Изобретение относится к автоматизации технологических процессов сельскохозяйственных машин, а именно к регулированию блоков рабочих аппаратов хлопкоуборочных, куракоуборочных и других машин ;по высоте.
Для того чтобы извлечь хлопок-сырец из НИЛ1НИХ коробочек растения, хлопкоуборочные аппараты должны быть опуш;ены в процессе работы машины на минимальные расстояния от новерхности грядки. Но так как рельеф грядки в процессе работы машины ностоянно изменяется по высоте, то для того, чтобы поддержать неизменное расстояние от грядки до уборочных аппаратов, необходимо непрерывно регулировать положение последних по высоте.
Суш,ествуюш,ая на хлопкоуборочных машинах конструкция лодвески рабочих аппаратов не обеспечивает требуемого копирования. Рабочие аппараты подвешены на рычагах и уравновешены пружинами так, что во время работы их полозья скользят по поверхности грядок. Кроме этого, копировка невозможна из-за большой массы блока уборочных аппаратов, которые при встрече с неровностями почвы оказьввают большое давление на нее и разрушают грядки. Водителю хлопкоуборочной машины трудно с заданной точностью копировать рельеф грядки рабочими аппаратами, поэтому он вынужден устанавливать их на заведомо большую высоту от поверхности
грядки, что снижает производительность машины. Задача осложняется еш,е и тем, что хлопкоуборочные аппараты многорядных широкозахватных машин разбиты на отдельные (одно- или двухрядные) секции (блоки), каждая из которых должна перемеш,аться независимо.
Известна конструкция устройства для автоматической копировки рельефа грядки рабочи.ми аппаратами хлопкоуборочной машины (патент США N° 1972847), содержандая копирующий щуп, связанный рычажной систе.мой с гидрораспределителями авто.матического уоращления и командным, гидроцилиндры, насос
и маслопроводы, обеспечивающие последовательное соединение с напорной магистралью гидрораспределителей автоматического управления. В предложенном устройстве для независимого копирования грядок каждым блоком рабочих аппаратов гидрораспределители автоматического управления снабжены дополнительными напорными полостями, параллельно подсоединенными к напорной магистрали гидросистемы и через клапаны постоянного расхода или дроссели - к гидроцилиндрам при подъеме рабочих аппаратов, а также сливными полостями, параллельно подсоединенными к сливной магистрали и гидроцилиндрам при
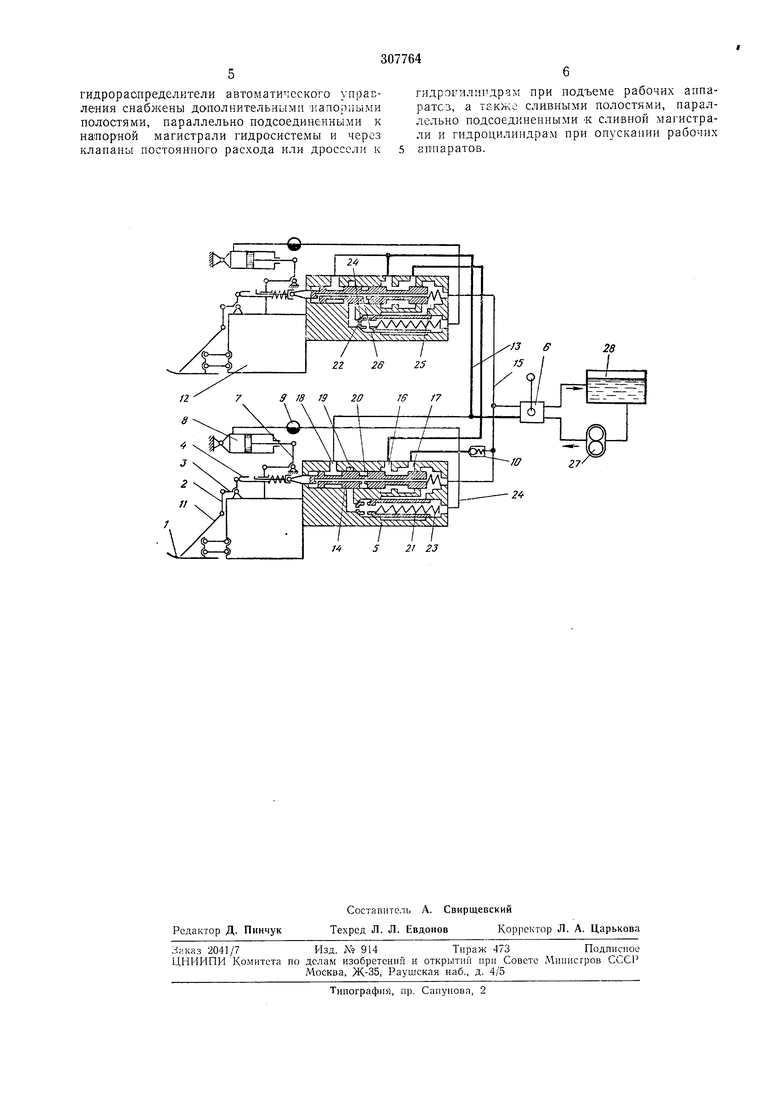
На чертеже изо,бражена гидравлическая схема устройства.
Оно содержит копирующие щупы 1 подвижно закрепленных на блоках и скользящих по грядке уборочных апнаратов системы рычагов и тяг 2, 3, 4, передающие -перемещения от щупов к гидрораспределителю 5 автоматического управления, жестко укрепленному на каждом блоке хлопкоуборочных аппаратов, тракторный (командный) гидрораснределитель 6, управляемый с места водителя, рычажную систему 7 подвески блоков уборочных аппаратов, гидроцилиндры 8 подъема блоков, а такл- е дроссельные устройства 9, обратные клапаны 10 и маслопроводы гидравлической системы устройства.
В процессе -перемещения хлопкоуборочной мащины вдоль грядок датчики кустоподъемников 11, скользя по поверхности грядки (два датчика устана вливаются с двух сторон от гребня грядки на безопасном для растений расстоянии), копируют ее рельеф.
Перемещение кустонодъемников через систему рычагов и тяг передается золотнику гидрораопределителя. Последний управляет гидроцилиндром, который с помощью рыча/кной лодвески перемещает блок рабочих аппаратов 12 в соответствии с 1неремещениями полозьев-датчиков. Независимость перемещения вверх каждого блока аппаратов (количество блоков неогра«ичено) происходит за счет того, что напорная магистраль 13 (изображена на чертеже утолщенной линией), последовательно подведенная к каждому гидрораспределителю, перекрывается любым золотником 14 при перемещении его в сторону подъема блока рабочих аппаратов и тем самым отсекается поток рабочей жидкости от сливной магистрали 15 (в корпусе распределителя полости 16 и 17 разъединяются, а полости 18 и 19 соединяются). Таким образом, при срабатывании на подъем хотя бы одного золотника в напорной магистрали 13 появляется давление, способное с помощью гидроцилипдров поднять любой блок рабочих аппаратов или все блоки вместе. Независимое опускание любого блока аппаратов при перемещении золотника в сторону онускания (полость 19 при этом соединяется с полостью 20) нроисходит под действием веса блока за счет сообщения рабочей полости любого гидроцилиндра со сливной магистралью 15 так, что дросселируемый слив рабочей жидкости из одного гидроцилиндра может происходить независимо от работы любого другого гидроцилиндра. Таким образом происходит копирование рельефа грядки каждым в отдельности блоком рабочих аопаратов.
Необходимая скорость подъема каждого блока аппаратов достигается с помощью клапана постоянного расхода 21, установленного в корпусе каждого гидрораспределителя. Необходимая скорость опускания каждого блока аппаратов определяется дроссельным отверстием 22 в клапане постоянного расхода, который под действием давления в гидроцилиндре и усилия пружины 23 перемещается до упора кольцевой кромкой в гнездо клапана и изолирует упомянутое дроссельное отверстие от остальных так, что рабочая жидкость может проходить только через него. В среднем положении золотника, как изображено на чертеже, рабочая жидкость, поступающая от тракторного гидрораснределителя, например
Р40/75В, беапрепятственно проходит по напорной магистрали, последовательно подходя к каждому гидрораспределителю, проходит через обратный клапан, а через сливную магистраль снова подводится к гидрораспределителю 6. Гидромагистраль 24 и рабочая полость гидроцилиндра лри этом заперты так, что блок уборочных аппаратов неподвижно фиксируется в определенном положении. Ори изменении гидрораспределителем 6 направления потока рабочей жидкости в магистралях 13 и 15 на обратное (подъем рабочих аппаратов в транспортное положение) в магистрали 15 и в полостях 25 всех гидрораспределителей 5 создается давление (клапан 10
при этом запирается), которое выталкивает золотники 14 до того, как полости 19 и 20 будут сообщаться. Рабочая жидкость по магистрали 24 поступает в рабочие полости гидроцилиндров 8. Происходит одновременный
подъем всех рабочих блоков. Скорость подъема блоков при этом определяется дроссельным отверстием 26 в золотнике 14. Для одновременного нодъема всех блоков рабочих аппаратов во всех гидромагистралях 24 установлено регулируемое дроссельное устройство 9. Возможная разница .в весе блоков, а также в сопротивлениях их -перемещению компенсируется дополнительным давлением, создаваемым этим устройством с уменьщением дроссельного отверстия. Дроссельное отверстие регулируется в дроссельном устройстве, установленном в гидросистеме -наиболее легкого блока аппаратов. Гидросистема питается рабочей жидкостью от гидронасоса 27 и бака 28.
Применение устройства для независимого автоматического копирования рельефа грядки отдельными блоками рабочих аппаратов позволит применить в хлопководстве высокопроизводительные многорядные щнрокозахватные
хлопкоуборочные мащины.
Предмет изобретения
Устройство для автоматического копировакия рельефа грядки рабочими аппаратами, например хлопкоуборочной мащины, содержащее копирующий щуп, связанный рычажной системой с гидрораспределителями автоматического управления и командным, гидроцилиндры, насос и |Маслопроводы, обеспечивающие последовательное соединение с напорной магистралью гидрораспределителей автоматического управления, отличающееся тем, что, с целью обеспечения независимого копрования грядок каждым блоком рабочих аппаратов,
гидрораопределители автоматического управления снабжены дополнительными :iianopJibiMH полостями, параллельно подсоединенными к на порной магистрали гидросистемы и через клапаны постоянного расхода или дроссели к
гидроиилшдрам при подъеме рабочих аппаратсз, а также сливными полостями, параллельно подсоединенными « сливной магистрали и гидроцилиндрам при опускании рабочих аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1972 |
|
SU352617A1 |
| Хлопкоуборочная машина | 1986 |
|
SU1344279A1 |
| Устройство для автоматического копирования рельефа почвы | 1972 |
|
SU467722A1 |
| Устройство для автоматического копирования рельефа почвы | 1978 |
|
SU682167A1 |
| Устройство для управления самоходной уборочной машиной | 1979 |
|
SU879060A1 |
| Устройство для стабилизации глубины хода подкапывающих органов корнеклубнеуборочной машины | 1988 |
|
SU1563608A1 |
| Устройство для автоматического копирования рельефа почвы | 1973 |
|
SU682176A2 |
| Гидросистема свеклоуборочного комбайна | 1983 |
|
SU1119619A2 |
| Механизм навески аппаратов хлопкоуборочной машины | 1980 |
|
SU925262A1 |
| Приспособление для копирования рельефа грядок к хлопкоуборочной машине | 1976 |
|
SU581902A1 |