Изобретение относится к MauiviHo- стросиию, к устройствам автоматиза- ид1И технологических процессов в элек TPOHHOJI ipoMbiuuienHocTH, в частности к устройстпам для поштучной выдачи изделий в зону приема технологического оборудования, преимущественно для роторных и роторно-конвейерных машин.
Целью изобретения является повышение пpoизвoдитeJIь iocти.
Поставленная пель достигается за счет поштучной выдачи изделий электронной промышленности типа кристаллов, переходов, компенсаторных диско обладающих малой жесткостью и невозможностью поштучноГ пьщачи из наоа- лл п (прер1 1впГ)М, без выстоя, перемещении MX в зону приема техиологиЧ (. с к о г о обор У71 о п ЛИИ я .
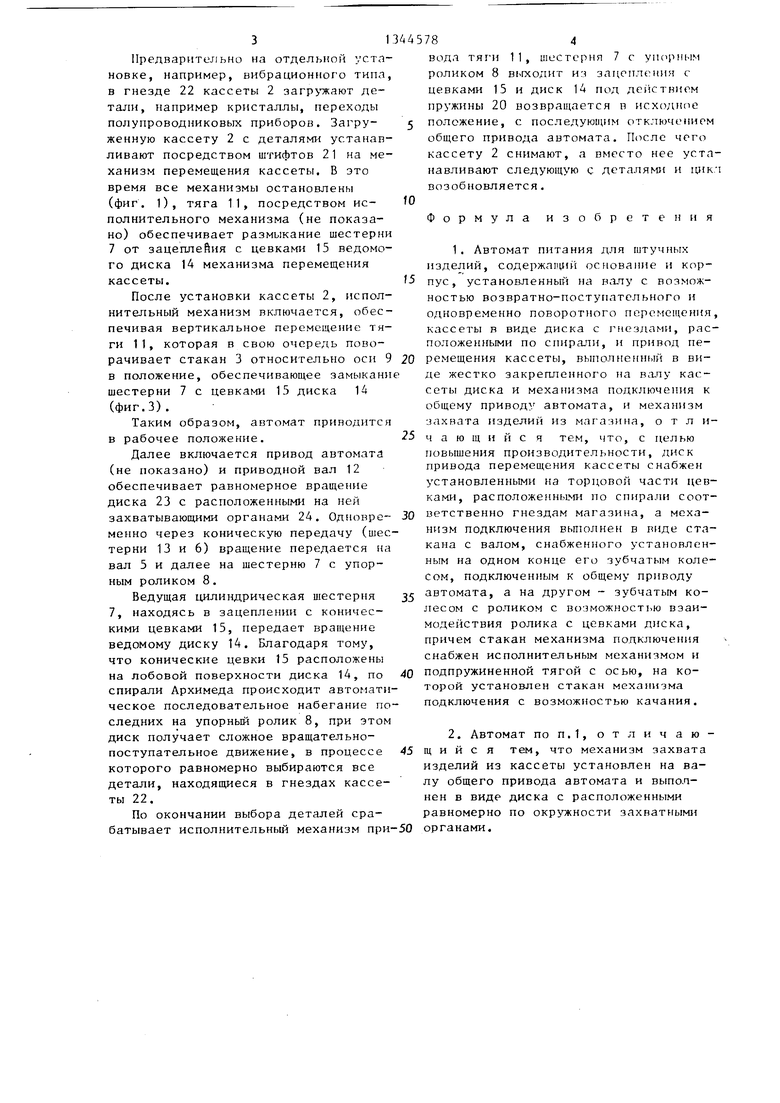
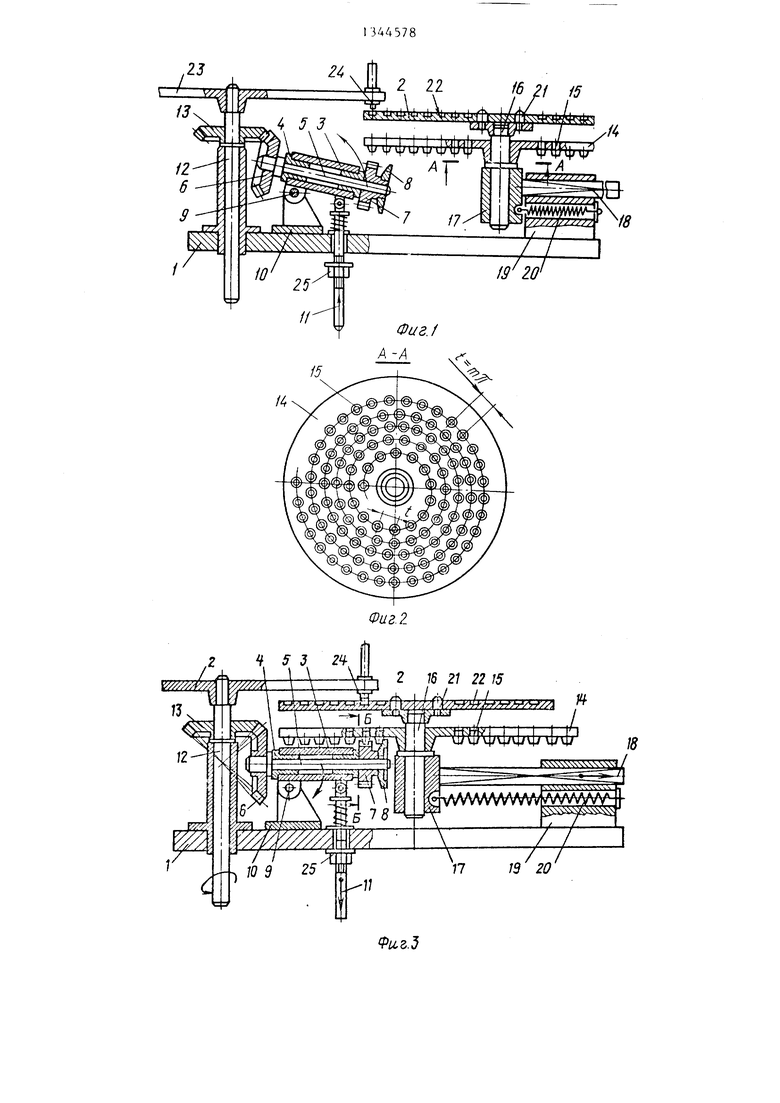
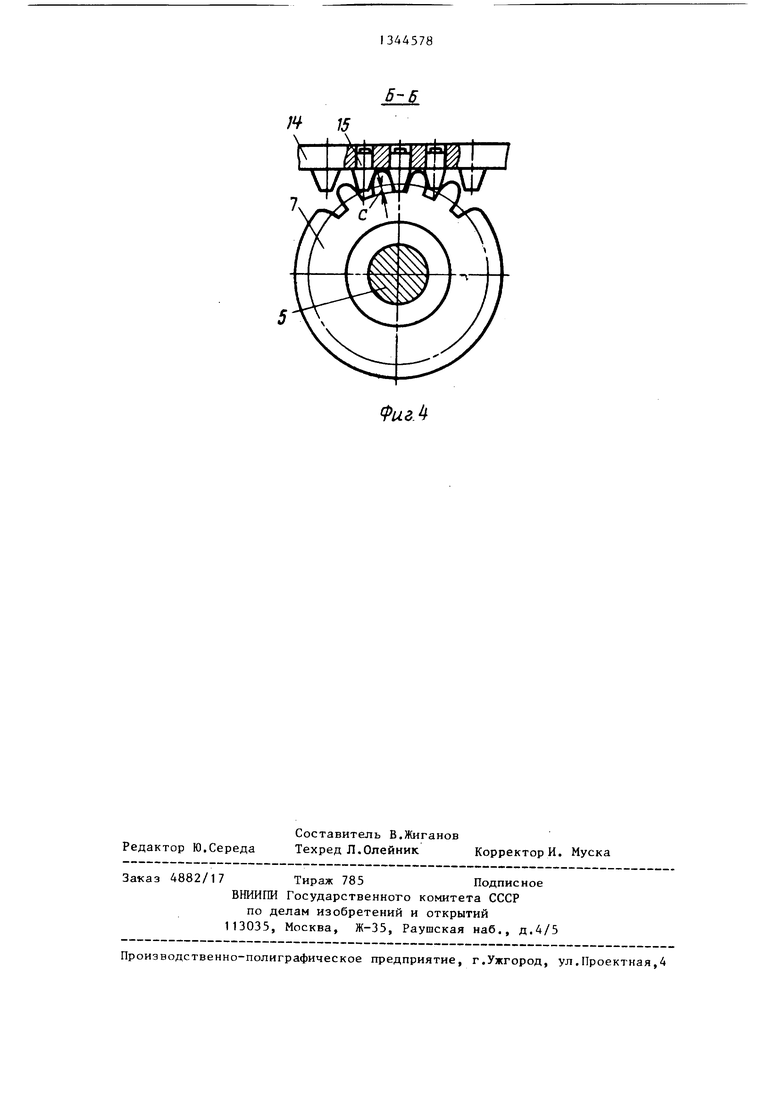
На фиг. 1 схематически изображе { пптом. нач.- ЛЫ Ы момент работы; ил |1}иг. 2 - течение Л-А на фиг. 1 (r-,-;,oNtoe с расположенными на iicr- цев слми) ; на фиг. 3 - схема автомата, рабочий момент; на фиг. 4 - се чеи.ие Н-В на . 3 (зацепление ведущего Ko. г депками ведомого коле- .л).
AirroMBT пит гии я дня пои1тучных из- iii-iHi;) CiH-ToiiT из ocHOBaiiiiH 1, на коjNi yi | ;и1онлен1.1 мехр.низм подклк)че- клгсеть 2, мс ханизм перемещения к..сг 2 с .-ями (не показаны), Mi:x,iiiit гч ;1еремещс:ния деталей из касOuTLI 2 ,
. 4ехл :ичм подк:;ючепия кассеты 2 состоит из стакана 3, внутри которого на опорах 4 ус:тановлен вал , на одном которого расположено коническое .убчатс е колесо 6, а на другом - цилиндрическое зубчатое колесо 7. На ступице колеса 7 закреплен упорный ролик 8. Стакан 3 с колесами 6 и 7 имеет возможность качания на оси 9 относитально кронштейна 10, закрепленного на основанир 1 посредством подпру;киненной тяги 1 1 , которая riepefteiuaeTCH от псполнительног о устройства (пе показано) известной кон- с трукцип.
Коническое колесо 6 имеет постоянную кинематическую связь с приводным влдом 12 посредством колеса 13. Вал 12 в а11мг)снязан с общим приводом автомата (iie показан).
Механизм переметдения Kacceriii 2 с деталям) состоит из ведомого диска
14, снабженного цевками 15, которые расположены на лббовой поверхности по спирали Архимеда с шагом по хорде t m T(m- модуль цилиндрической шестерни 7, имеющей возможность кинематической связи с шестерней 7).
Ведомый диск 14 закреплен на валу 16, который расположен в опоре 17.
Опора 17 имеет возможность продольного перемеш,ения посредством направляющей 18 относительно неподвижной стойки 19.
Для обеспечения контакта цевок 15 с упорным роликом 8 и возврата диска 14 в исходное положение служит пружина 20.
Поверх диска 14 на валу 16 установлена кассета 2 посредством штифтов 21, Кассета 2 снабжена гнездами 22 для размещения деталей, расположенных по спирали Архимеда в соответствии с расположением цевок 15
на ведомом диске 14.
Механизм захвата деталей из кассеты 2 состоит из диска 23, имеющего равномерно расположенные по окружности захватные органы 24, например, в
виде вакуумных захватов известной конструкции, обеспечивающих захват деталей из гнезда 22 кассеты 2 и перенос их к технологическому оборудованию. Количество захватных органов
24 соответствует количеству зубьев шестерни 7 при i 1 зубчатой пары конических шестерен 6 и 13.
Для обеспечения плавности хода при зацеплении зубьев шестерни 7 с
цевками 15, последние выполнены в виде усеченного конуса с параметрами нормального модульного зацепления, с центральным углом 2ot 40 и высотой Н 2,25(Л| - угол профиля в
нормальном сечении). При этом упорньй ролик 8 имеет на боковой поверх- ности скос л 20 , обеспечивающий постоянство контакта по образующей конуса с цевками 15.
Передаточное число зубчатой пары 13 и 6 равно 1 (i 1).
Для обеспечения установки нормального радиального зазора (фиг. 4) между шестерней 7 и цевками 15 имеется
регулируемый упор 25, расположенный на тяге 11, взаимосвязанной со стаканом 3.
Автомат работает следующим образом.
31
Предварительно на отдельной установке, например, вибрационного типа, в гнезде 22 кассеты 2 загр ткают де- Tajni, например кристаллы, переходы полупроводниковых приборов. Загру- женную кассету 2 с деталями устанавливают посредством штифтов 21 на механизм перемещения кассеты. В это время все механизмы остановлены (фиг. 1), тяга 11, посредством ис- полнительного механизма (не показано) обеспечивает размыкание шестерни 7 от зацеплейия с ueBKaNfn 15 ведомого диска 14 механизма перемещения кассеты.
После установки кассеты 2, исполнительный механизм включается, обеспечивая вертикальное перемещение тяги 11, которая в свою очередь поворачивает стакан 3 относительно оси 9 в положение, обеспечивающее замыкани шестерни 7 с цевками 15 диска 1Д (фиг.З).
Таким образом, автомат приводится в рабочее положение.
Далее включается привод автомата (не показано) и приводной вал 12 обеспечивает равномерное вращение диска 23 с расположенными на ней захватывающими органами 24. Одновре- менно через коническую передачу (шестерни 13 и 6) вращение передается на вал 5 и далее на шестерню 7 с упорным роликом 8.
Ведущая цилиндрическая шестерня 7, находясь в зацеплении с коническими цевками 15, передает вращение ведомому диску 14. Благодаря тому, что конические цевки 15 расположены на лобовой поверхности диска 14, по спирали Архимеда происходит автоматическое последовательное набегание последних на упорный ролик 8, при этом диск получает сложное вращательно- поступательное движение, в процессе которого равномерно выбираются все детали, находящиеся в гнездах кассеты 22.
По окончании выбора деталей срабатывает исполнительньш механизм при
5784
вода тяги 1 1 , шестерня 7 с упс рмим роликом 8 В11ГХОДИТ из зацепления с цевками 15 и диск 14 под действием пружины 20 возвращается п исходное положение, с последующим отключением общего привода автомата. После чего кассету 2 снимают, а вместо нее устанавливают следующую с деталями и цик возобновляется.
Формула изобретения
1. Автомат питания для штучных изделий, содержанц основание и корпус, установленный на валу с возможностью возвратно-поступательного и одновременно поворотного перемещения кассеты в виде диска с гнездами, расположенными по спирали, и привод перемещения кассеты, выполненн 1й в виде жестко закрепленного на ва.пу кассеты диска и механизма подключения к общему привод / автомата, и механизм захвата из магазина, о т л и ч а ю щ и и с я тем, что, с целью повышения производительности, диск привода перемещения кассеты снабжен установленными на торцовой части цевками, pacпoлoжeнньL IИ по спирали соответственно гнездам магазина, а механизм подключения вьяюлнен в виде стакана с валом, снабженного установленным на одном конце его зубчатым колесом, подключенным к общему приводу автомата, а на другом - зубчатым колесом с роликом с ВОЗМОЖНОСТ11Ю взаимодействия ролика с цевками диска, причем стакан механизма подключения снабжен исполнительным механизмом и подпружиненной тягой с осью, на которой установлен стакан механизма подключения с возможностью качания.
2. Автомат по п.1, отличающий с я тем, что механизм захвата изделий из кассеты установлен на валу общего привода автомата и выполнен в виде диска с расположенны.ми равномерно по окружности захватными органами.
.23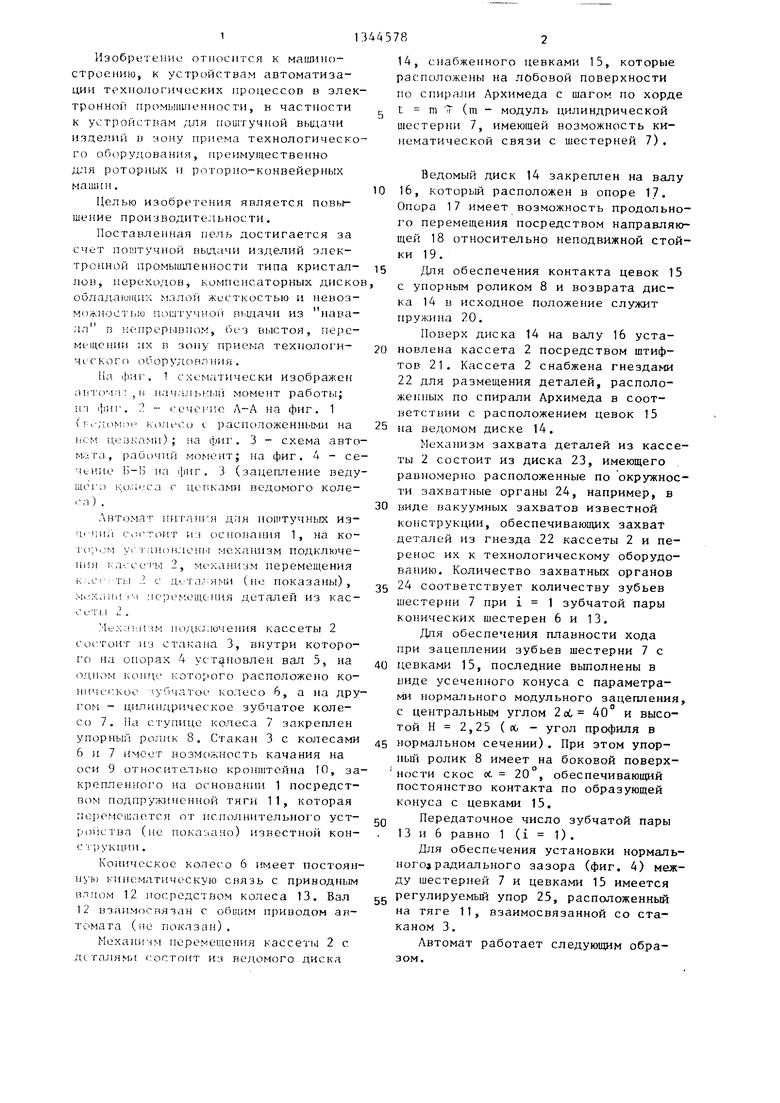
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая передача Иванова Е.Л. | 1983 |
|
SU1167376A1 |
| Роторная машина | 1988 |
|
SU1537474A1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| Роторный автомат питания | 1981 |
|
SU1065136A1 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| Роторный автомат питания | 1983 |
|
SU1129056A1 |
| Устройство для укладки изделий в пакет и поштучной выдачи изделий из пакета | 1986 |
|
SU1342844A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2634457C2 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С ВНЕЦЕНТРОИДНЫМ ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ ПЕТРОВСКОГО | 2021 |
|
RU2766626C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
Изобретение относится к области машиностроения, к устройствам автоматизации технологических процессов в электронной промышленности, в частности к устройствам для поштучной выдачи изделий в зону приема технологического оборудования преимущественно для роторных и роторно-конве- йерньсх машин. Целью изобретения является повышение производительности автомата за счет поштучной вьщачи изделий электронной промышленности типа кристаллов, переходов компенсаторных дисков, обладающих малой жесткостью и невозможностью поштучной выдачи из навала в непрерывном их перемещении в зону приема технологического оборудования. Автомат питания для штучных изделий содержит привод, механизм подачи кассеты с деталями, механизм перемещения деталей из.кассеты. Автомат снабжен механизмом включения подачи кассеты в виде управляемого поворотного стакана, имеющего передающий вал, на конце которого закреплены шестерни, одна из которых кинематически связана с общим приводом, а другая имеет возможность при включении механизма подачи кассеты кинематической связи с механизмом перемещения кассеты, выполненным в виде диска с цевками, при этом последняя шестерня снабжена упорным роликом. Механизм перемещения кассеты выполнен в виде ведомого диска, снабженного коническими цевками, на торцовой поверхности выполненными по спирали Архимеда, которые имеют возможность кинематической связи с шестерней, снабженной упорным роликом механизма включения подачи кассеты. На том же валу, на котором закреплен ведомьш диск с цевками поверх него закреплена кассета, имеющая гнезда дпя деталей, координаты которых соответствуют расположению цевок на ведомом диске, а опора, в которой расположен вал, имеет возможность Продольного перемещения посредством направляющей, расположенной в неподвижной стойке при перемещении ведомого диска шестерней, контактирующей с цевками, с последуюии1м возвратом в исходное положение от пружины при отключении механизма подачи кассеты. 1 з.п. ф-лы. 4 ил. а с ел оо
,2 Г5 2/ 22 15
iIt.
П
Фи,г.5
/ 15
Редактор Ю,Середа
Составитель В.Жиганов
Техред Л.Олейник Корректор И. Муска
Заказ 4882/17 Тираж 785Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
(ригА
| Загрузочное устройство | 1980 |
|
SU899327A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
