества концентрата ниже заданного, система переходит на регулирование
5
0
5
по отклоиемик клчестла коицентрлта от задапиог о.
Использование изобретения позволяет повысить выход и качество ггродук- тов o6br-aHkeHHH. Формула изобретения
Способ. управле(1Ия процессом флотации, включающий измерение и запоми- - нание текущего значения содержания полезного компонента в готовом концентрате, распределение циркулирующих потоков процесса по отдельным . операциям, изменение расхода реагента про1 орционально содержанию полезного компонента в готовом концентрате, определение и запоминание текущего значения извлечения полезного компонента в концентрат, отличающийся тем, что, с целью повышения точности управления путем повьше- ния извлечения полезного компонента в концентрат, долю готового концентрата возвращают в начальную операцию флотации, измеряют удельный расход реагента, определяют разность между заданным и текущим содержаниями полезного компонента в готовом концентрате, определяют отношение разности между заданным и измеренным содержав: киями полезного компонента в готовом концентрате к измеренному удельному расходу peat-eHTH, определяют разность между текущим и предшествующим значениями извлечения полезного компонента в концентрат, определяют отношение этой разности к удельному расходу реагента и, если разность между заданным и текущим измеренным содержаниями полезного компонента в концентрате больше нуля, то приращение доли готового концентрата, возвращаемого в начальную операцию флотации, изменяют пропорционально отношению разности между заданным и измеренным содержаниями полезного компонента в концентрате к удельному расходу реагента, а если разность между задан- . ным и текущим содержаниями полезного компонента в концентрате меньше нуля, то приращение доли готового концентрата, возвращаемого в начальную операцию флотации, изменяют пропорционально отношению разности между текущей и предшествующей величина-
5 ми извлечения полезного компонента в концентрат к удельному расходу реагента.
0
5
0
5
Исходное питание
Ре а ген т- coffupamenb

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессами измельчения и флотации | 1987 |
|
SU1510932A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ФЛОТАЦИИ | 2005 |
|
RU2286212C1 |
| Способ управления процессом обогащения | 1986 |
|
SU1402377A1 |
| Способ управления процессом флотации | 1981 |
|
SU1005918A1 |
| Способ управления процессом флотации | 1984 |
|
SU1233940A1 |
| СПОСОБ ОБОГАЩЕНИЯ ВЫСОКОШЛАМИСТЫХ КАЛИЙСОДЕРЖАЩИХ РУД | 2011 |
|
RU2467803C2 |
| СПОСОБ ОБОГАЩЕНИЯ СЛАБОМАГНИТНЫХ ЖЕЛЕЗНЫХ РУД | 2022 |
|
RU2791755C1 |
| Способ управления многостадийным процессом флотации | 1980 |
|
SU956023A1 |
| СПОСОБ ОБОГАЩЕНИЯ РУД | 1994 |
|
RU2095152C1 |
| Способ управления процессом флотации | 1986 |
|
SU1431842A1 |
Изобретение относится к флотационному обогащению на фабриках угольной пром-ти, в цветной и черной металлургии , в пром-ти производства минеральных удобрений.Цель изобретения - повьппение точности управления путем повьш1ения извлечения полезного Компонента (ПК) в концентрат (К). Готовый К разделяется на две части. Одна из них возвращается в начало процесса, а другая выводится из процесса флотации. При этом вместе с частицами К в голову процесса возвращается сорбированный на этих частицах реагент-собиратель (PC). В исходном питании, К и хвостах определяют содержание ПК| и расход PC. По измеренным значениям ,6j,,рассчитывают величину Е - извлечение ПК v К. Качество К сравнивают с заданным. Если качество К ниже заданного, упели- ивают приращение доли К, возвращаемой в начало процесса, на величину, прямо пропорциональную отклонению / и ОТ заданного и обратно пропорциональную расходу PC.- Управление в зтом случае ведется по отклонению. При достижении заданного качества К приращение доли К пропорционально разности между текущей и предшествующей величинами Е . Управление в случае оптимально. 1 ил. с 6 (Л со 4 00 о о О5
Технологи ческа/t
ел ем а ф/ютации
ги
Концентрат
V
Хвосты (рлотациа
Редактор С. Кулакова
Составитель И. Наэаркина
Техред М.Дидык --. , Корректор Л. Патай
3385
Тираж 526
ВНИИ11И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-33, Раушская иаб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Подписное
| Способ управления процессом флотации | 1982 |
|
SU1063465A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления процессом флотации | 1982 |
|
SU1080872A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
