Изобретение относится к области автоматизации технологических процессов сельскохозяйственных машин, в частности для регулирования рабочих анпаратов хлонкоуборочных и других машин но высоте.
Для того чтобы извлечь хлопок-сырец из нижних коробочек куста хлопчатника, хлопкоуборочные аппараты должны быть опущены в процессе работы машины на минимально возможное расстОЯние от поверхности грядки. Но рельеф грядки в процессе работы машины постоянно изменяется по высоте, поэтому, чтобы поддержать неизменное минимальное расстояние от грядки до уборочных аппаратов, необходимо непрерывно регулировать положение последних по высоте. Водителю хлопкоуборо-чной машины практически невозможно с необходимой точностью обеспечить копировку рельефа грядки рабочими аппаратами, поэтому он вынужден устанавливать их на заведомо большую высоту от поверХности грядки, что снижает производительность машины. Задача осложняется еще и тем, что хлопкоуборочные аппараты многорядных машин разбиты на отдельные (одно или двухрядные) секции (блоки), каждая из которых должна перемеш.аться независимо.
ратами хлопкоуборочной машины, содержашие копирующий шуп, связанный рычажной системой с гидрораспределителями автоматического управления, снабженными дополнительными напорными полостями, параллельно подсоединенными к .напорной магистрали гидросистемы и через клапаны постоянного расхода или дросселей к гидроцилиндрам одностороннего действия при подъеме рабочих аппаратов, а также сливными полостями, последо1вательно и параллельно нодсоединенными к сливной магистрали и гидроцилиндрам при опускании рабочих аппаратов.
Недостатком известных устройств является то, что рабочая жидкость постоянно вытекает под давлением, создаваемым весом апнаратов, через зазоры между золотннком и корпусом золотниКа из напорной магистрали в сливную. Поскольку давление от веса анпаратов значительно (60-70 KZCJCM, то эти утечки значительны, и рабочие аппараты опускаются в тот момент, когда золотники распределителей автоматического управления находятся в нейтральном положении, т. е. когда аппараты идут по ровной грядке и не требуется их регулировка по высоте.
Как показали испытания, около 50% включений устройства на подъем рабочих аппаратов происходят в результате указаиных утечек в гидрораспоедрлителях автоматического
управления. Это, в свою очередь, приводит к Н1;нужной интевсивной работе узлов устройciria для автоматического копирования, а значит к преждевременному выходу их из строя.
С целью ликвидации утечек рабочей жидкости из рабочих полостей гидроцилиндров через зазоры гидрораспределителей автоматического управления в предлагаемом устройстве для автоматического копирования рельефа грядки каждый гидрораспределитель автоматического управления снабжен запорным клапаном и плунжером, при этом полость под торцом плунжера соединена с полостью установки золотника каналом, золотник снабжен радиальным и осевым отверстиями, сообщающимися -в его нейтральном положении с каналом, подведенным в полость под торец плунжера, золотник и корпус распределителя снабжены кольцевыми проточками, соединяющими полость плунжера с напорной полостью в смещенном положении золотника для опускания рабочих аппаратов, а также кольцевыми поясками, перекрывающими последовательно подведенную напорную дмагистраль в смещенном для опускания рабочих аппаратов положении.
С целью стравливания части рабочей жидкости из полости под торцом плунжера в предлагаемом устройстве в корпусе распределителя имеется отверстие, сообщающее подводящую и отводящую ветви наиорной магистрали, последовательно .подведенной к каждому распределителю в смещенном для опускания рабочих аппаратов положении золотника.
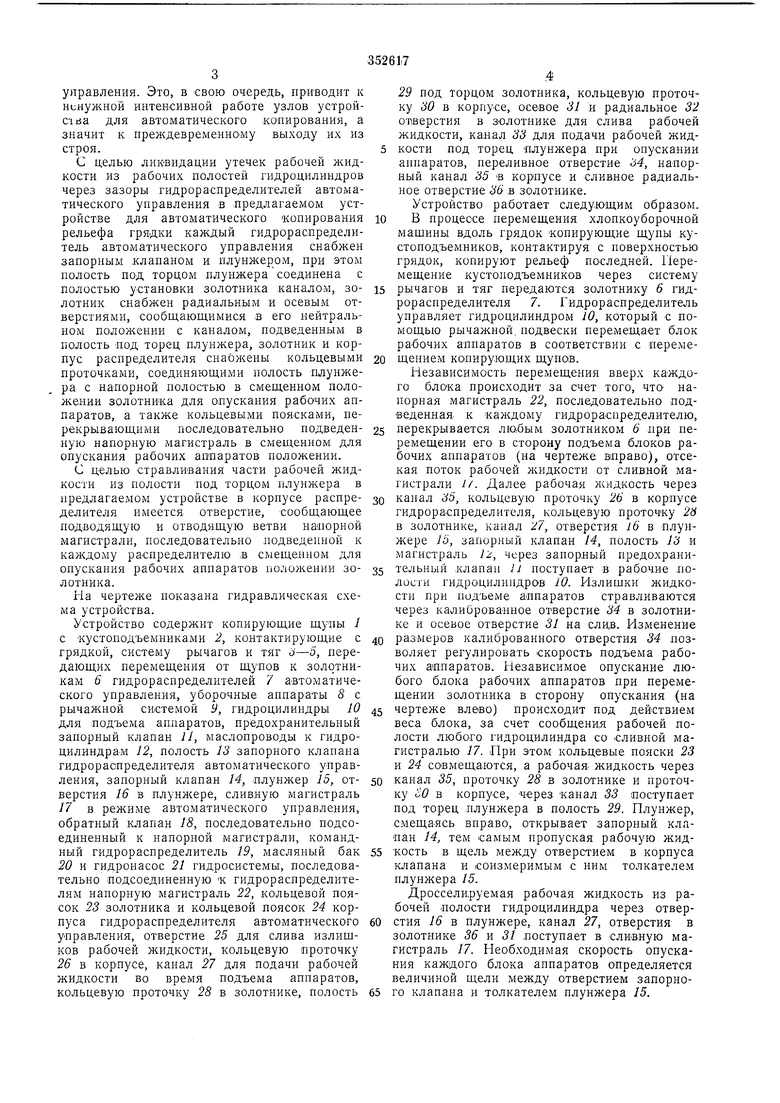
На чертеже показана гидравлическая схема устройства.
Устройство содержит копирующие щупы 1 с -кустоподъемниками 2, контактирующие с грядкой, систему рычагов и тяг и-5, передающих перемещения от щупов к золотникам 6 гидрораспределителей 7 автоматического управления, уборочные аппараты 8 с рычажной системой 9, гидроцилиндры 10 для подъема аппаратов, предохранительный запорный клапан 11, маслопроводы к гидроцилиндрам 12, полость 13 запорного клапана гидрораспределителя автоматического управления, запорный клапан 14, плунжер 15, отверстия 16 в плунлсере, сливную магистраль 17 в режиме автоматического управления, обратный клапан 18, последовательно подсоединенный к напорной магистрали, командный гидрораспределитель 19, масляный бак 20 и гидронасос 21 гидросистемы, последовательно подсоединенную к гидрораспределителям нанорпую магистраль 22, кольцевой поясок 23 золотника и кольцевой поясок 24 корпуса гидрораспределителя автоматического управления, отверстие 25 для слива излищков рабочей л идкости, кольцевую проточку 26 в корпусе, канал 27 для подачи рабочей жидкости во время подъема аппаратов, кольцевую проточку 28 в золотнике, полость
29 под торцом золотника, кольцевую проточку 30 в корпусе, осевое 31 и радиальное 32 опверстия в золотнике для слива рабочей жидкости, канал 33 для подачи рабочей жид5 кости под торец плунжера при опускании аппаратов, переливное отверстие о4, напорный канал 35 в корпусе и сливное радиальное отверстие 36 в золотнике. Устройство работает следующим образом.
10 В процессе перемещения хлопкоуборочной мащины вдоль грядок копирующие щупы кустоподъемников, контактируя с поверхностью грядок, копируют рельеф последней. Перемещение кустоподъемников через систему
5 рычагов и тяг передаются золотнику 6 гидрораснределителя 7. Гидрораспределитель управляет гидроцилиндром Ю, который с помощью рычажной, подвески перемещает блок рабочих аппаратов в соответствии с переме0 щепием копирующих щупов.
Независимость перемещения вверх каждого блока происходит за счет того, что напорная магистраль 22, последовательно подведенная к каждому гидрораспределителю,
5 перекрывается лю,бым золотником 6 при перемещении его в сторону подъема блоков рабочих аппаратов (на чертеже вправо), отсекая поток рабочей жидкости от сливной магистрали 1/. Далее рабочая жидкость через
0 канал 35, кольцевую проточку 26 в корпусе гидрораспределителя, кольцевую проточку 2Я в золотнике, канал 27, отверстия 1б в плунжере 15, запорный клапан 14, полость 13 и магистраль 12, через запорный предохранительный .клапап И поступает в рабочие полости гидроцилиндров 10. Излишки жидкости при подъеме аппаратов стравливаются через калиброванное отверстие 34 в золотнике и осевое отверстие 31 на сли,в. Изменение
0 размеров калиброванного отверстия 34 позволяет регулировать скорость подъема рабочих аппаратов. Независимое опускание любого блока рабочих аппаратов при перемещении золотника в сторону опускания (на
5 чертеже влево) происходит под действием веса блока, за счет сообщения рабочей полости любого гидроцилипдра со сливной магистралью 17. При этом кольцевые пояски 23 и 24 совмещаются, а рабочая жидкость через
0 канал 35, проточку 28 в золотнике и проточку 30 в корпусе, ч-ерез канал 33 поступает под торец плунжера в полость 29. Плунжер, смеща ясь вправо, открывает запорный кллпан 14, тем самым пропуская рабочую жидкость в щель между отверстием в корпуса клапана и соизмеримым с ним толкателем плунжера 15.
Дросселируемая рабочая жидкость из рабочей полости гидроцилиндра через отвер0 стия 16 в плунжере, канал 27, отверстия в золотнике 36 и 31 поступает в сливную магистраль 17. Необходимая скорость опускания каждого блока аппаратов определяется величиной щели между отверстием запорного клапана и толкателем плунжера 15.
Для стравливания части жидкости, пс ступающей под торец плунжера в полость 29, в корпусе золотника имеется отвер-стие 25, которое определяет величину необходимого давления для смещения .плунжера вправо и открывания запорного кл-апана 14.
В среднем положении золотника, как изображено на чертеже, рабочая жидкость, поступающая от тракторного (комаидного) гидрораопределителя 19, например Р 40/758, беспрепятственно -проходит по напорной магистрали 22, последовательно подходя к каждому гидрораспределителю, проходит через обратный клапан и через сливную магистраль 17 снова подводится к гидрораспределителю 19. Гидромагистраль 12 и рабочая полость гидроцилиндров при этом заперты запорНым клапаном 14 так, что блок уборочных аппаратов неподвижно фиксируется в определенном положении.
При изменении гидрораспределителем 19 направления потока рабочей жидкости на обратное подъем рабочих аппаратов в транспортное полож-ение в магистрали 17 снижается давление, и рабочая жидкость через отверстия 31 к 36 в золотнике, открывая запорный клалан 14, .поступает в рабочие полости гидроцилиндров, заставляя последний поднимать блок уборочных аппаратов.
Питание рабочей жидкостью гидросистемы осуществляется с помощью гидронасоса и бака.
Предмет изобретения
1. Устройство для автоматического копирования рельефа грядки рабочими аппаратами, например хлопкоуборочной машины, содержащее копирующий щуп, связанный рычажной системой с гидрораспределителями автоматического управления, снабженными дополнительными напорными полостями, параллельно подсоединенными к напорной магистрали гидросистемы и через клапаны постоянного расхода или дроссели к гидроцилиндрам одностороннего действия при подъеме рабочих а-ппаратов, а также сливными полостями, последовательно и параллельно подсоединенными к сливной магистрали и
гидроцилиндрам при опускании рабочих аппаратов, отличающееся тем, что, с целью ликвидации утечек рабочей жидкости из рабочих полостей гидроцилиндров через зазоры гидрораспределителей автоматического
управления, в каждом гидрораспределителе имеется запорный клапан и плунжер, при этом полость под торцом плунжера соединена с полостью установки золотлика каналом, золотник снабжен радиальным и осевым отверстиями, сообщающимися в его нейтральном положении с каналом, подведенным в полость под торец плунжера, золотник и корпус распределителя снабжены кольцевыми проточками, соединяющими полость
плунжера с напорной полостью в смещенном для опускания рабочих аппаратов положении золотника, а также кольцевыми поясками, перекрывающими последовательно подведенную напорную магистраль в смещенном
для опускания рабочих аппаратов положении.
2. Устройство по п. 1, отличающееся тем, что, с целью стравливания части рабочей жидкости из полости под торцом плунжера,
в корпусе распределителя имеется отверстие, сообщающее подводящую и отводящую ветви напорной магистрали, последовательно подведенной к каждому распределителю в смещенном для опускания рабочих аппаратов положении золотника. IS w I ff ixf
20 15 i I I

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1971 |
|
SU307764A1 |
| Устройство для автоматического копирования рельефа почвы | 1978 |
|
SU682167A1 |
| Хлопкоуборочная машина | 1986 |
|
SU1344279A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАКТОРА | 1972 |
|
SU328845A1 |
| Устройство для автоматического копирования рельефа почвы | 1972 |
|
SU467722A1 |
| Уплотнитель хлопка | 1986 |
|
SU1405724A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1983 |
|
SU1165249A2 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1975 |
|
SU668636A1 |
| Устройство для междурядной обработки почвы | 1975 |
|
SU662031A1 |

